Differentiable Robust Model Predictive Control

0
📈
Sign in to get full access
Overview
- Deterministic model predictive control (MPC) is often insufficient for controlling autonomous systems in the real world due to factors like environmental noise and model error.
- Robust MPC algorithms aim to address the gap between deterministic and uncertain control, but can be difficult to tune for robustness.
- This paper presents a unifying perspective on differentiable optimization for control using the implicit function theorem (IFT), which enables the derivation of an efficient differentiable optimal control framework.
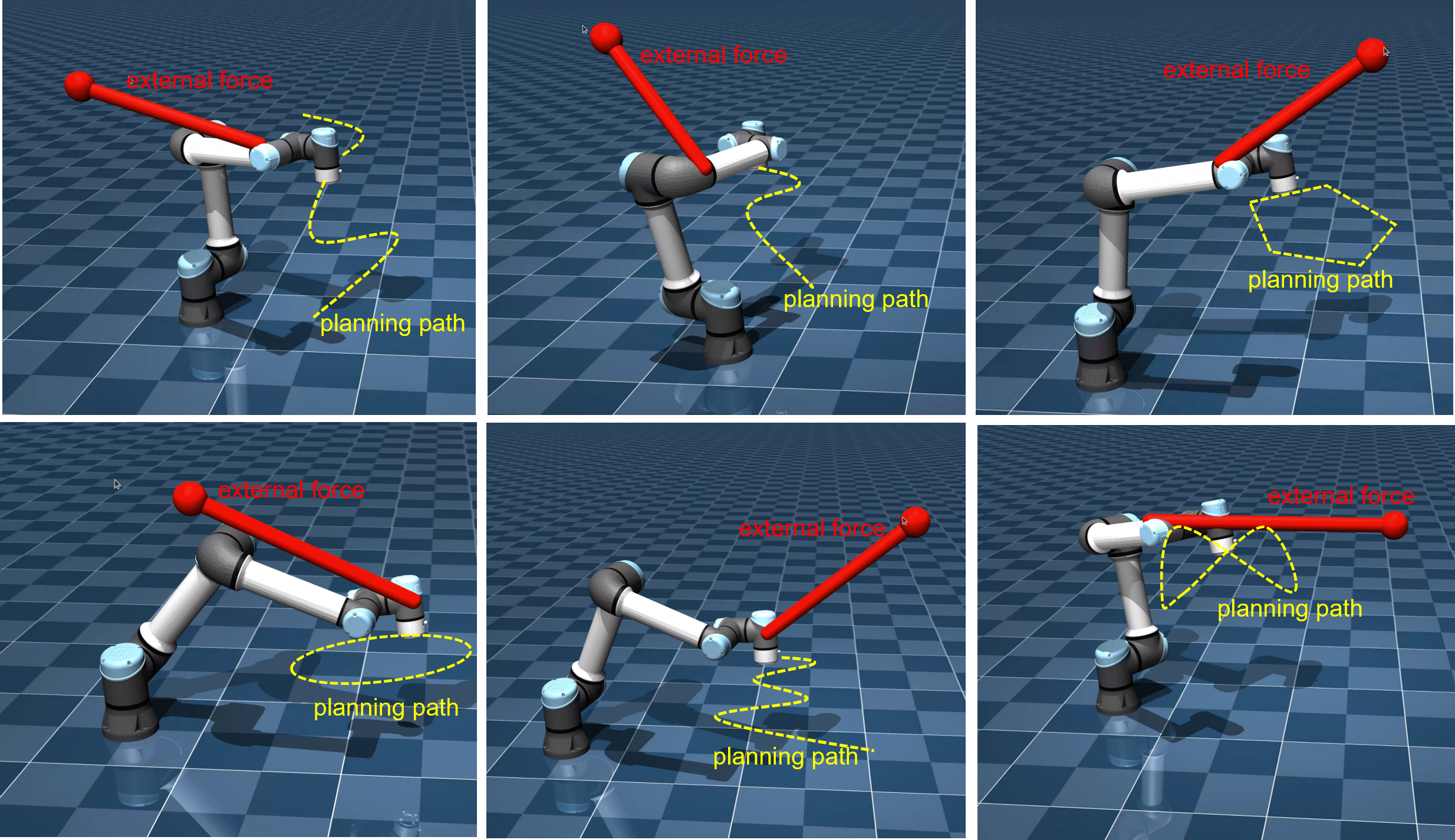
- The proposed algorithm combines this framework with a tube-based MPC architecture to enable automatic and real-time tuning of robust controllers in the presence of large uncertainties and disturbances.
