Disentangling Uncertainty for Safe Social Navigation using Deep Reinforcement Learning

0

Sign in to get full access
Overview
- This paper explores using deep reinforcement learning to enable safe social navigation for robots or autonomous vehicles
- The key idea is to disentangle different forms of uncertainty to better navigate dynamic environments with humans
- The proposed approach aims to make navigation safer and more reliable by accounting for different types of uncertainty
Plain English Explanation
The paper describes a technique that uses deep reinforcement learning to help robots or self-driving cars navigate crowded, unpredictable environments more safely. The core innovation is "disentangling uncertainty" - separating out different kinds of uncertainty (e.g. about the environment, about human behavior) and addressing each one appropriately.
By breaking down the various uncertainties involved in navigation, the approach can make more informed, nuanced decisions. For example, it may be very uncertain about a pedestrian's exact future path, but fairly certain that the pedestrian is unpredictable. The system can then plan a route that gives unpredictable pedestrians a wide berth, even if their precise trajectory is unknown.
This is important for making robot and autonomous vehicle navigation safer and more reliable, especially in crowded, dynamic environments with lots of human activity. Accounting for different forms of uncertainty allows the system to navigate more cautiously and avoid potentially dangerous situations.
Technical Explanation
The paper proposes a deep reinforcement learning framework for safe social navigation that disentangles uncertainty into three key components:
- Environmental Uncertainty: Uncertainty about the static environment, like walls or obstacles.
- Interaction Uncertainty: Uncertainty about how nearby humans will behave and interact.
- Epistemic Uncertainty: Uncertainty about the agent's own knowledge and model parameters.
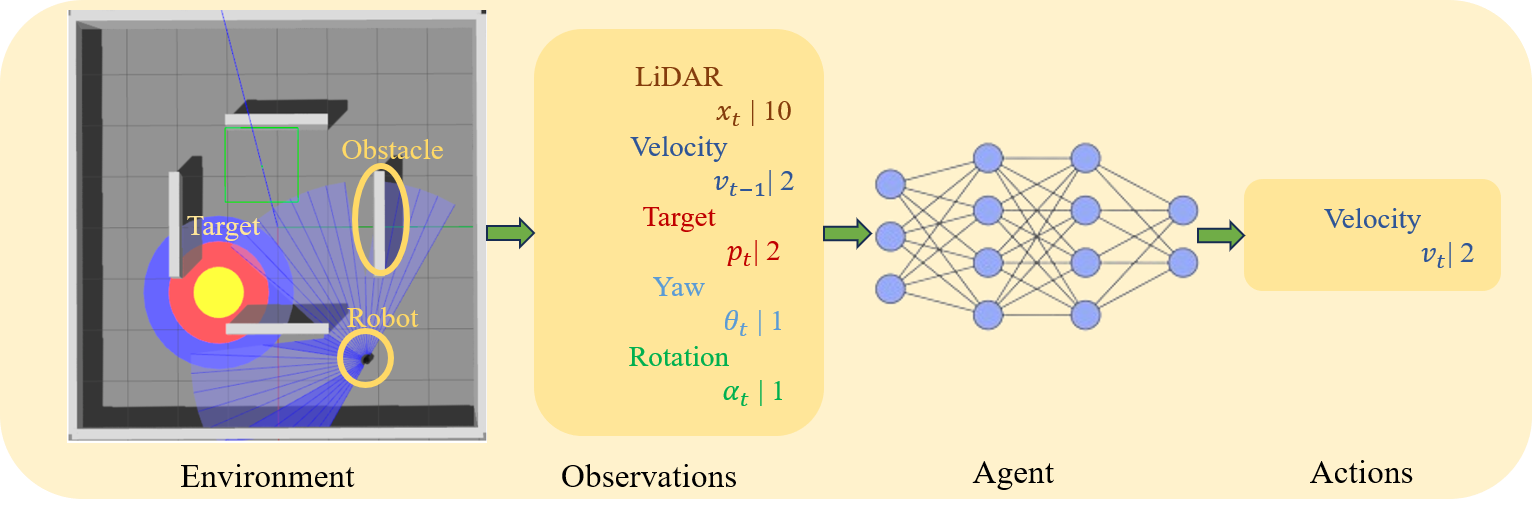
The system uses a deep neural network policy that takes in observations of the environment, nearby humans, and the agent's own state, and outputs an action to safely navigate the space. Crucially, the network has separate output heads for each type of uncertainty, allowing the agent to reason about and respond to them differently.
