Demystifying the Physics of Deep Reinforcement Learning-Based Autonomous Vehicle Decision-Making

0
Sign in to get full access
Overview
- This paper explores the use of deep reinforcement learning (DRL) for autonomous vehicle decision-making, aiming to demystify the inner workings of these complex systems.
- The researchers investigate the role of attention mechanisms and explainability techniques in enhancing the transparency and interpretability of DRL-based autonomous driving models.
- The study also examines the impact of causal reasoning on the decision-making process, providing insights into the underlying factors that influence autonomous vehicle behavior.
Plain English Explanation
Self-driving cars are a complex and rapidly evolving technology, and it's not always easy to understand how they actually work. This research paper takes a closer look at the decision-making process used by autonomous vehicles that are powered by a technique called deep reinforcement learning (DRL).
DRL is a type of artificial intelligence that allows the car to learn from its experiences and make decisions on its own, without being explicitly programmed with every possible scenario. However, this can also make it challenging to understand why the car is making certain choices, which is important for building trust and ensuring the safety of self-driving technology.
To address this, the researchers in this paper investigated the use of "attention" mechanisms and "explainability" techniques. Attention allows the car to focus on the most relevant information when making a decision, while explainability techniques help explain the car's thought process in a way that humans can understand.
The study also looked at the role of "causal reasoning" - the ability to understand the underlying factors that influence the car's behavior. By understanding these causal relationships, the researchers hoped to gain deeper insights into how autonomous vehicles make decisions and how to make those decisions more transparent and trustworthy.
Overall, this research aims to lift the veil on the inner workings of DRL-based autonomous vehicles, making it easier for people to understand and trust this transformative technology as it continues to evolve.
Technical Explanation
The paper explores the use of deep reinforcement learning (DRL) for autonomous vehicle decision-making, focusing on the role of attention mechanisms, explainability techniques, and causal reasoning.
The researchers first provide background on DRL and its application to autonomous driving, highlighting the challenges associated with the black-box nature of these systems. They then introduce attention mechanisms, which allow the DRL model to focus on the most relevant information when making decisions. This can enhance the interpretability of the model's decision-making process.
To further improve explainability, the paper explores the integration of post-hoc explainability techniques, such as SHAP and CARSExplainer, into the DRL framework. These techniques aim to provide human-understandable explanations for the model's actions.
The researchers also investigate the role of causal reasoning in autonomous vehicle decision-making. By incorporating causal models, the DRL system can better understand the underlying factors that influence its choices, as demonstrated in HighwayLLM and Context-LEARN.
The paper presents experiments conducted on simulated driving scenarios, where the proposed DRL-based decision-making framework, incorporating attention, explainability, and causal reasoning, is evaluated against baseline approaches. The results show improvements in the transparency and interpretability of the autonomous vehicle's behavior, while maintaining satisfactory driving performance.
Critical Analysis
The paper provides a comprehensive exploration of techniques to enhance the transparency and interpretability of DRL-based autonomous vehicle decision-making. The integration of attention mechanisms, explainability techniques, and causal reasoning represents a significant step forward in addressing the black-box nature of these complex systems.
However, the paper acknowledges that the proposed approaches may introduce additional computational overhead and model complexity, which could impact the real-time performance and scalability of the autonomous driving system. Further research is needed to optimize the balance between explainability and computational efficiency.
Additionally, while the paper demonstrates the benefits of these techniques in simulated environments, it is essential to validate the findings in real-world driving scenarios, where the complexity and unpredictability of traffic situations may pose new challenges. Bridging the gap between simulation and real-world deployment is a crucial area for future work.
Furthermore, the paper does not delve deeply into the ethical implications of autonomous vehicle decision-making, particularly concerning the prioritization of different factors (e.g., passenger safety, pedestrian safety, traffic optimization) and the potential for biases in the training data or decision-making algorithms. Exploring the ethical considerations of DRL-based autonomous driving is an important avenue for future research.
Conclusion
This paper takes an important step towards demystifying the inner workings of deep reinforcement learning-based autonomous vehicle decision-making. By incorporating attention mechanisms, explainability techniques, and causal reasoning, the researchers have made significant progress in enhancing the transparency and interpretability of these complex systems.
