Distilling Privileged Information for Dubins Traveling Salesman Problems with Neighborhoods

0

Sign in to get full access
Overview
- This paper presents a novel approach to solving the Dubins Traveling Salesman Problem (DTSP) with Neighborhoods, which is a planning problem where a robot must visit a set of regions of interest while respecting its kinematic constraints.
- The key idea is to use "privileged information" - additional data that is available during training but not at test time - to train a deep neural network that can efficiently solve DTSP instances.
- The proposed method, called Privileged Distillation, outperforms existing approaches on a range of DTSP benchmark problems.
Plain English Explanation
The paper discusses a problem faced by robots or autonomous vehicles that need to visit multiple locations while following specific movement rules. Imagine a robot that needs to inspect several construction sites, but it can only move in certain ways due to its design (e.g., it can only turn in large circles, not make sharp turns). The robot has to find the most efficient route to visit all the sites while obeying these movement constraints.
The researchers developed a new way to train a neural network to solve this kind of problem, called the "Dubins Traveling Salesman Problem with Neighborhoods". The key insight is that during training, the neural network can be given extra information about the optimal route (the "privileged information") that is not available when the network is actually used to plan a route. [This is similar to how a human tutor might give a student extra guidance during lessons that the student can't rely on during a test.]
By using this extra training information, the neural network is able to learn to solve the route planning problem much more effectively than previous methods. When deployed, the trained network can quickly plan efficient routes for the robot or vehicle, without needing the extra guidance it had during training.
Technical Explanation
The paper introduces a new approach called "Privileged Distillation" for solving the Dubins Traveling Salesman Problem with Neighborhoods (DTSPN). DTSPN is a planning problem where a robot or vehicle with kinematic constraints (e.g., minimum turning radius) must visit a set of regions of interest in an efficient manner.
The key innovation is to leverage "privileged information" - additional data about the optimal solution that is available during training but not at test time. Specifically, the authors train a deep neural network to predict both the route and the associated cost, using the privileged information as an additional training signal.
This privileged information can include details like the location of waypoints along the optimal route, the orientation of the vehicle at each waypoint, and the turning radii required. By distilling this extra knowledge into the neural network, the authors show that it can solve DTSPN instances much more effectively than prior methods that do not have access to this privileged information.
The authors evaluate their Privileged Distillation approach on a range of DTSPN benchmark problems and demonstrate significant improvements in solution quality and computational efficiency compared to state-of-the-art techniques. These prior approaches include unsupervised learning methods for the Traveling Salesman Problem, reinforcement learning for related Traveling Purchaser Problems, and interaction-aware planning for autonomous navigation.
Critical Analysis
The paper makes a compelling case for the benefits of leveraging privileged information during training to improve the performance of neural networks on planning problems like DTSPN. By providing the model with additional guidance about the optimal solution, the authors are able to overcome some of the challenges associated with purely data-driven approaches.
However, a potential limitation is the reliance on having access to this privileged information during training. In real-world applications, it may not always be feasible to obtain this level of detailed information about the optimal solution. The authors acknowledge this and suggest that their approach could be extended to use proxy training signals that approximate the privileged information.
Additionally, while the paper demonstrates strong empirical results on benchmark problems, it would be valuable to see further analysis of the generalization capabilities of the Privileged Distillation approach. For example, how well does the trained model perform on DTSPN instances that differ significantly from the training data, in terms of problem size, environment complexity, or robot kinematic constraints? [Insights from related work on the size, hardness, and generalization of unsupervised learning for the Traveling Salesman Problem could be informative here.]
Overall, the paper presents an interesting and promising approach to leveraging privileged information for planning problems, with potential applications in areas like autonomous navigation and robotics. Further research to address the limitations and explore the broader applicability of the method would be valuable.
Conclusion
This paper introduces a novel technique called Privileged Distillation for solving the Dubins Traveling Salesman Problem with Neighborhoods (DTSPN), a planning problem faced by robots and autonomous vehicles with kinematic constraints. The key idea is to use additional "privileged information" about the optimal solution during training to help a deep neural network learn to efficiently plan routes that satisfy the problem's constraints.
