Do We Run Large-scale Multi-Robot Systems on the Edge? More Evidence for Two-Phase Performance in System Size Scaling

0

Sign in to get full access
Overview
- This paper explores the performance scaling of large-scale multi-robot systems, investigating whether they can be effectively run on edge computing devices.
- The authors present three real-world scenarios to analyze the system size scaling behavior and identify potential performance bottlenecks.
- The findings suggest a two-phase performance pattern, with an initial linear scaling phase followed by a phase of diminishing returns as system size increases.
Plain English Explanation
The paper looks at the challenges of running large-scale multi-robot systems, which involve coordinating and controlling many robots working together. The researchers wanted to see if these systems could be run using "edge" computing devices - that is, small, inexpensive, and distributed computers located close to the robots, rather than a centralized powerful server.
The authors describe three realistic scenarios where large numbers of robots might be used: a warehouse, a search and rescue operation, and a swarm of drones. They analyze how the performance of these systems changes as more robots are added. The key finding is that the performance scales well initially, but then hits a point where adding more robots doesn't provide much additional benefit.
This two-phase performance pattern suggests that there are limits to how large these multi-robot systems can be while still maintaining good performance on edge computing hardware. The researchers hypothesize that communication and coordination challenges start to become bottlenecks as the system size grows.
Technical Explanation
The paper examines the system size scaling behavior of large-scale multi-robot systems, with a focus on whether they can be effectively run on edge computing devices. The authors present three real-world application scenarios to analyze the performance and identify potential bottlenecks:
- Warehouse: A warehouse automation system with hundreds of mobile robots.
- Search and Rescue: A swarm of small robots searching for survivors after a disaster.
- Drone Swarm: A coordinated swarm of drones for environmental monitoring.
Through detailed simulations and modeling, the researchers find evidence of a two-phase performance pattern. Initially, the system performance scales linearly with the number of robots. However, as the system size increases, the authors observe a phase of diminishing returns, where adding more robots provides diminishing improvements in overall performance.
The authors hypothesize that this two-phase behavior is due to increasing communication and coordination challenges as the system size grows. As the number of robots scales up, the computational and networking demands on the edge devices may become a bottleneck, limiting the achievable performance.
These findings have important implications for the design and deployment of large-scale multi-robot systems. They suggest that there may be practical limits to the size of these systems when running on edge computing infrastructure, and that careful system architecture and resource allocation may be required to maintain good performance at scale.
Critical Analysis
The paper provides valuable insights into the challenges of scaling up multi-robot systems, but it also has some limitations that should be considered:
- The simulations and models used in the analysis may not fully capture the complexities of real-world deployment scenarios, where factors like sensor noise, environmental disturbances, and unpredictable robot failures could further impact performance.
- The paper does not explore potential solutions or design approaches that could help overcome the identified bottlenecks and enable more scalable multi-robot systems on edge computing platforms. [Explore approaches like modular and resilient system design, leveraging swarm capabilities, or predicting collective performance.]
- The paper does not address the potential impact of advancements in edge computing hardware, networking, or coordination algorithms, which could shift the performance scaling boundaries identified in the current analysis.
Further research is needed to develop a more comprehensive understanding of the scalability challenges in large-scale multi-robot systems and to explore innovative approaches to address them.
Conclusion
This paper provides valuable insights into the performance scaling of large-scale multi-robot systems, highlighting the potential limitations of running these systems on edge computing platforms. The findings suggest that while there is an initial linear scaling phase, the system performance eventually hits a point of diminishing returns as more robots are added.
The authors' analysis of three real-world scenarios points to communication and coordination challenges as the primary bottlenecks constraining the scalability of these systems. These insights are crucial for the design and deployment of large-scale multi-robot applications, as they suggest the need for careful system architecture and resource allocation to maintain good performance.
Going forward, further research is needed to explore solutions that can help overcome the identified scaling challenges, such as novel coordination algorithms, adaptive resource management, and the integration of more powerful edge computing hardware. By addressing these issues, the full potential of large-scale multi-robot systems can be unlocked, enabling transformative applications in areas like logistics, disaster response, and environmental monitoring.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Do We Run Large-scale Multi-Robot Systems on the Edge? More Evidence for Two-Phase Performance in System Size Scaling
Jonas Kuckling, Robin Luckey, Viktor Avrutin, Andrew Vardy, Andreagiovanni Reina, Heiko Hamann
With increasing numbers of mobile robots arriving in real-world applications, more robots coexist in the same space, interact, and possibly collaborate. Methods to provide such systems with system size scalability are known, for example, from swarm robotics. Example strategies are self-organizing behavior, a strict decentralized approach, and limiting the robot-robot communication. Despite applying such strategies, any multi-robot system breaks above a certain critical system size (i.e., number of robots) as too many robots share a resource (e.g., space, communication channel). We provide additional evidence based on simulations, that at these critical system sizes, the system performance separates into two phases: nearly optimal and minimal performance. We speculate that in real-world applications that are configured for optimal system size, the supposedly high-performing system may actually live on borrowed time as it is on a transient to breakdown. We provide two modeling options (based on queueing theory and a population model) that may help to support this reasoning.
Read more5/15/2024

