Dynamic 3D Gaussian Fields for Urban Areas
2406.03175
0
0

Abstract
We present an efficient neural 3D scene representation for novel-view synthesis (NVS) in large-scale, dynamic urban areas. Existing works are not well suited for applications like mixed-reality or closed-loop simulation due to their limited visual quality and non-interactive rendering speeds. Recently, rasterization-based approaches have achieved high-quality NVS at impressive speeds. However, these methods are limited to small-scale, homogeneous data, i.e. they cannot handle severe appearance and geometry variations due to weather, season, and lighting and do not scale to larger, dynamic areas with thousands of images. We propose 4DGF, a neural scene representation that scales to large-scale dynamic urban areas, handles heterogeneous input data, and substantially improves rendering speeds. We use 3D Gaussians as an efficient geometry scaffold while relying on neural fields as a compact and flexible appearance model. We integrate scene dynamics via a scene graph at global scale while modeling articulated motions on a local level via deformations. This decomposed approach enables flexible scene composition suitable for real-world applications. In experiments, we surpass the state-of-the-art by over 3 dB in PSNR and more than 200 times in rendering speed.
Create account to get full access
Overview
- The paper presents a method for generating dynamic 3D Gaussian fields to model urban areas.
- This technique aims to capture the complex and ever-changing nature of urban environments, which is crucial for applications like autonomous driving and urban planning.
- The proposed approach builds on prior work on refined 3D Gaussian representation, dynamic 3D Gaussians distillation, and efficient 3D Gaussian representation.
Plain English Explanation
The paper introduces a new way to model the 3D structure of cities and towns. Urban areas are constantly changing, with buildings, roads, and other elements constantly shifting. Traditional 3D models struggle to capture this dynamic nature. The proposed method uses a special type of 3D model called a "Gaussian field" to better represent the ever-evolving urban landscape.
Gaussian fields are mathematical descriptions of 3D shapes that can adapt and change over time. This allows the model to more accurately reflect the real-world complexity of a city, where new construction, road closures, and other changes are happening all the time. The authors build on previous work that has explored using 3D Gaussian representations and distilling dynamic 3D Gaussian information to create their dynamic 3D Gaussian field approach.
The key advantage of this technique is that it can generate 3D models of urban areas that are more realistic and up-to-date compared to static 3D maps. This could be very useful for applications like self-driving cars, which need an accurate and constantly updated understanding of the road network and surrounding environment. It could also aid urban planners in visualizing and analyzing how a city is changing over time.
Technical Explanation
The paper proposes a method for generating dynamic 3D Gaussian fields to model urban areas. This builds on prior work on refined 3D Gaussian representation, dynamic 3D Gaussians distillation, and efficient 3D Gaussian representation.
The key idea is to represent the 3D structure of an urban environment using a Gaussian field, where each element in the 3D space is described by a Gaussian distribution. This allows the model to capture not just the mean 3D shape, but also the uncertainty and variability in the environment.
To make the Gaussian field dynamic, the authors propose learning parameters that govern how the field evolves over time. This enables the model to adapt and change to reflect the constant updates and alterations happening in a real city.
The paper outlines the mathematical formulation for the dynamic 3D Gaussian field, including the parameterization of the Gaussian distributions and the dynamic transition function. It also describes the training procedure, which involves optimizing the model parameters to fit observed 3D data of urban environments.
Experimental results on several urban datasets demonstrate the effectiveness of the proposed approach in generating high-quality 3D models that faithfully capture the complex and ever-changing nature of cities. The dynamic 3D Gaussian fields outperform static 3D representations in terms of reconstruction accuracy and ability to adapt to changes.
Critical Analysis
The paper presents a promising approach for modeling the dynamic 3D structure of urban environments. The use of Gaussian fields to represent 3D shape and uncertainty is a well-established technique, and the authors build on this foundation to develop a dynamic version that can adapt over time.
One potential limitation is the computational complexity of the dynamic Gaussian field model, which may limit its scalability to very large-scale urban environments. The paper does not provide a detailed analysis of the runtime or memory requirements of the approach.
Additionally, the paper focuses primarily on the technical details of the model and its performance on benchmark datasets. It would be valuable to see more discussion of real-world applications and the practical benefits of this technology, such as how it could improve autonomous driving, urban planning, or other use cases.
While the authors demonstrate the effectiveness of their approach, they do not explore the potential biases or failure modes of the dynamic 3D Gaussian field model. It would be important to understand the types of urban changes or scenarios that the model may struggle with, and how these limitations could be addressed in future research.
