Domain-invariant Progressive Knowledge Distillation for UAV-based Object Detection

0

Sign in to get full access
Overview
- UAV-based object detection is important for various applications like surveillance, disaster response, and precision agriculture.
- Existing object detection models often struggle with domain shift, where the training and deployment environments differ.
- This paper proposes a "Domain-invariant Progressive Knowledge Distillation" (DPKD) method to address this challenge.
Plain English Explanation
The paper focuses on improving the performance of object detection models used in UAV (Unmanned Aerial Vehicle) applications. Object detection is the process of identifying and locating objects in an image or video feed. This is crucial for many real-world applications, such as surveillance, disaster response, and precision farming.
One of the key challenges with UAV-based object detection is that the training data and the actual deployment environment can differ significantly. This "domain shift" problem can cause the model to perform poorly when applied to new environments. To address this, the researchers developed a [object Object] method.
The core idea behind DPKD is to train a smaller, more efficient model (called the "student") to mimic the behavior of a larger, more accurate model (called the "teacher"). This process, known as knowledge distillation, allows the student model to learn the essential features and decision-making capabilities of the teacher, without the full complexity of the original model.
The "domain-invariant" and "progressive" aspects of DPKD refer to the way the knowledge is transferred. The method aims to learn features that are robust to changes in the environment, making the student model more adaptable to different deployment scenarios. The progressive nature means that the knowledge is transferred in stages, allowing the student model to gradually improve and become more capable over time.
Technical Explanation
The [object Object] method proposed in this paper consists of several key components:
-
Fast Fourier Transform (FFT)-based Feature Extraction: The researchers use the Fast Fourier Transform (FFT) to extract features from the input images. This helps capture frequency-domain information that can be more robust to domain shifts.
-
Domain-invariant Feature Learning: The model is trained to learn features that are invariant to changes in the environment, such as variations in lighting, background, or camera viewpoint. This is achieved through adversarial training techniques.
-
Progressive Knowledge Distillation: The knowledge from the larger teacher model is distilled into the smaller student model in a progressive manner. This allows the student model to gradually improve its performance and capture the essential features from the teacher.
The paper presents experiments on several UAV-based object detection datasets, comparing the performance of the DPKD method to other state-of-the-art approaches. The results demonstrate that DPKD can effectively address the domain shift problem, leading to improved object detection accuracy in different deployment environments.
Critical Analysis
The paper presents a well-designed and comprehensive approach to addressing the domain shift problem in UAV-based object detection. The use of FFT-based feature extraction and adversarial training for domain-invariant feature learning are interesting and well-motivated techniques.
However, the paper does not provide a detailed analysis of the limitations or potential drawbacks of the DPKD method. For example, it would be valuable to understand the computational complexity and training time requirements of the approach, as well as its performance on more diverse or challenging datasets.
Additionally, the paper could benefit from a discussion of potential real-world deployment challenges, such as the need for robust and efficient inference on resource-constrained UAV platforms, or the impact of sensor degradation or failure on the model's performance.
Overall, the [object Object] method presented in this paper is a promising approach to enhancing the performance and robustness of UAV-based object detection systems. Further research and evaluation in more diverse scenarios would help solidify the method's applicability and limitations.
Conclusion
This paper introduces the [object Object] method, which aims to address the domain shift problem in UAV-based object detection. By leveraging FFT-based feature extraction, adversarial training for domain-invariant learning, and a progressive knowledge distillation approach, the DPKD method can improve the performance and robustness of object detection models when deployed in different environments.
The key contributions of this work are the innovative techniques used to enhance the domain-invariance and transfer of knowledge from a larger teacher model to a smaller student model. This has important implications for developing efficient and reliable UAV-based object detection systems that can be deployed in a wide range of real-world scenarios, from surveillance and disaster response to precision agriculture.
While the paper presents promising results, further research is needed to fully understand the limitations and deployment challenges of the DPKD method. Nonetheless, this work represents an important step forward in addressing a crucial problem in the field of UAV-based computer vision and object detection.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Domain-invariant Progressive Knowledge Distillation for UAV-based Object Detection
Liang Yao, Fan Liu, Chuanyi Zhang, Zhiquan Ou, Ting Wu
Knowledge distillation (KD) is an effective method for compressing models in object detection tasks. Due to limited computational capability, UAV-based object detection (UAV-OD) widely adopt the KD technique to obtain lightweight detectors. Existing methods often overlook the significant differences in feature space caused by the large gap in scale between the teacher and student models. This limitation hampers the efficiency of knowledge transfer during the distillation process. Furthermore, the complex backgrounds in UAV images make it challenging for the student model to efficiently learn the object features. In this paper, we propose a novel knowledge distillation framework for UAV-OD. Specifically, a progressive distillation approach is designed to alleviate the feature gap between teacher and student models. Then a new feature alignment method is provided to extract object-related features for enhancing student model's knowledge reception efficiency. Finally, extensive experiments are conducted to validate the effectiveness of our proposed approach. The results demonstrate that our proposed method achieves state-of-the-art (SoTA) performance in two UAV-OD datasets.
Read more8/22/2024

0
Teaching with Uncertainty: Unleashing the Potential of Knowledge Distillation in Object Detection
Junfei Yi, Jianxu Mao, Tengfei Liu, Mingjie Li, Hanyu Gu, Hui Zhang, Xiaojun Chang, Yaonan Wang
Knowledge distillation (KD) is a widely adopted and effective method for compressing models in object detection tasks. Particularly, feature-based distillation methods have shown remarkable performance. Existing approaches often ignore the uncertainty in the teacher model's knowledge, which stems from data noise and imperfect training. This limits the student model's ability to learn latent knowledge, as it may overly rely on the teacher's imperfect guidance. In this paper, we propose a novel feature-based distillation paradigm with knowledge uncertainty for object detection, termed Uncertainty Estimation-Discriminative Knowledge Extraction-Knowledge Transfer (UET), which can seamlessly integrate with existing distillation methods. By leveraging the Monte Carlo dropout technique, we introduce knowledge uncertainty into the training process of the student model, facilitating deeper exploration of latent knowledge. Our method performs effectively during the KD process without requiring intricate structures or extensive computational resources. Extensive experiments validate the effectiveness of our proposed approach across various distillation strategies, detectors, and backbone architectures. Specifically, following our proposed paradigm, the existing FGD method achieves state-of-the-art (SoTA) performance, with ResNet50-based GFL achieving 44.1% mAP on the COCO dataset, surpassing the baselines by 3.9%.
