Effective Motion Modeling for UAV-platform Multiple Object Tracking with Re-Margin Loss

0

Sign in to get full access
Overview
- This paper presents a novel approach for UAV-based multiple object tracking (MOT) that considers effective motion modeling and a new loss function called Re-Margin Loss.
- The proposed method aims to address the challenges of UAV-based MOT, such as the complex motion patterns of objects and the occlusion issues commonly encountered in aerial surveillance.
- The authors demonstrate the effectiveness of their approach through extensive experiments on two UAV-based MOT datasets, showing improved tracking performance compared to state-of-the-art methods.
Plain English Explanation
The paper focuses on improving the performance of tracking multiple objects from a drone (UAV) camera. Tracking objects from a drone can be challenging because the objects can move in complex ways, and they can get blocked from view (occluded) by other objects or the environment. The researchers developed a new way of modeling the motion of the objects and a new loss function called "Re-Margin Loss" to help the tracking system perform better.
The key ideas are:
- Modeling the motion of objects in a more effective way to better capture their complex movement patterns
- Using the new "Re-Margin Loss" function to train the tracking system, which helps it learn to distinguish objects and keep track of them even when they are partially obscured or move in unpredictable ways
The researchers tested their approach on two different datasets of UAV-based multi-object tracking, and they showed that it outperforms other state-of-the-art methods. This work can have important applications in areas like aerial surveillance, autonomous vehicles, and robotics, where the ability to accurately track multiple moving objects from a drone's perspective is crucial.
Technical Explanation
The paper presents a novel approach for UAV-based multiple object tracking (MOT) that focuses on effective motion modeling and a new loss function called Re-Margin Loss.
The authors first propose an Effective Motion Modeling (EMM) module that aims to capture the complex motion patterns of objects in UAV-based MOT scenarios. This module uses a combination of object location, velocity, and acceleration information to better predict the future positions of tracked objects, even in the presence of occlusions or abrupt changes in movement.
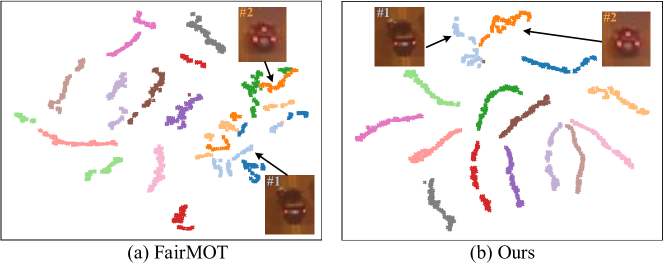
To further improve the tracking performance, the researchers introduce a new loss function called Re-Margin Loss. This loss function encourages the model to learn distinctive features for each object, making it more robust to occlusions and similar-looking objects. The Re-Margin Loss is designed to increase the margin between the feature embeddings of different objects, while also maintaining the compactness of the embeddings for the same object across different frames.
The authors evaluate their proposed approach on two UAV-based MOT datasets, DroneMOT and MotionState, and show that it outperforms state-of-the-art methods in terms of multiple tracking accuracy metrics. The improvements are particularly notable in cases with significant occlusions and complex motion patterns, demonstrating the effectiveness of the Effective Motion Modeling and Re-Margin Loss components.
Critical Analysis
The paper presents a well-designed and thorough investigation into improving UAV-based multi-object tracking. The authors have identified key challenges in this domain, such as the complex motion patterns of objects and occlusion issues, and have proposed innovative solutions to address them.
One potential limitation of the work is that it has only been evaluated on two specific UAV-based MOT datasets. While these datasets are widely used in the field, it would be valuable to see how the proposed approach performs on a more diverse set of scenarios, including different environments, object types, and camera angles. This could help establish the broader applicability and robustness of the method.
Additionally, the paper does not provide a detailed analysis of the computational complexity or real-time performance of the proposed approach. In many UAV-based applications, such as autonomous navigation or surveillance, the ability to perform tracking in a computationally efficient and low-latency manner is crucial. Investigating these aspects could further strengthen the practical relevance of the research.
Overall, the paper presents a promising and technically sound approach to enhancing UAV-based multi-object tracking. The introduction of Effective Motion Modeling and Re-Margin Loss are valuable contributions that could inspire further research in this area, leading to more robust and reliable tracking systems for drone-based applications.
Conclusion
This paper introduces a novel approach for UAV-based multiple object tracking that focuses on effective motion modeling and a new loss function called Re-Margin Loss. The proposed method aims to address the challenges of complex object motion patterns and occlusion issues commonly encountered in aerial surveillance scenarios.
The authors demonstrate the effectiveness of their approach through extensive experiments on two UAV-based MOT datasets, showing improved tracking performance compared to state-of-the-art methods. This work has important implications for a wide range of applications, including autonomous vehicles, robotic systems, and surveillance, where the ability to accurately track multiple moving objects from a drone's perspective is crucial.
The paper presents a technically sound and well-designed solution, but further research could explore the method's performance on a more diverse set of scenarios and investigate its computational efficiency and real-time capabilities. Overall, this work represents a valuable contribution to the field of UAV-based multi-object tracking and could inspire future advancements in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Effective Motion Modeling for UAV-platform Multiple Object Tracking with Re-Margin Loss
Mufeng Yao, Jinlong Peng, Qingdong He, Bo Peng, Hao Chen, Mingmin Chi, Chao Liu, Jon Atli Benediktsson
Multiple object tracking (MOT) from unmanned aerial vehicle (UAV) platforms requires efficient motion modeling. This is because UAV-MOT faces both local object motion and global camera motion. Motion blur also increases the difficulty of detecting large moving objects. Previous UAV motion modeling approaches either focus only on local motion or ignore motion blurring effects, thus limiting their tracking performance and speed. To address these issues, we propose the Motion Mamba Module, which explores both local and global motion features through cross-correlation and bi-directional Mamba Modules for better motion modeling. To address the detection difficulties caused by motion blur, we also design motion margin loss to effectively improve the detection accuracy of motion blurred objects. Based on the Motion Mamba module and motion margin loss, our proposed MM-Tracker surpasses the state-of-the-art in two widely open-source UAV-MOT datasets. Code will be available.
Read more8/20/2024