- The algorithm is evaluated on multiple nonlinear robotic systems, demonstrating its effectiveness.
Plain English Explanation
The paper discusses the challenge of controlling autonomous systems in the real world using deterministic model predictive control (MPC). While deterministic MPC is powerful, it can be insufficient because real-world factors like environmental noise and model errors can cause the system to deviate from the expected performance.
To address this, the researchers present a new approach called "robust MPC." Robust MPC algorithms aim to bridge the gap between deterministic and uncertain control, but they can be difficult to tune properly due to the complex, non-intuitive effects that the controller parameters have on performance.
To overcome this challenge, the paper introduces a unifying perspective on differentiable optimization for control, using a mathematical technique called the implicit function theorem (IFT). This allows the researchers to derive an efficient, differentiable optimal control framework that can be combined with a tube-based MPC architecture to enable automatic and real-time tuning of robust controllers.
The key advantage of this approach is that it can handle large uncertainties and disturbances, which are common in real-world autonomous systems. The researchers evaluate their algorithm on several nonlinear robotic systems, including simulations and a hardware experiment, to demonstrate its effectiveness.
Technical Explanation
The paper presents a novel framework for robust model predictive control (MPC) that leverages the implicit function theorem (IFT) to enable efficient, differentiable optimization for control. This approach allows for the automatic and real-time tuning of robust controllers in the presence of large uncertainties and disturbances.
The researchers first establish a unifying perspective on differentiable optimization for control using the IFT, which draws parallels with differential dynamic programming. This framework enables the derivation of an efficient differentiable optimal control scheme that can be readily integrated with various MPC architectures.
The proposed algorithm pairs this differentiable optimization framework with a tube-based MPC architecture. The tube-based approach allows the controller to account for large uncertainties and disturbances by maintaining a robust invariant set around the nominal trajectory. By combining this with the differentiable optimization framework, the researchers are able to automatically and efficiently tune the robust controller parameters in real-time, addressing the challenge of tuning robust MPC controllers.
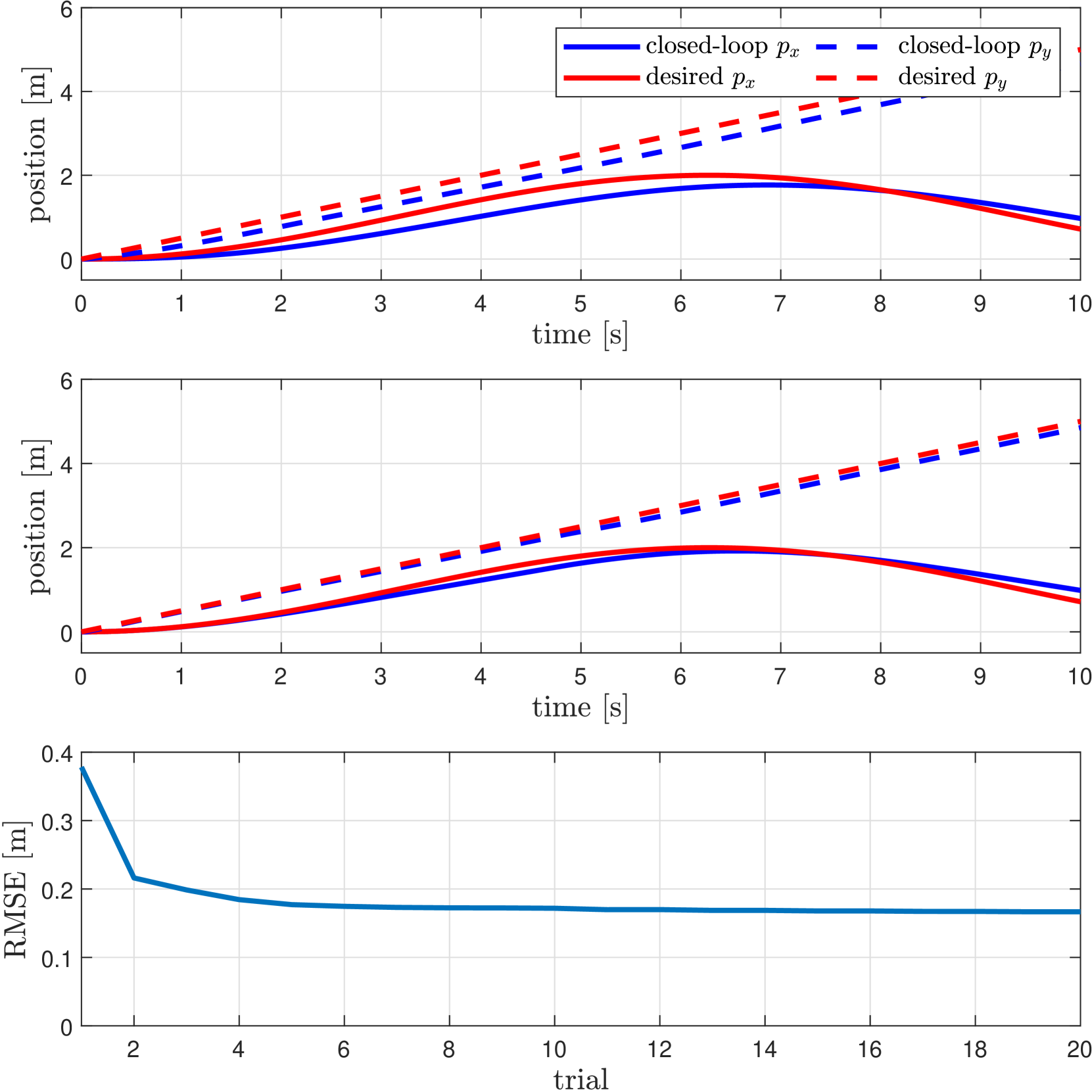
The efficacy of the proposed algorithm is demonstrated through extensive evaluations on multiple nonlinear robotic systems, including two simulated environments (MuJoCo) and one hardware experiment on the Robotarium testbed. The results show that the algorithm is able to effectively control the systems in the presence of significant uncertainties and disturbances.
Critical Analysis
The key strength of the proposed approach is its ability to automatically and efficiently tune robust MPC controllers in real-time, which addresses a significant challenge in the field of robust control. By leveraging the implicit function theorem, the researchers are able to derive a differentiable optimization framework that can be seamlessly integrated with a tube-based MPC architecture.