The insights gained from this research have the potential to build greater trust in autonomous driving technology and pave the way for more responsible and accountable deployment of self-driving cars. As the field of autonomous driving continues to evolve, the principles and techniques explored in this paper will likely become increasingly crucial in shaping the future of transportation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Demystifying the Physics of Deep Reinforcement Learning-Based Autonomous Vehicle Decision-Making
Hanxi Wan, Pei Li, Arpan Kusari
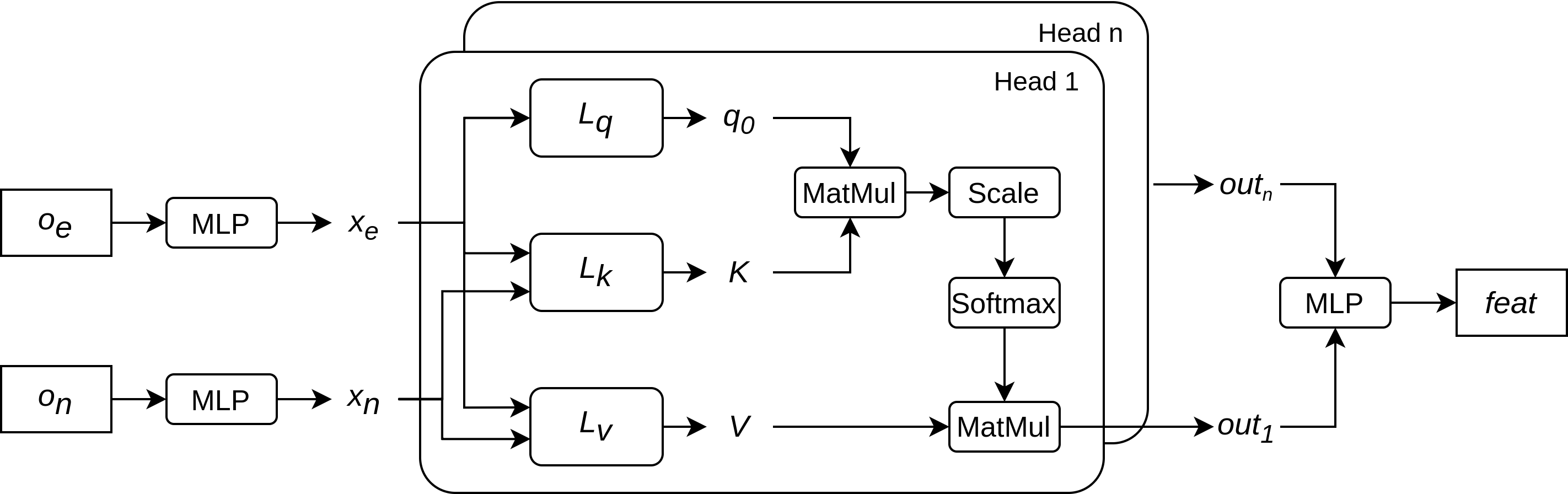
With the advent of universal function approximators in the domain of reinforcement learning, the number of practical applications leveraging deep reinforcement learning (DRL) has exploded. Decision-making in autonomous vehicles (AVs) has emerged as a chief application among them, taking the sensor data or the higher-order kinematic variables as the input and providing a discrete choice or continuous control output. There has been a continuous effort to understand the black-box nature of the DRL models, but so far, there hasn't been any discussion (to the best of authors' knowledge) about how the models learn the physical process. This presents an overwhelming limitation that restricts the real-world deployment of DRL in AVs. Therefore, in this research work, we try to decode the knowledge learnt by the attention-based DRL framework about the physical process. We use a continuous proximal policy optimization-based DRL algorithm as the baseline model and add a multi-head attention framework in an open-source AV simulation environment. We provide some analytical techniques for discussing the interpretability of the trained models in terms of explainability and causality for spatial and temporal correlations. We show that the weights in the first head encode the positions of the neighboring vehicles while the second head focuses on the leader vehicle exclusively. Also, the ego vehicle's action is causally dependent on the vehicles in the target lane spatially and temporally. Through these findings, we reliably show that these techniques can help practitioners decipher the results of the DRL algorithms.
