Discovering Car-following Dynamics from Trajectory Data through Deep Learning

0

Sign in to get full access
Overview
- This paper presents a deep learning approach to discover car-following dynamics from trajectory data.
- The proposed method uses a deep neural network to learn the underlying rules that govern how vehicles follow each other on the road.
- The key insights and contributions of the paper are:
- It develops a novel deep learning architecture to model car-following behavior.
- It demonstrates the ability to accurately predict future vehicle trajectories based on the learned dynamics.
- It provides interpretable insights into the factors that influence car-following dynamics.
Plain English Explanation
The paper explores how we can use deep learning to better understand the behavior of vehicles on the road. Specifically, it looks at the phenomenon of "car following", where a driver's actions are influenced by the vehicle in front of them.
The researchers developed a deep neural network model that can analyze vehicle trajectory data - the paths that cars take as they drive. By training this model on real-world driving data, they were able to uncover the underlying "rules" that govern how drivers follow the cars in front of them.
For example, the model might learn that drivers tend to maintain a certain distance from the car ahead, and adjust their speed accordingly. It can also pick up on more subtle factors, like how a driver's following behavior changes based on the relative speeds of the two vehicles.
By understanding these car-following dynamics, the researchers believe we can build better predictive models of traffic flow and driver behavior. This could have important applications in areas like autonomous vehicle development and traffic management.
The key innovation here is using deep learning as a tool to reverse-engineer the complex decision-making processes that govern how drivers interact with each other on the road. Rather than relying on manually-defined rules, the model discovers these rules automatically from the data.
Technical Explanation
The paper presents a deep learning approach to modeling car-following dynamics. The proposed method uses a long short-term memory (LSTM) network to process sequential vehicle trajectory data and learn the underlying rules that govern how vehicles follow each other.
The LSTM model takes as input the current state of the lead and following vehicles, including their positions, speeds, and accelerations. It then outputs a predicted future trajectory for the following vehicle. By training the model on large datasets of real-world driving data, it can learn to accurately predict how a driver will respond to the movement of the vehicle in front of them.
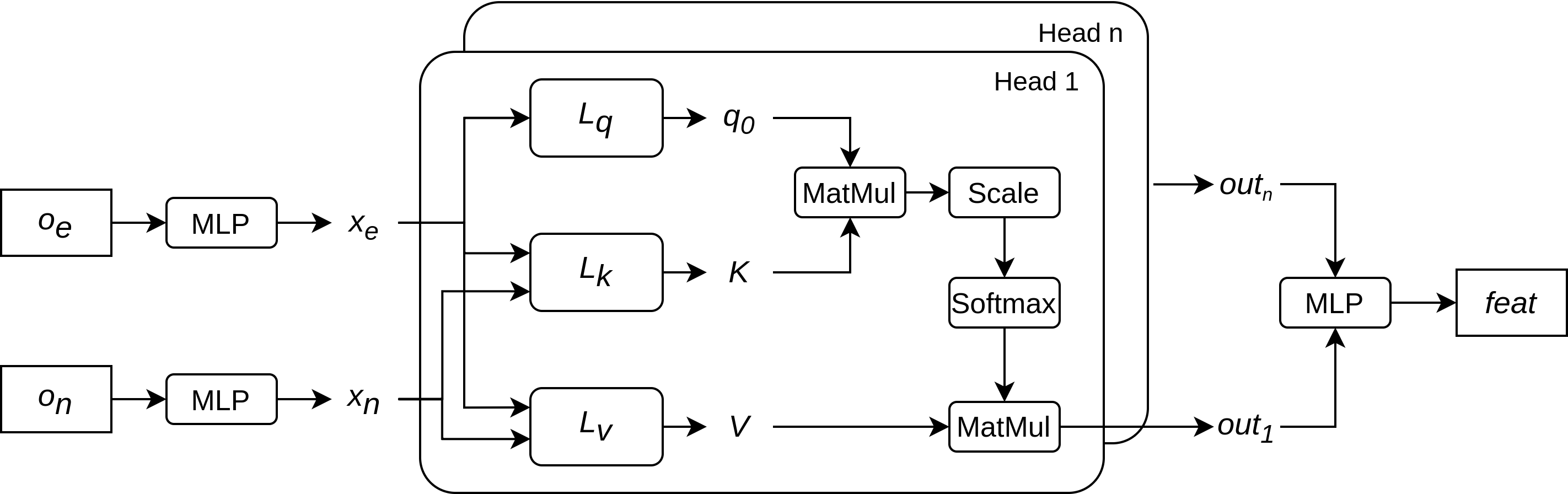
A key innovation of the paper is the inclusion of an attention mechanism in the LSTM architecture. This allows the model to dynamically focus on the most relevant features when making its predictions, providing greater interpretability into the factors that influence car-following behavior.
The authors demonstrate the effectiveness of their approach through extensive experiments on real-world trajectory datasets. They show that the deep learning model outperforms traditional car-following models in terms of trajectory prediction accuracy. Additionally, the attention weights learned by the model provide insights into the important variables that shape car-following dynamics, such as relative speed and distance.
Critical Analysis
The paper presents a compelling application of deep learning to the problem of understanding and modeling car-following behavior. By using a data-driven approach, the researchers are able to uncover the complex, often non-linear relationships that govern how drivers interact with each other on the road.
One strength of the work is the inclusion of the attention mechanism, which helps make the model's predictions more interpretable. This is an important consideration, as we often want to understand not just the "what" of a model's predictions, but the "why" behind them.
That said, the paper does not delve deeply into the potential limitations or caveats of the approach. For example, it would be interesting to understand how the model's performance might be affected by factors like weather, road conditions, or driver characteristics. Additionally, the reliance on trajectory data alone may miss important contextual information that could influence car-following behavior.
Further research in this area could explore ways to incorporate richer data sources, such as video, sensor data, or driver physiological signals. Incorporating such multimodal inputs could lead to even more accurate and insightful models of driver behavior.
Conclusion
This paper presents a novel deep learning approach for discovering the underlying dynamics of car-following behavior from vehicle trajectory data. By training a deep LSTM model with an attention mechanism, the researchers were able to not only accurately predict future vehicle trajectories, but also gain interpretable insights into the key factors that shape how drivers interact with each other on the road.
The ability to reverse-engineer these complex behavioral patterns has important implications for fields like autonomous vehicle development, traffic management, and transportation planning. As we work towards smarter, more efficient transportation systems, tools like the one described in this paper will be invaluable for building a deeper understanding of human driving behavior.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Discovering Car-following Dynamics from Trajectory Data through Deep Learning
Ohay Angah (Jeff), James Enouen (Jeff), Xuegang (Jeff), Ban, Yan Liu
This study aims to discover the governing mathematical expressions of car-following dynamics from trajectory data directly using deep learning techniques. We propose an expression exploration framework based on deep symbolic regression (DSR) integrated with a variable intersection selection (VIS) method to find variable combinations that encourage interpretable and parsimonious mathematical expressions. In the exploration learning process, two penalty terms are added to improve the reward function: (i) a complexity penalty to regulate the complexity of the explored expressions to be parsimonious, and (ii) a variable interaction penalty to encourage the expression exploration to focus on variable combinations that can best describe the data. We show the performance of the proposed method to learn several car-following dynamics models and discuss its limitations and future research directions.
Read more8/2/2024