However, one potential limitation of the approach is that it relies on the availability of an accurate system model, which may not always be the case in real-world scenarios. While the paper demonstrates the algorithm's robustness to model errors, further investigation into the algorithm's performance with more significant model mismatch or in the presence of unstructured uncertainties could be valuable.
Additionally, the paper does not provide a comprehensive analysis of the computational complexity and runtime requirements of the proposed algorithm, which are important practical considerations for real-world deployment. A more detailed examination of the algorithm's scalability and performance under varying system sizes and complexity would help to further establish its feasibility for large-scale, high-dimensional applications.
Overall, the research presented in this paper represents a significant advancement in the field of robust control and offers a promising direction for the development of adaptive, self-tuning control systems for autonomous systems operating in uncertain environments.
Conclusion
This paper introduces a novel framework for robust model predictive control (MPC) that leverages the implicit function theorem to enable efficient, differentiable optimization for control. By combining this differentiable optimization approach with a tube-based MPC architecture, the researchers have developed an algorithm that can automatically and efficiently tune robust controllers in real-time, addressing a key challenge in the field of robust control.
The algorithm's effectiveness is demonstrated through evaluations on multiple nonlinear robotic systems, including simulations and a hardware experiment. The results show that the proposed approach can effectively control autonomous systems in the presence of large uncertainties and disturbances, making it a promising solution for real-world applications.
While the paper highlights the strengths of the proposed framework, further research is needed to address potential limitations, such as the reliance on accurate system models and the need for a more comprehensive analysis of the algorithm's computational and scalability properties. Nevertheless, this work represents a significant contribution to the field of robust control and paves the way for the development of adaptive, self-tuning control systems for a wide range of autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
0
Differentiable Robust Model Predictive Control
Alex Oshin, Hassan Almubarak, Evangelos A. Theodorou
Deterministic model predictive control (MPC), while powerful, is often insufficient for effectively controlling autonomous systems in the real-world. Factors such as environmental noise and model error can cause deviations from the expected nominal performance. Robust MPC algorithms aim to bridge this gap between deterministic and uncertain control. However, these methods are often excessively difficult to tune for robustness due to the nonlinear and non-intuitive effects that controller parameters have on performance. To address this challenge, we first present a unifying perspective on differentiable optimization for control using the implicit function theorem (IFT), from which existing state-of-the art methods can be derived. Drawing parallels with differential dynamic programming, the IFT enables the derivation of an efficient differentiable optimal control framework. The derived scheme is subsequently paired with a tube-based MPC architecture to facilitate the automatic and real-time tuning of robust controllers in the presence of large uncertainties and disturbances. The proposed algorithm is benchmarked on multiple nonlinear robotic systems, including two systems in the MuJoCo simulator environment and one hardware experiment on the Robotarium testbed, to demonstrate its efficacy.