0
DroneMOT: Drone-based Multi-Object Tracking Considering Detection Difficulties and Simultaneous Moving of Drones and Objects
Peng Wang, Yongcai Wang, Deying Li
Multi-object tracking (MOT) on static platforms, such as by surveillance cameras, has achieved significant progress, with various paradigms providing attractive performances. However, the effectiveness of traditional MOT methods is significantly reduced when it comes to dynamic platforms like drones. This decrease is attributed to the distinctive challenges in the MOT-on-drone scenario: (1) objects are generally small in the image plane, blurred, and frequently occluded, making them challenging to detect and recognize; (2) drones move and see objects from different angles, causing the unreliability of the predicted positions and feature embeddings of the objects. This paper proposes DroneMOT, which firstly proposes a Dual-domain Integrated Attention (DIA) module that considers the fast movements of drones to enhance the drone-based object detection and feature embedding for small-sized, blurred, and occluded objects. Then, an innovative Motion-Driven Association (MDA) scheme is introduced, considering the concurrent movements of both the drone and the objects. Within MDA, an Adaptive Feature Synchronization (AFS) technique is presented to update the object features seen from different angles. Additionally, a Dual Motion-based Prediction (DMP) method is employed to forecast the object positions. Finally, both the refined feature embeddings and the predicted positions are integrated to enhance the object association. Comprehensive evaluations on VisDrone2019-MOT and UAVDT datasets show that DroneMOT provides substantial performance improvements over the state-of-the-art in the domain of MOT on drones.
Read more7/15/2024
0
STCMOT: Spatio-Temporal Cohesion Learning for UAV-Based Multiple Object Tracking
Jianbo Ma, Chuanming Tang, Fei Wu, Can Zhao, Jianlin Zhang, Zhiyong Xu
Multiple object tracking (MOT) in Unmanned Aerial Vehicle (UAV) videos is important for diverse applications in computer vision. Current MOT trackers rely on accurate object detection results and precise matching of target reidentification (ReID). These methods focus on optimizing target spatial attributes while overlooking temporal cues in modelling object relationships, especially for challenging tracking conditions such as object deformation and blurring, etc. To address the above-mentioned issues, we propose a novel Spatio-Temporal Cohesion Multiple Object Tracking framework (STCMOT), which utilizes historical embedding features to model the representation of ReID and detection features in a sequential order. Concretely, a temporal embedding boosting module is introduced to enhance the discriminability of individual embedding based on adjacent frame cooperation. While the trajectory embedding is then propagated by a temporal detection refinement module to mine salient target locations in the temporal field. Extensive experiments on the VisDrone2019 and UAVDT datasets demonstrate our STCMOT sets a new state-of-the-art performance in MOTA and IDF1 metrics. The source codes are released at https://github.com/ydhcg-BoBo/STCMOT.
Read more9/18/2024

0
View-Centric Multi-Object Tracking with Homographic Matching in Moving UAV
Deyi Ji, Siqi Gao, Lanyun Zhu, Qi Zhu, Yiru Zhao, Peng Xu, Hongtao Lu, Feng Zhao, Jieping Ye
In this paper, we address the challenge of multi-object tracking (MOT) in moving Unmanned Aerial Vehicle (UAV) scenarios, where irregular flight trajectories, such as hovering, turning left/right, and moving up/down, lead to significantly greater complexity compared to fixed-camera MOT. Specifically, changes in the scene background not only render traditional frame-to-frame object IOU association methods ineffective but also introduce significant view shifts in the objects, which complicates tracking. To overcome these issues, we propose a novel universal HomView-MOT framework, which for the first time, harnesses the view Homography inherent in changing scenes to solve MOT challenges in moving environments, incorporating Homographic Matching and View-Centric concepts. We introduce a Fast Homography Estimation (FHE) algorithm for rapid computation of Homography matrices between video frames, enabling object View-Centric ID Learning (VCIL) and leveraging multi-view Homography to learn cross-view ID features. Concurrently, our Homographic Matching Filter (HMF) maps object bounding boxes from different frames onto a common view plane for a more realistic physical IOU association. Extensive experiments have proven that these innovations allow HomView-MOT to achieve state-of-the-art performance on prominent UAV MOT datasets VisDrone and UAVDT.
Read more5/15/2024