Read more6/14/2024

0
Deep Attention Driven Reinforcement Learning (DAD-RL) for Autonomous Vehicle Decision-Making in Dynamic Environment
Jayabrata Chowdhury, Venkataramanan Shivaraman, Sumit Dangi, Suresh Sundaram, P. B. Sujit
Autonomous Vehicle (AV) decision making in urban environments is inherently challenging due to the dynamic interactions with surrounding vehicles. For safe planning, AV must understand the weightage of various spatiotemporal interactions in a scene. Contemporary works use colossal transformer architectures to encode interactions mainly for trajectory prediction, resulting in increased computational complexity. To address this issue without compromising spatiotemporal understanding and performance, we propose the simple Deep Attention Driven Reinforcement Learning (DADRL) framework, which dynamically assigns and incorporates the significance of surrounding vehicles into the ego's RL driven decision making process. We introduce an AV centric spatiotemporal attention encoding (STAE) mechanism for learning the dynamic interactions with different surrounding vehicles. To understand map and route context, we employ a context encoder to extract features from context maps. The spatiotemporal representations combined with contextual encoding provide a comprehensive state representation. The resulting model is trained using the Soft Actor Critic (SAC) algorithm. We evaluate the proposed framework on the SMARTS urban benchmarking scenarios without traffic signals to demonstrate that DADRL outperforms recent state of the art methods. Furthermore, an ablation study underscores the importance of the context-encoder and spatio temporal attention encoder in achieving superior performance.
Read more7/15/2024
🤿
0
Research on Autonomous Driving Decision-making Strategies based Deep Reinforcement Learning
Zixiang Wang, Hao Yan, Changsong Wei, Junyu Wang, Shi Bo, Minheng Xiao
The behavior decision-making subsystem is a key component of the autonomous driving system, which reflects the decision-making ability of the vehicle and the driver, and is an important symbol of the high-level intelligence of the vehicle. However, the existing rule-based decision-making schemes are limited by the prior knowledge of designers, and it is difficult to cope with complex and changeable traffic scenarios. In this work, an advanced deep reinforcement learning model is adopted, which can autonomously learn and optimize driving strategies in a complex and changeable traffic environment by modeling the driving decision-making process as a reinforcement learning problem. Specifically, we used Deep Q-Network (DQN) and Proximal Policy Optimization (PPO) for comparative experiments. DQN guides the agent to choose the best action by approximating the state-action value function, while PPO improves the decision-making quality by optimizing the policy function. We also introduce improvements in the design of the reward function to promote the robustness and adaptability of the model in real-world driving situations. Experimental results show that the decision-making strategy based on deep reinforcement learning has better performance than the traditional rule-based method in a variety of driving tasks.
Read more8/7/2024

0
Decentralized Semantic Traffic Control in AVs Using RL and DQN for Dynamic Roadblocks
Emanuel Figetakis, Yahuza Bello, Ahmed Refaey, Abdallah Shami
Autonomous Vehicles (AVs), furnished with sensors capable of capturing essential vehicle dynamics such as speed, acceleration, and precise location, possess the capacity to execute intelligent maneuvers, including lane changes, in anticipation of approaching roadblocks. Nevertheless, the sheer volume of sensory data and the processing necessary to derive informed decisions can often overwhelm the vehicles, rendering them unable to handle the task independently. Consequently, a common approach in traffic scenarios involves transmitting the data to servers for processing, a practice that introduces challenges, particularly in situations demanding real-time processing. In response to this challenge, we present a novel DL-based semantic traffic control system that entrusts semantic encoding responsibilities to the vehicles themselves. This system processes driving decisions obtained from a Reinforcement Learning (RL) agent, streamlining the decision-making process. Specifically, our framework envisions scenarios where abrupt roadblocks materialize due to factors such as road maintenance, accidents, or vehicle repairs, necessitating vehicles to make determinations concerning lane-keeping or lane-changing actions to navigate past these obstacles. To formulate this scenario mathematically, we employ a Markov Decision Process (MDP) and harness the Deep Q Learning (DQN) algorithm to unearth viable solutions.
Read more6/28/2024