For example, high interaction uncertainty might cause the agent to keep extra distance from unpredictable pedestrians, while high epistemic uncertainty could make it move more cautiously overall until it is more confident in its model. The authors demonstrate the effectiveness of this approach in simulation experiments involving a mobile robot navigating crowded environments with humans.
Critical Analysis
The paper provides a well-designed and thorough evaluation of the proposed uncertainty-aware navigation framework. The experiments show clear benefits over baseline approaches in terms of safety metrics like collisions and time to goal.
However, the paper does not address some key limitations and open questions:
- The simulated environments, while realistic, may not fully capture the complexity of real-world urban settings. Further testing in physical robot trials would be important to validate the approach.
- The system assumes that it can accurately estimate the different types of uncertainty, which may be challenging in practice. Sensitivity to errors or biases in uncertainty estimation is not explored.
- The paper does not discuss how the approach might scale to very large, dense crowds or highly dynamic environments. The computational requirements and real-time performance aspects are unclear.
Nonetheless, the core idea of disentangling and reasoning about different forms of uncertainty is a promising direction for enhancing the safety and reliability of autonomous navigation systems. Further research building on this work could lead to important advances in this critical area.
Conclusion
This paper presents a novel deep reinforcement learning framework for safe social navigation that explicitly models and responds to different types of uncertainty. By breaking down uncertainty into environmental, interaction, and epistemic components, the system can make more nuanced and cautious decisions to avoid dangerous situations.
The promising simulation results demonstrate the potential of this approach for improving the safety and robustness of robot and autonomous vehicle navigation, especially in crowded, dynamic environments. However, additional research is needed to fully validate the technique in real-world conditions and address remaining challenges around scaling and uncertainty estimation.
Overall, this work represents an important step forward in developing more reliable and trustworthy autonomous navigation systems that can safely coexist with humans in the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Disentangling Uncertainty for Safe Social Navigation using Deep Reinforcement Learning
Daniel Flogel, Marcos G'omez Villafa~ne, Joshua Ransiek, Soren Hohmann
Autonomous mobile robots are increasingly employed in pedestrian-rich environments where safe navigation and appropriate human interaction are crucial. While Deep Reinforcement Learning (DRL) enables socially integrated robot behavior, challenges persist in novel or perturbed scenarios to indicate when and why the policy is uncertain. Unknown uncertainty in decision-making can lead to collisions or human discomfort and is one reason why safe and risk-aware navigation is still an open problem. This work introduces a novel approach that integrates aleatoric, epistemic, and predictive uncertainty estimation into a DRL-based navigation framework for uncertainty estimates in decision-making. We, therefore, incorporate Observation-Dependent Variance (ODV) and dropout into the Proximal Policy Optimization (PPO) algorithm. For different types of perturbations, we compare the ability of Deep Ensembles and Monte-Carlo Dropout (MC-Dropout) to estimate the uncertainties of the policy. In uncertain decision-making situations, we propose to change the robot's social behavior to conservative collision avoidance. The results show that the ODV-PPO algorithm converges faster with better generalization and disentangles the aleatoric and epistemic uncertainties. In addition, the MC-Dropout approach is more sensitive to perturbations and capable to correlate the uncertainty type to the perturbation type better. With the proposed safe action selection scheme, the robot can navigate in perturbed environments with fewer collisions.
