Dynamic Fairness Perceptions in Human-Robot Interaction

0

Sign in to get full access
Overview
- Examines how human perceptions of fairness in human-robot interactions can change over time
- Focuses on a resource allocation scenario where a robot makes decisions about distributing resources
- Explores how factors like robot behavior and performance impact fairness judgments
Plain English Explanation
This research explores how people's views on the fairness of a robot's decisions can evolve as they interact with the robot over time. The researchers looked at a scenario where a robot was tasked with distributing limited resources, like money or supplies, among a group of people.
They found that the robot's behavior and performance played a big role in how people judged the fairness of its decisions. For example, if the robot made consistent and logical choices, people were more likely to see the process as fair, even if they didn't agree with the specific outcomes. However, if the robot's decisions seemed erratic or biased, people's perceptions of fairness declined over time.
Importantly, the researchers also discovered that people's initial impressions of fairness could change significantly after repeated interactions with the robot. Someone who thought the robot was being fair at first might later decide its actions were unfair, or vice versa. This suggests that fairness judgments in human-robot interactions are not static, but can evolve as people gain more experience with the system.
Technical Explanation
The paper describes a series of experiments where participants interacted with a simulated robot tasked with allocating resources among a group of people. The researchers manipulated factors like the robot's decision-making consistency, transparency, and performance to see how they impacted participants' perceptions of fairness over multiple rounds of interactions.
The results showed that participants initially judged the robot's resource allocation to be more fair when its decisions were consistent and explicable, even if they didn't agree with the specific outcomes. However, these positive fairness perceptions tended to decline over time if the robot exhibited biased or erratic behavior.
Interestingly, the researchers also found that participants' fairness judgments were not static, but could change significantly after repeated interactions with the robot. Someone who initially viewed the robot's actions as fair might later decide they were unfair, or vice versa. This suggests that people's assessments of fairness in human-robot interactions are dynamic and can evolve based on their cumulative experiences.
The authors argue these findings highlight the importance of designing robots that can maintain consistent and transparent decision-making processes to preserve long-term perceptions of fairness. They also note the need for further research to explore how other factors, like the context of the interaction or individual differences among users, might influence fairness judgments in human-robot scenarios.
Critical Analysis
The paper provides valuable insights into the complex and dynamic nature of fairness perceptions in human-robot interactions. By examining how factors like robot behavior and performance can influence fairness judgments over time, the researchers offer important considerations for the design of fair and trustworthy AI systems.
One key strength of the study is its experimental approach, which allowed the researchers to isolate and manipulate specific variables to better understand their impact. The focus on a resource allocation scenario also represents a common real-world application where perceptions of fairness are likely to be highly relevant.
However, the study is limited in its scope, as it only examined a single type of interaction in a controlled lab setting. Additional research would be needed to understand how these findings might translate to more complex, real-world human-robot interactions, where other contextual factors could come into play.
The paper also does not delve deeply into the potential reasons why people's fairness judgments might change over time. Further investigation into the cognitive and emotional processes underlying these dynamic perceptions could provide valuable insights for designing robots that can maintain positive long-term relationships with human users.
Overall, this study represents an important step in understanding the nuances of fairness in human-robot interaction. By highlighting the need to consider the evolving nature of fairness perceptions, the researchers underscore the challenges and opportunities in creating AI systems that are not only fair in the moment, but also perceived as fair by the people they interact with over time.
Conclusion
This research paper offers valuable insights into the dynamic nature of fairness perceptions in human-robot interactions. The key finding is that people's judgments of a robot's fairness can change significantly over the course of repeated interactions, based on factors like the robot's decision-making consistency and performance.
These results have important implications for the design of fair and trustworthy AI systems, suggesting that maintaining positive long-term perceptions of fairness may require more than just ensuring fair outcomes in the moment. Robots must also be designed to exhibit transparent and consistent behavior that can preserve people's trust and confidence in the system over time.
While this study is limited in scope, it represents an important step in understanding the complex interplay between human users and AI agents. By continuing to explore the nuances of fairness in these interactions, researchers and designers can work towards creating AI systems that are not only technically fair, but also perceived as such by the people they interact with.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Dynamic Fairness Perceptions in Human-Robot Interaction
Houston Claure, Kate Candon, