DroneMOT: Drone-based Multi-Object Tracking Considering Detection Difficulties and Simultaneous Moving of Drones and Objects

0

Sign in to get full access
Overview
- This paper presents DroneMOT, a drone-based multi-object tracking system that addresses the challenges of detection difficulties and simultaneous moving of drones and objects.
- The system uses a combination of object detection, multi-object tracking, and drone control algorithms to track multiple moving objects while the drone itself is also in motion.
- The key innovations include robust object detection that can handle occlusions and other challenges, as well as a multi-object tracking approach that can handle dynamic scenarios with both drone and object movement.
Plain English Explanation
The paper describes a system called DroneMOT that uses a drone to track multiple moving objects at the same time. This is a challenging task because the drone itself may be moving, and the objects being tracked can become partially blocked or obscured from the drone's camera.
To address these issues, the DroneMOT system uses advanced computer vision techniques for robust object detection that can still identify objects even when they are partially hidden. It also has a multi-object tracking algorithm that can keep track of multiple objects simultaneously, even as both the drone and the objects are moving around.
The key innovation is that DroneMOT is designed to work in realistic, dynamic scenarios where the drone and the objects it's tracking are all in motion at the same time. This makes it more useful for real-world applications like surveillance, search and rescue, or autonomous vehicle navigation, where the camera platform and the targets are both free to move around independently.
Technical Explanation
The DroneMOT system combines several key components to achieve robust multi-object tracking from a moving drone platform:
-
Object Detection: The system uses a view-centric object detection approach that can handle partial occlusions and other detection challenges. This allows the drone to reliably identify multiple objects of interest despite changes in viewpoint and obstructions.
-
Multi-Object Tracking: DroneMOT employs a multi-object tracking algorithm that can maintain IDs and trajectories for multiple targets simultaneously, even as both the drone and the objects are moving. This is crucial for applications where the camera and targets have independent motion.
-
Drone Control: The system also includes intelligent drone control algorithms that can autonomously adjust the drone's position and orientation to keep the targets in view and maximize tracking performance. This allows the drone to actively maneuver to improve tracking quality.
The authors evaluate DroneMOT on challenging benchmark datasets and demonstrate its ability to outperform existing methods, especially in scenarios with significant occlusions and simultaneous motion of the drone and tracked objects.
Critical Analysis
The DroneMOT system addresses an important and practical problem in the field of multi-object tracking, namely enabling robust tracking from a moving drone platform. The authors have identified key challenges in this domain, such as detection difficulties due to occlusions and the need to handle simultaneous motion of the drone and tracked objects.
While the technical solutions presented in the paper are innovative, the authors acknowledge several limitations and areas for future work. For example, the system currently relies on a predefined object detection model and does not incorporate language guidance to adapt to new object classes or environments. Additionally, the experiments are conducted in simulation, and real-world deployment may introduce additional challenges not accounted for in the study.
Further research could explore ways to make the system more adaptable and generalizable, perhaps through techniques like online learning or few-shot adaptation. Integrating the drone control and tracking components more tightly could also lead to improved performance and robustness.
Overall, the DroneMOT system represents a significant step forward in enabling practical multi-object tracking from drone platforms, but there remains room for continued advancements in this important area of research.
Conclusion
The DroneMOT paper presents a novel system for multi-object tracking from a moving drone platform, addressing key challenges such as detection difficulties and the simultaneous motion of the drone and tracked objects. The system's innovative combination of robust object detection, multi-object tracking, and intelligent drone control algorithms demonstrates promising results and opens up new opportunities for practical applications in areas like surveillance, search and rescue, and autonomous navigation.
While the current implementation has some limitations, the core ideas and technical approaches developed in this work lay the foundation for further advancements in this field. As researchers continue to refine and expand on the DroneMOT system, we can expect to see increasingly capable and versatile drone-based tracking solutions that can operate reliably in complex, dynamic environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
DroneMOT: Drone-based Multi-Object Tracking Considering Detection Difficulties and Simultaneous Moving of Drones and Objects
Peng Wang, Yongcai Wang, Deying Li
Multi-object tracking (MOT) on static platforms, such as by surveillance cameras, has achieved significant progress, with various paradigms providing attractive performances. However, the effectiveness of traditional MOT methods is significantly reduced when it comes to dynamic platforms like drones. This decrease is attributed to the distinctive challenges in the MOT-on-drone scenario: (1) objects are generally small in the image plane, blurred, and frequently occluded, making them challenging to detect and recognize; (2) drones move and see objects from different angles, causing the unreliability of the predicted positions and feature embeddings of the objects. This paper proposes DroneMOT, which firstly proposes a Dual-domain Integrated Attention (DIA) module that considers the fast movements of drones to enhance the drone-based object detection and feature embedding for small-sized, blurred, and occluded objects. Then, an innovative Motion-Driven Association (MDA) scheme is introduced, considering the concurrent movements of both the drone and the objects. Within MDA, an Adaptive Feature Synchronization (AFS) technique is presented to update the object features seen from different angles. Additionally, a Dual Motion-based Prediction (DMP) method is employed to forecast the object positions. Finally, both the refined feature embeddings and the predicted positions are integrated to enhance the object association. Comprehensive evaluations on VisDrone2019-MOT and UAVDT datasets show that DroneMOT provides substantial performance improvements over the state-of-the-art in the domain of MOT on drones.
Read more7/15/2024
0
New!STCMOT: Spatio-Temporal Cohesion Learning for UAV-Based Multiple Object Tracking
Jianbo Ma, Chuanming Tang, Fei Wu, Can Zhao, Jianlin Zhang, Zhiyong Xu
Multiple object tracking (MOT) in Unmanned Aerial Vehicle (UAV) videos is important for diverse applications in computer vision. Current MOT trackers rely on accurate object detection results and precise matching of target reidentification (ReID). These methods focus on optimizing target spatial attributes while overlooking temporal cues in modelling object relationships, especially for challenging tracking conditions such as object deformation and blurring, etc. To address the above-mentioned issues, we propose a novel Spatio-Temporal Cohesion Multiple Object Tracking framework (STCMOT), which utilizes historical embedding features to model the representation of ReID and detection features in a sequential order. Concretely, a temporal embedding boosting module is introduced to enhance the discriminability of individual embedding based on adjacent frame cooperation. While the trajectory embedding is then propagated by a temporal detection refinement module to mine salient target locations in the temporal field. Extensive experiments on the VisDrone2019 and UAVDT datasets demonstrate our STCMOT sets a new state-of-the-art performance in MOTA and IDF1 metrics. The source codes are released at https://github.com/ydhcg-BoBo/STCMOT.
Read more9/18/2024

0
Effective Motion Modeling for UAV-platform Multiple Object Tracking with Re-Margin Loss
Mufeng Yao, Jinlong Peng, Qingdong He, Bo Peng, Hao Chen, Mingmin Chi, Chao Liu, Jon Atli Benediktsson
Multiple object tracking (MOT) from unmanned aerial vehicle (UAV) platforms requires efficient motion modeling. This is because UAV-MOT faces both local object motion and global camera motion. Motion blur also increases the difficulty of detecting large moving objects. Previous UAV motion modeling approaches either focus only on local motion or ignore motion blurring effects, thus limiting their tracking performance and speed. To address these issues, we propose the Motion Mamba Module, which explores both local and global motion features through cross-correlation and bi-directional Mamba Modules for better motion modeling. To address the detection difficulties caused by motion blur, we also design motion margin loss to effectively improve the detection accuracy of motion blurred objects. Based on the Motion Mamba module and motion margin loss, our proposed MM-Tracker surpasses the state-of-the-art in two widely open-source UAV-MOT datasets. Code will be available.
Read more8/20/2024
0
RobMOT: Robust 3D Multi-Object Tracking by Observational Noise and State Estimation Drift Mitigation on LiDAR PointCloud
Mohamed Nagy, Naoufel Werghi, Bilal Hassan, Jorge Dias, Majid Khonji
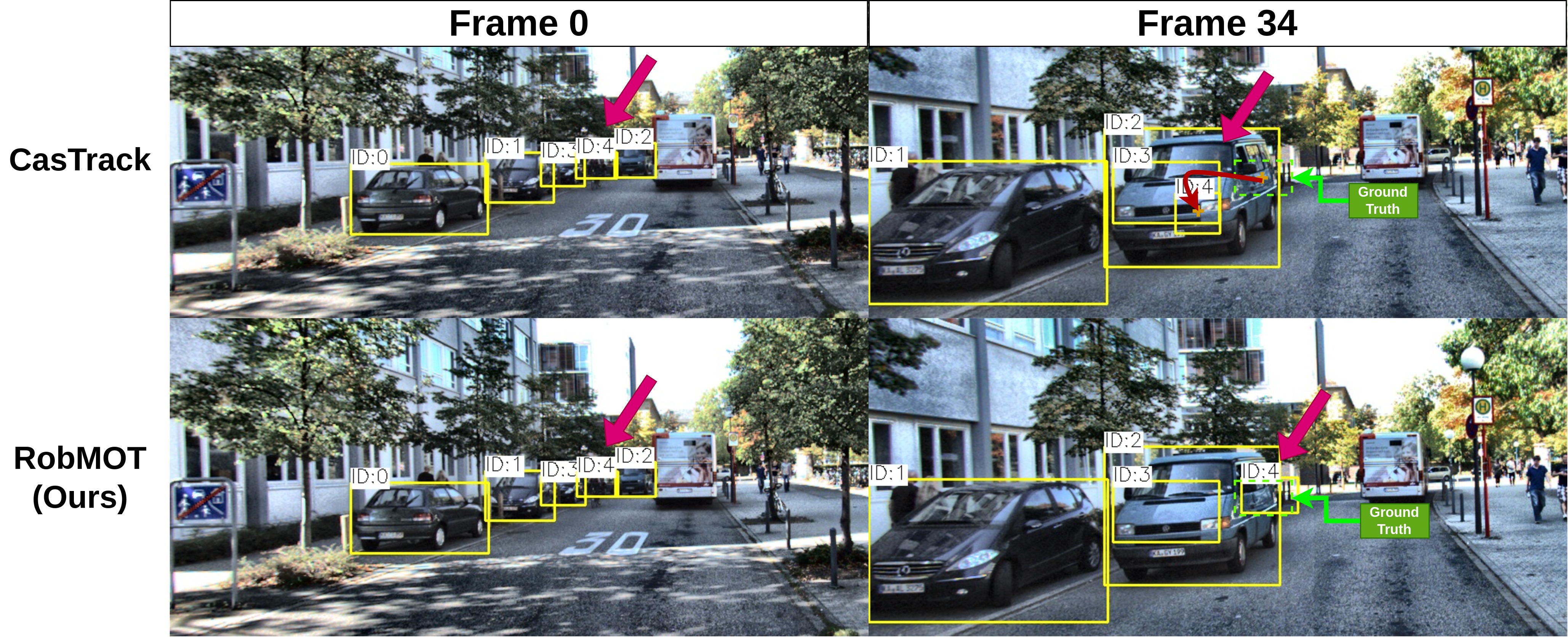
This work addresses limitations in recent 3D tracking-by-detection methods, focusing on identifying legitimate trajectories and addressing state estimation drift in Kalman filters. Current methods rely heavily on threshold-based filtering of false positive detections using detection scores to prevent ghost trajectories. However, this approach is inadequate for distant and partially occluded objects, where detection scores tend to drop, potentially leading to false positives exceeding the threshold. Additionally, the literature generally treats detections as precise localizations of objects. Our research reveals that noise in detections impacts localization information, causing trajectory drift for occluded objects and hindering recovery. To this end, we propose a novel online track validity mechanism that temporally distinguishes between legitimate and ghost tracks, along with a multi-stage observational gating process for incoming observations. This mechanism significantly improves tracking performance, with a $6.28%$ in HOTA and a $17.87%$ increase in MOTA. We also introduce a refinement to the Kalman filter that enhances noise mitigation in trajectory drift, leading to more robust state estimation for occluded objects. Our framework, RobMOT, outperforms state-of-the-art methods, including deep learning approaches, across various detectors, achieving up to a $4%$ margin in HOTA and $6%$ in MOTA. RobMOT excels under challenging conditions, such as prolonged occlusions and tracking distant objects, with up to a 59% improvement in processing latency.
Read more6/21/2024