The authors demonstrate that their Privileged Distillation approach outperforms existing state-of-the-art methods on DTSPN benchmark problems, in terms of both solution quality and computational efficiency. This work highlights the potential benefits of leveraging privileged information to enhance the performance of data-driven planning algorithms, with implications for a range of robotic and autonomous systems applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Distilling Privileged Information for Dubins Traveling Salesman Problems with Neighborhoods
Min Kyu Shin, Su-Jeong Park, Seung-Keol Ryu, Heeyeon Kim, Han-Lim Choi
This paper presents a novel learning approach for Dubins Traveling Salesman Problems(DTSP) with Neighborhood (DTSPN) to quickly produce a tour of a non-holonomic vehicle passing through neighborhoods of given task points. The method involves two learning phases: initially, a model-free reinforcement learning approach leverages privileged information to distill knowledge from expert trajectories generated by the LinKernighan heuristic (LKH) algorithm. Subsequently, a supervised learning phase trains an adaptation network to solve problems independently of privileged information. Before the first learning phase, a parameter initialization technique using the demonstration data was also devised to enhance training efficiency. The proposed learning method produces a solution about 50 times faster than LKH and substantially outperforms other imitation learning and RL with demonstration schemes, most of which fail to sense all the task points.
Read more4/26/2024
🤷
0
Unsupervised Learning for Solving the Travelling Salesman Problem
Yimeng Min, Yiwei Bai, Carla P. Gomes
We propose UTSP, an unsupervised learning (UL) framework for solving the Travelling Salesman Problem (TSP). We train a Graph Neural Network (GNN) using a surrogate loss. The GNN outputs a heat map representing the probability for each edge to be part of the optimal path. We then apply local search to generate our final prediction based on the heat map. Our loss function consists of two parts: one pushes the model to find the shortest path and the other serves as a surrogate for the constraint that the route should form a Hamiltonian Cycle. Experimental results show that UTSP outperforms the existing data-driven TSP heuristics. Our approach is parameter efficient as well as data efficient: the model takes $sim$ 10% of the number of parameters and $sim$ 0.2% of training samples compared with reinforcement learning or supervised learning methods.
Read more4/11/2024

0
Hierarchical Neural Constructive Solver for Real-world TSP Scenarios
Yong Liang Goh, Zhiguang Cao, Yining Ma, Yanfei Dong, Mohammed Haroon Dupty, Wee Sun Lee
Existing neural constructive solvers for routing problems have predominantly employed transformer architectures, conceptualizing the route construction as a set-to-sequence learning task. However, their efficacy has primarily been demonstrated on entirely random problem instances that inadequately capture real-world scenarios. In this paper, we introduce realistic Traveling Salesman Problem (TSP) scenarios relevant to industrial settings and derive the following insights: (1) The optimal next node (or city) to visit often lies within proximity to the current node, suggesting the potential benefits of biasing choices based on current locations. (2) Effectively solving the TSP requires robust tracking of unvisited nodes and warrants succinct grouping strategies. Building upon these insights, we propose integrating a learnable choice layer inspired by Hypernetworks to prioritize choices based on the current location, and a learnable approximate clustering algorithm inspired by the Expectation-Maximization algorithm to facilitate grouping the unvisited cities. Together, these two contributions form a hierarchical approach towards solving the realistic TSP by considering both immediate local neighbourhoods and learning an intermediate set of node representations. Our hierarchical approach yields superior performance compared to both classical and recent transformer models, showcasing the efficacy of the key designs.