Overall, the paper makes a valuable contribution to the field of 3D urban modeling by introducing a dynamic representation that can better capture the evolving nature of cities. Further exploration of the practical implications and potential limitations of this technology could help drive its adoption and refinement.
Conclusion
This paper presents a novel method for generating dynamic 3D Gaussian fields to model urban environments. By representing the 3D structure of a city using a Gaussian field that can evolve over time, the approach is able to more accurately capture the constantly changing nature of urban areas.
The dynamic 3D Gaussian field model builds on previous work in 3D Gaussian representations, distillation, and efficient modeling. Experiments demonstrate that this technique outperforms static 3D models in terms of reconstruction accuracy and adaptability to changes.
While the paper focuses primarily on the technical details of the approach, the potential applications are significant. Dynamic 3D urban models could greatly benefit autonomous driving systems, which require an up-to-date understanding of the road network and surrounding environment. Urban planners could also leverage this technology to visualize and analyze how cities are evolving over time.
Overall, this research represents an important step forward in the field of 3D urban modeling, providing a more flexible and realistic representation that can better keep pace with the dynamic reality of cities and towns.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
A Refined 3D Gaussian Representation for High-Quality Dynamic Scene Reconstruction
Bin Zhang, Bi Zeng, Zexin Peng
0
0
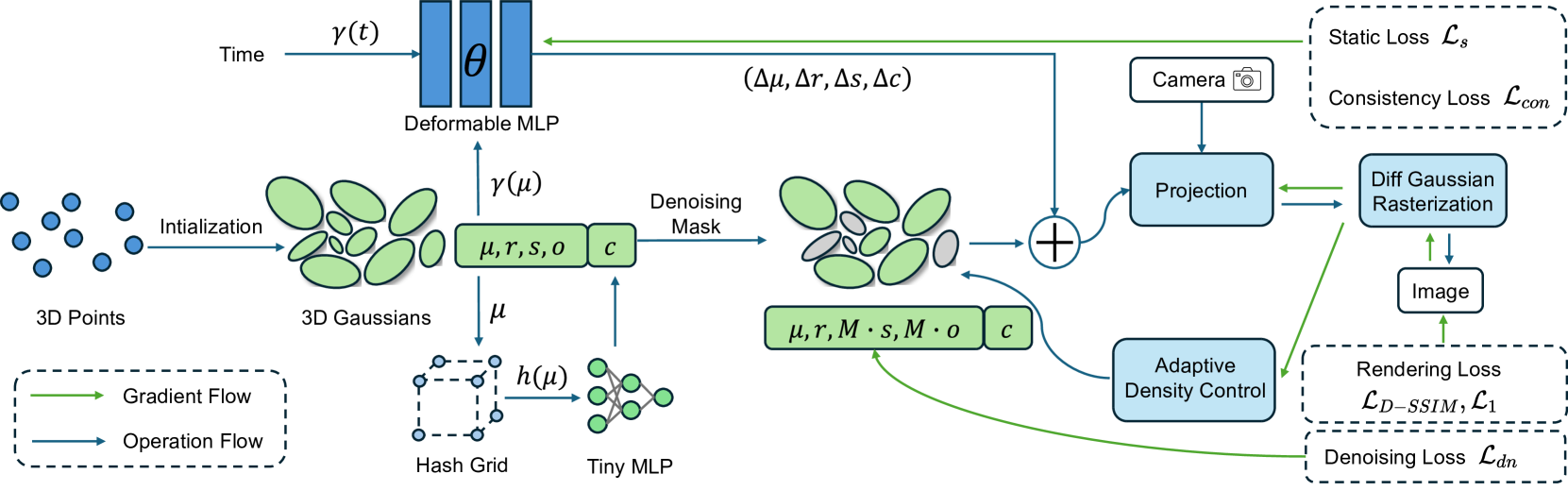
In recent years, Neural Radiance Fields (NeRF) has revolutionized three-dimensional (3D) reconstruction with its implicit representation. Building upon NeRF, 3D Gaussian Splatting (3D-GS) has departed from the implicit representation of neural networks and instead directly represents scenes as point clouds with Gaussian-shaped distributions. While this shift has notably elevated the rendering quality and speed of radiance fields but inevitably led to a significant increase in memory usage. Additionally, effectively rendering dynamic scenes in 3D-GS has emerged as a pressing challenge. To address these concerns, this paper purposes a refined 3D Gaussian representation for high-quality dynamic scene reconstruction. Firstly, we use a deformable multi-layer perceptron (MLP) network to capture the dynamic offset of Gaussian points and express the color features of points through hash encoding and a tiny MLP to reduce storage requirements. Subsequently, we introduce a learnable denoising mask coupled with denoising loss to eliminate noise points from the scene, thereby further compressing 3D Gaussian model. Finally, motion noise of points is mitigated through static constraints and motion consistency constraints. Experimental results demonstrate that our method surpasses existing approaches in rendering quality and speed, while significantly reducing the memory usage associated with 3D-GS, making it highly suitable for various tasks such as novel view synthesis, and dynamic mapping.