0
Mixed Reality Environment and High-Dimensional Continuification Control for Swarm Robotics
Gian Carlo Maffettone, Lorenzo Liguori, Eduardo Palermo, Mario di Bernardo, Maurizio Porfiri
Many new methodologies for the control of large-scale multi-agent systems are based on macroscopic representations of the emerging system dynamics, in the form of continuum approximations of large ensembles. These techniques, that are developed in the limit case of an infinite number of agents, are usually validated only through numerical simulations. In this paper, we introduce a mixed reality set-up for testing swarm robotics techniques, focusing on the macroscopic collective motion of robotic swarms. This hybrid apparatus combines both real differential drive robots and virtual agents to create a heterogeneous swarm of tunable size. We also extend continuification-based control methods for swarms to higher dimensions, and assess experimentally their validity in the new platform. Our study demonstrates the effectiveness of the platform for conducting large-scale swarm robotics experiments, and it contributes new theoretical insights into control algorithms exploiting continuification approaches.
Read more7/16/2024
0
Cooperative Task Execution in Multi-Agent Systems
Karishma, Shrisha Rao
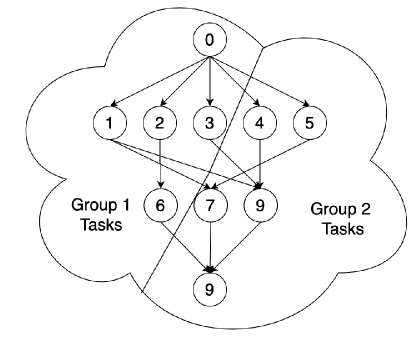
We propose a multi-agent system that enables groups of agents to collaborate and work autonomously to execute tasks. Groups can work in a decentralized manner and can adapt to dynamic changes in the environment. Groups of agents solve assigned tasks by exploring the solution space cooperatively based on the highest reward first. The tasks have a dependency structure associated with them. We rigorously evaluated the performance of the system and the individual group performance using centralized and decentralized control approaches for task distribution. Based on the results, the centralized approach is more efficient for systems with a less-dependent system $G_{18}$ (a well-known program graph that contains $18$ nodes with few links), while the decentralized approach performs better for systems with a highly-dependent system $G_{40}$ (a program graph that contains $40$ highly interlinked nodes). We also evaluated task allocation to groups that do not have interdependence. Our findings reveal that there was significantly less difference in the number of tasks allocated to each group in a less-dependent system than in a highly-dependent one. The experimental results showed that a large number of small-size cooperative groups of agents unequivocally improved the system's performance compared to a small number of large-size cooperative groups of agents. Therefore, it is essential to identify the optimal group size for a system to enhance its performance.
Read more5/21/2024

0
Hierarchies define the scalability of robot swarms
Vivek Shankar Varadharajan, Karthik Soma, Sepand Dyanatkar, Pierre-Yves Lajoie, Giovanni Beltrame
The emerging behaviors of swarms have fascinated scientists and gathered significant interest in the field of robotics. Traditionally, swarms are viewed as egalitarian, with robots sharing identical roles and capabilities. However, recent findings highlight the importance of hierarchy for deploying robot swarms more effectively in diverse scenarios. Despite nature's preference for hierarchies, the robotics field has clung to the egalitarian model, partly due to a lack of empirical evidence for the conditions favoring hierarchies. Our research demonstrates that while egalitarian swarms excel in environments proportionate to their collective sensing abilities, they struggle in larger or more complex settings. Hierarchical swarms, conversely, extend their sensing reach efficiently, proving successful in larger, more unstructured environments with fewer resources. We validated these concepts through simulations and physical robot experiments, using a complex radiation cleanup task. This study paves the way for developing adaptable, hierarchical swarm systems applicable in areas like planetary exploration and autonomous vehicles. Moreover, these insights could deepen our understanding of hierarchical structures in biological organisms.
Read more5/7/2024