0
TrACT: A Training Dynamics Aware Contrastive Learning Framework for Long-tail Trajectory Prediction
Junrui Zhang, Mozhgan Pourkeshavarz, Amir Rasouli
As a safety critical task, autonomous driving requires accurate predictions of road users' future trajectories for safe motion planning, particularly under challenging conditions. Yet, many recent deep learning methods suffer from a degraded performance on the challenging scenarios, mainly because these scenarios appear less frequently in the training data. To address such a long-tail issue, existing methods force challenging scenarios closer together in the feature space during training to trigger information sharing among them for more robust learning. These methods, however, primarily rely on the motion patterns to characterize scenarios, omitting more informative contextual information, such as interactions and scene layout. We argue that exploiting such information not only improves prediction accuracy but also scene compliance of the generated trajectories. In this paper, we propose to incorporate richer training dynamics information into a prototypical contrastive learning framework. More specifically, we propose a two-stage process. First, we generate rich contextual features using a baseline encoder-decoder framework. These features are split into clusters based on the model's output errors, using the training dynamics information, and a prototype is computed within each cluster. Second, we retrain the model using the prototypes in a contrastive learning framework. We conduct empirical evaluations of our approach using two large-scale naturalistic datasets and show that our method achieves state-of-the-art performance by improving accuracy and scene compliance on the long-tail samples. Furthermore, we perform experiments on a subset of the clusters to highlight the additional benefit of our approach in reducing training bias.
Read more5/1/2024
0
Demystifying the Physics of Deep Reinforcement Learning-Based Autonomous Vehicle Decision-Making
Hanxi Wan, Pei Li, Arpan Kusari
With the advent of universal function approximators in the domain of reinforcement learning, the number of practical applications leveraging deep reinforcement learning (DRL) has exploded. Decision-making in autonomous vehicles (AVs) has emerged as a chief application among them, taking the sensor data or the higher-order kinematic variables as the input and providing a discrete choice or continuous control output. There has been a continuous effort to understand the black-box nature of the DRL models, but so far, there hasn't been any discussion (to the best of authors' knowledge) about how the models learn the physical process. This presents an overwhelming limitation that restricts the real-world deployment of DRL in AVs. Therefore, in this research work, we try to decode the knowledge learnt by the attention-based DRL framework about the physical process. We use a continuous proximal policy optimization-based DRL algorithm as the baseline model and add a multi-head attention framework in an open-source AV simulation environment. We provide some analytical techniques for discussing the interpretability of the trained models in terms of explainability and causality for spatial and temporal correlations. We show that the weights in the first head encode the positions of the neighboring vehicles while the second head focuses on the leader vehicle exclusively. Also, the ego vehicle's action is causally dependent on the vehicles in the target lane spatially and temporally. Through these findings, we reliably show that these techniques can help practitioners decipher the results of the DRL algorithms.
Read more6/14/2024
🤿
0
Enhancing Deep Traffic Forecasting Models with Dynamic Regression
Vincent Zhihao Zheng, Seongjin Choi, Lijun Sun
Deep learning models for traffic forecasting often assume the residual is independent and isotropic across time and space. This assumption simplifies loss functions such as mean absolute error, but real-world residual processes often exhibit significant autocorrelation and structured spatiotemporal correlation. This paper introduces a dynamic regression (DR) framework to enhance existing spatiotemporal traffic forecasting models by incorporating structured learning for the residual process. We assume the residual of the base model (i.e., a well-developed traffic forecasting model) follows a matrix-variate seasonal autoregressive (AR) model, which is seamlessly integrated into the training process through the redesign of the loss function. Importantly, the parameters of the DR framework are jointly optimized alongside the base model. We evaluate the effectiveness of the proposed framework on state-of-the-art (SOTA) deep traffic forecasting models using both speed and flow datasets, demonstrating improved performance and providing interpretable AR coefficients and spatiotemporal covariance matrices.
Read more6/3/2024