Read more8/9/2024
0
Deep Reinforcement Learning for Traveling Purchaser Problems
Haofeng Yuan, Rongping Zhu, Wanlu Yang, Shiji Song, Keyou You, Wei Fan, C. L. Philip Chen
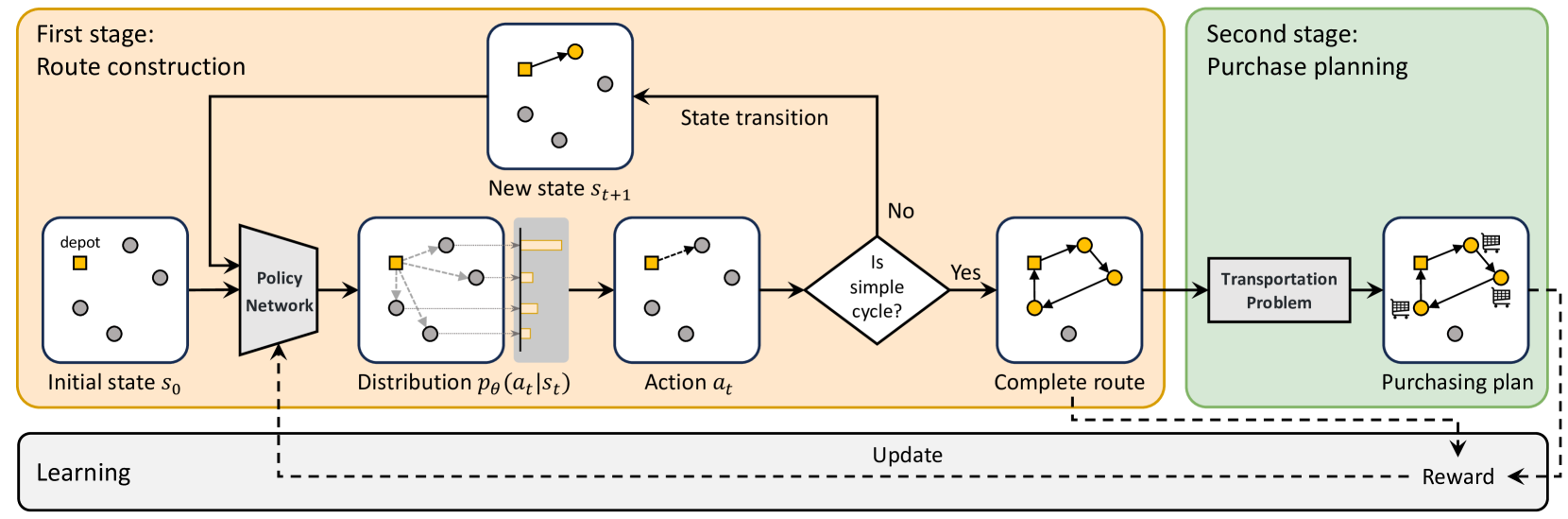
The traveling purchaser problem (TPP) is an important combinatorial optimization problem with broad applications. Due to the coupling between routing and purchasing, existing works on TPPs commonly address route construction and purchase planning simultaneously, which, however, leads to exact methods with high computational cost and heuristics with sophisticated design but limited performance. In sharp contrast, we propose a novel approach based on deep reinforcement learning (DRL), which addresses route construction and purchase planning separately, while evaluating and optimizing the solution from a global perspective. The key components of our approach include a bipartite graph representation for TPPs to capture the market-product relations, and a policy network that extracts information from the bipartite graph and uses it to sequentially construct the route. One significant benefit of our framework is that we can efficiently construct the route using the policy network, and once the route is determined, the associated purchasing plan can be easily derived through linear programming, while, leveraging DRL, we can train the policy network to optimize the global solution objective. Furthermore, by introducing a meta-learning strategy, the policy network can be trained stably on large-sized TPP instances, and generalize well across instances of varying sizes and distributions, even to much larger instances that are never seen during training. Experiments on various synthetic TPP instances and the TPPLIB benchmark demonstrate that our DRL-based approach can significantly outperform well-established TPP heuristics, reducing the optimality gap by 40%-90%, and also showing an advantage in runtime, especially on large-sized instances.
Read more9/10/2024