Read more9/18/2024

0
Uncertainty-Aware DRL for Autonomous Vehicle Crowd Navigation in Shared Space
Mahsa Golchoubian, Moojan Ghafurian, Kerstin Dautenhahn, Nasser Lashgarian Azad
Safe, socially compliant, and efficient navigation of low-speed autonomous vehicles (AVs) in pedestrian-rich environments necessitates considering pedestrians' future positions and interactions with the vehicle and others. Despite the inevitable uncertainties associated with pedestrians' predicted trajectories due to their unobserved states (e.g., intent), existing deep reinforcement learning (DRL) algorithms for crowd navigation often neglect these uncertainties when using predicted trajectories to guide policy learning. This omission limits the usability of predictions when diverging from ground truth. This work introduces an integrated prediction and planning approach that incorporates the uncertainties of predicted pedestrian states in the training of a model-free DRL algorithm. A novel reward function encourages the AV to respect pedestrians' personal space, decrease speed during close approaches, and minimize the collision probability with their predicted paths. Unlike previous DRL methods, our model, designed for AV operation in crowded spaces, is trained in a novel simulation environment that reflects realistic pedestrian behaviour in a shared space with vehicles. Results show a 40% decrease in collision rate and a 15% increase in minimum distance to pedestrians compared to the state of the art model that does not account for prediction uncertainty. Additionally, the approach outperforms model predictive control methods that incorporate the same prediction uncertainties in terms of both performance and computational time, while producing trajectories closer to human drivers in similar scenarios.
Read more5/24/2024
0
Deep Reinforcement Learning with Enhanced PPO for Safe Mobile Robot Navigation
Hamid Taheri, Seyed Rasoul Hosseini, Mohammad Ali Nekoui
Collision-free motion is essential for mobile robots. Most approaches to collision-free and efficient navigation with wheeled robots require parameter tuning by experts to obtain good navigation behavior. This study investigates the application of deep reinforcement learning to train a mobile robot for autonomous navigation in a complex environment. The robot utilizes LiDAR sensor data and a deep neural network to generate control signals guiding it toward a specified target while avoiding obstacles. We employ two reinforcement learning algorithms in the Gazebo simulation environment: Deep Deterministic Policy Gradient and proximal policy optimization. The study introduces an enhanced neural network structure in the Proximal Policy Optimization algorithm to boost performance, accompanied by a well-designed reward function to improve algorithm efficacy. Experimental results conducted in both obstacle and obstacle-free environments underscore the effectiveness of the proposed approach. This research significantly contributes to the advancement of autonomous robotics in complex environments through the application of deep reinforcement learning.
Read more8/9/2024

0
NavRL: Learning Safe Flight in Dynamic Environments
Zhefan Xu, Xinming Han, Haoyu Shen, Hanyu Jin, Kenji Shimada
Safe flight in dynamic environments requires autonomous unmanned aerial vehicles (UAVs) to make effective decisions when navigating cluttered spaces with moving obstacles. Traditional approaches often decompose decision-making into hierarchical modules for prediction and planning. Although these handcrafted systems can perform well in specific settings, they might fail if environmental conditions change and often require careful parameter tuning. Additionally, their solutions could be suboptimal due to the use of inaccurate mathematical model assumptions and simplifications aimed at achieving computational efficiency. To overcome these limitations, this paper introduces the NavRL framework, a deep reinforcement learning-based navigation method built on the Proximal Policy Optimization (PPO) algorithm. NavRL utilizes our carefully designed state and action representations, allowing the learned policy to make safe decisions in the presence of both static and dynamic obstacles, with zero-shot transfer from simulation to real-world flight. Furthermore, the proposed method adopts a simple but effective safety shield for the trained policy, inspired by the concept of velocity obstacles, to mitigate potential failures associated with the black-box nature of neural networks. To accelerate the convergence, we implement the training pipeline using NVIDIA Isaac Sim, enabling parallel training with thousands of quadcopters. Simulation and physical experiments show that our method ensures safe navigation in dynamic environments and results in the fewest collisions compared to benchmarks in scenarios with dynamic obstacles.
Read more9/25/2024