Read more6/12/2024
0
Task Integration Distillation for Object Detectors
Hai Su, ZhenWen Jian, Songsen Yu
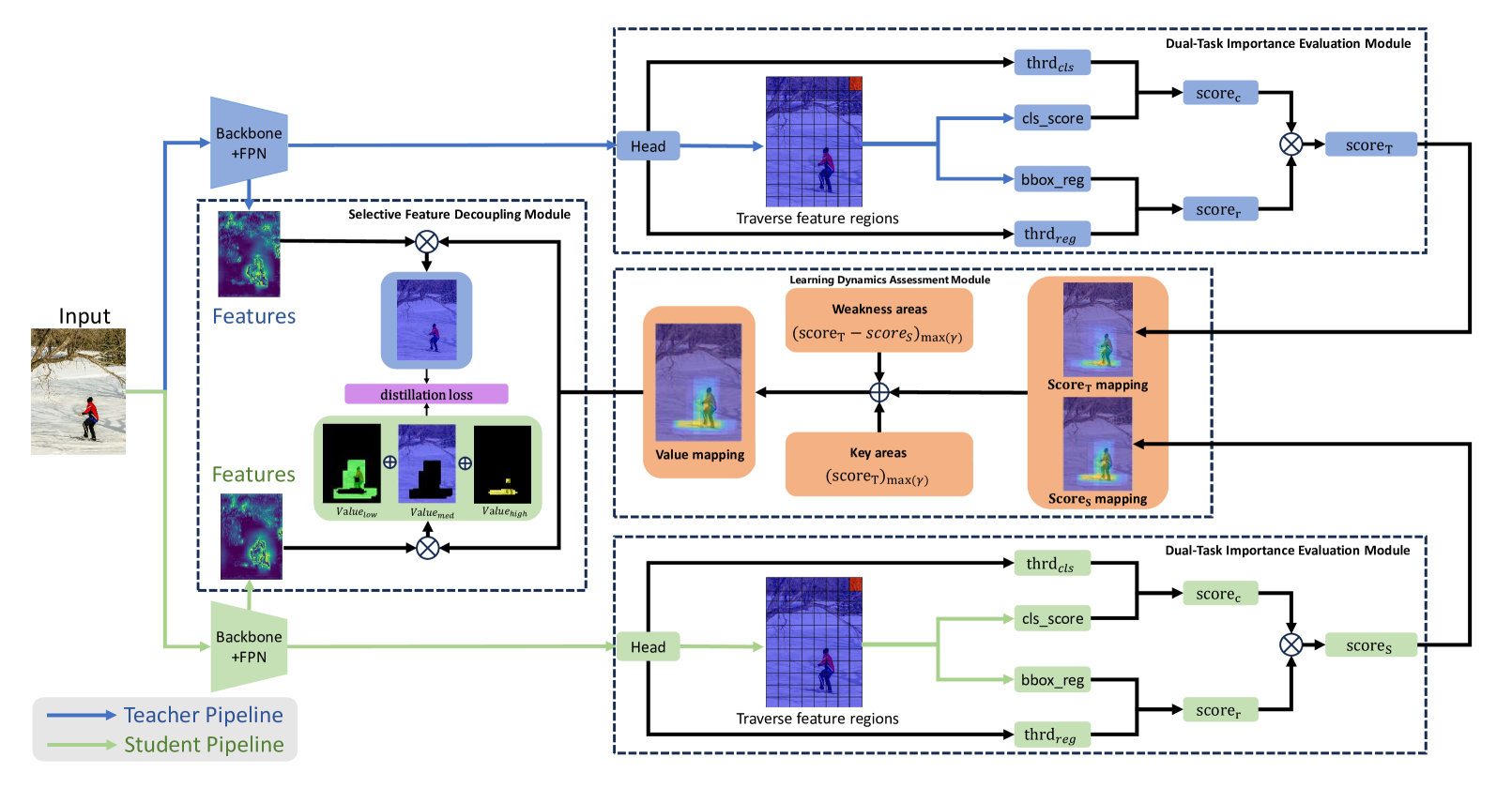
Knowledge distillation is a widely adopted technique for model lightening. However, the performance of most knowledge distillation methods in the domain of object detection is not satisfactory. Typically, knowledge distillation approaches consider only the classification task among the two sub-tasks of an object detector, largely overlooking the regression task. This oversight leads to a partial understanding of the object detector's comprehensive task, resulting in skewed estimations and potentially adverse effects. Therefore, we propose a knowledge distillation method that addresses both the classification and regression tasks, incorporating a task significance strategy. By evaluating the importance of features based on the output of the detector's two sub-tasks, our approach ensures a balanced consideration of both classification and regression tasks in object detection. Drawing inspiration from real-world teaching processes and the definition of learning condition, we introduce a method that focuses on both key and weak areas. By assessing the value of features for knowledge distillation based on their importance differences, we accurately capture the current model's learning situation. This method effectively prevents the issue of biased predictions about the model's learning reality caused by an incomplete utilization of the detector's outputs.
Read more4/3/2024

0
CrossKD: Cross-Head Knowledge Distillation for Object Detection
Jiabao Wang, Yuming Chen, Zhaohui Zheng, Xiang Li, Ming-Ming Cheng, Qibin Hou
Knowledge Distillation (KD) has been validated as an effective model compression technique for learning compact object detectors. Existing state-of-the-art KD methods for object detection are mostly based on feature imitation. In this paper, we present a general and effective prediction mimicking distillation scheme, called CrossKD, which delivers the intermediate features of the student's detection head to the teacher's detection head. The resulting cross-head predictions are then forced to mimic the teacher's predictions. This manner relieves the student's head from receiving contradictory supervision signals from the annotations and the teacher's predictions, greatly improving the student's detection performance. Moreover, as mimicking the teacher's predictions is the target of KD, CrossKD offers more task-oriented information in contrast with feature imitation. On MS COCO, with only prediction mimicking losses applied, our CrossKD boosts the average precision of GFL ResNet-50 with 1x training schedule from 40.2 to 43.7, outperforming all existing KD methods. In addition, our method also works well when distilling detectors with heterogeneous backbones. Code is available at https://github.com/jbwang1997/CrossKD.
Read more4/16/2024