5/29/2024

$textit{S}^3$Gaussian: Self-Supervised Street Gaussians for Autonomous Driving
Nan Huang, Xiaobao Wei, Wenzhao Zheng, Pengju An, Ming Lu, Wei Zhan, Masayoshi Tomizuka, Kurt Keutzer, Shanghang Zhang
0
0
Photorealistic 3D reconstruction of street scenes is a critical technique for developing real-world simulators for autonomous driving. Despite the efficacy of Neural Radiance Fields (NeRF) for driving scenes, 3D Gaussian Splatting (3DGS) emerges as a promising direction due to its faster speed and more explicit representation. However, most existing street 3DGS methods require tracked 3D vehicle bounding boxes to decompose the static and dynamic elements for effective reconstruction, limiting their applications for in-the-wild scenarios. To facilitate efficient 3D scene reconstruction without costly annotations, we propose a self-supervised street Gaussian ($textit{S}^3$Gaussian) method to decompose dynamic and static elements from 4D consistency. We represent each scene with 3D Gaussians to preserve the explicitness and further accompany them with a spatial-temporal field network to compactly model the 4D dynamics. We conduct extensive experiments on the challenging Waymo-Open dataset to evaluate the effectiveness of our method. Our $textit{S}^3$Gaussian demonstrates the ability to decompose static and dynamic scenes and achieves the best performance without using 3D annotations. Code is available at: https://github.com/nnanhuang/S3Gaussian/.
5/31/2024
DGD: Dynamic 3D Gaussians Distillation
Isaac Labe, Noam Issachar, Itai Lang, Sagie Benaim
0
0
We tackle the task of learning dynamic 3D semantic radiance fields given a single monocular video as input. Our learned semantic radiance field captures per-point semantics as well as color and geometric properties for a dynamic 3D scene, enabling the generation of novel views and their corresponding semantics. This enables the segmentation and tracking of a diverse set of 3D semantic entities, specified using a simple and intuitive interface that includes a user click or a text prompt. To this end, we present DGD, a unified 3D representation for both the appearance and semantics of a dynamic 3D scene, building upon the recently proposed dynamic 3D Gaussians representation. Our representation is optimized over time with both color and semantic information. Key to our method is the joint optimization of the appearance and semantic attributes, which jointly affect the geometric properties of the scene. We evaluate our approach in its ability to enable dense semantic 3D object tracking and demonstrate high-quality results that are fast to render, for a diverse set of scenes. Our project webpage is available on https://isaaclabe.github.io/DGD-Website/
5/30/2024
WE-GS: An In-the-wild Efficient 3D Gaussian Representation for Unconstrained Photo Collections
Yuze Wang, Junyi Wang, Yue Qi
0
0
Novel View Synthesis (NVS) from unconstrained photo collections is challenging in computer graphics. Recently, 3D Gaussian Splatting (3DGS) has shown promise for photorealistic and real-time NVS of static scenes. Building on 3DGS, we propose an efficient point-based differentiable rendering framework for scene reconstruction from photo collections. Our key innovation is a residual-based spherical harmonic coefficients transfer module that adapts 3DGS to varying lighting conditions and photometric post-processing. This lightweight module can be pre-computed and ensures efficient gradient propagation from rendered images to 3D Gaussian attributes. Additionally, we observe that the appearance encoder and the transient mask predictor, the two most critical parts of NVS from unconstrained photo collections, can be mutually beneficial. We introduce a plug-and-play lightweight spatial attention module to simultaneously predict transient occluders and latent appearance representation for each image. After training and preprocessing, our method aligns with the standard 3DGS format and rendering pipeline, facilitating seamlessly integration into various 3DGS applications. Extensive experiments on diverse datasets show our approach outperforms existing approaches on the rendering quality of novel view and appearance synthesis with high converge and rendering speed.
6/5/2024