Read more7/29/2024
👁️
0
A Linear MPC with Control Barrier Functions for Differential Drive Robots
Ali Mohamed Ali, Chao Shen, Hashim A. Hashim
The need for fully autonomous mobile robots has surged over the past decade, with the imperative of ensuring safe navigation in a dynamic setting emerging as a primary challenge impeding advancements in this domain. In this paper, a Safety Critical Model Predictive Control based on Dynamic Feedback Linearization tailored to the application of differential drive robots with two wheels is proposed to generate control signals that result in obstacle-free paths. A barrier function introduces a safety constraint to the optimization problem of the Model Predictive Control (MPC) to prevent collisions. Due to the intrinsic nonlinearities of the differential drive robots, computational complexity while implementing a Nonlinear Model Predictive Control (NMPC) arises. To facilitate the real-time implementation of the optimization problem and to accommodate the underactuated nature of the robot, a combination of Linear Model Predictive Control (LMPC) and Dynamic Feedback Linearization (DFL) is proposed. The MPC problem is formulated on a linear equivalent model of the differential drive robot rendered by the DFL controller. The analysis of the closed-loop stability and recursive feasibility of the proposed control design is discussed. Numerical experiments illustrate the robustness and effectiveness of the proposed control synthesis in avoiding obstacles with respect to the benchmark of using Euclidean distance constraints. Keywords: Model Predictive Control, MPC, Autonomous Ground Vehicles, Nonlinearity, Dynamic Feedback Linearization, Optimal Control, Differential Robots.
Read more4/17/2024
0
Self-Adaptive Robust Motion Planning for High DoF Robot Manipulator using Deep MPC
Ye Zhang, Kangtong Mo, Fangzhou Shen, Xuanzhen Xu, Xingyu Zhang, Jiayue Yu, Chang Yu
In contemporary control theory, self-adaptive methodologies are highly esteemed for their inherent flexibility and robustness in managing modeling uncertainties. Particularly, robust adaptive control stands out owing to its potent capability of leveraging robust optimization algorithms to approximate cost functions and relax the stringent constraints often associated with conventional self-adaptive control paradigms. Deep learning methods, characterized by their extensive layered architecture, offer significantly enhanced approximation prowess. Notwithstanding, the implementation of deep learning is replete with challenges, particularly the phenomena of vanishing and exploding gradients encountered during the training process. This paper introduces a self-adaptive control scheme integrating a deep MPC, governed by an innovative weight update law designed to mitigate the vanishing and exploding gradient predicament by employing the gradient sign exclusively. The proffered controller is a self-adaptive dynamic inversion mechanism, integrating an augmented state observer within an auxiliary estimation circuit to enhance the training phase. This approach enables the deep MPC to learn the entire plant model in real-time and the efficacy of the controller is demonstrated through simulations involving a high-DoF robot manipulator, wherein the controller adeptly learns the nonlinear plant dynamics expeditiously and exhibits commendable performance in the motion planning task.
Read more7/19/2024
0
DiffTune-MPC: Closed-Loop Learning for Model Predictive Control
Ran Tao, Sheng Cheng, Xiaofeng Wang, Shenlong Wang, Naira Hovakimyan
Model predictive control (MPC) has been applied to many platforms in robotics and autonomous systems for its capability to predict a system's future behavior while incorporating constraints that a system may have. To enhance the performance of a system with an MPC controller, one can manually tune the MPC's cost function. However, it can be challenging due to the possibly high dimension of the parameter space as well as the potential difference between the open-loop cost function in MPC and the overall closed-loop performance metric function. This paper presents DiffTune-MPC, a novel learning method, to learn the cost function of an MPC in a closed-loop manner. The proposed framework is compatible with the scenario where the time interval for performance evaluation and MPC's planning horizon have different lengths. We show the auxiliary problem whose solution admits the analytical gradients of MPC and discuss its variations in different MPC settings, including nonlinear MPCs that are solved using sequential quadratic programming. Simulation results demonstrate the learning capability of DiffTune-MPC and the generalization capability of the learned MPC parameters.
Read more7/8/2024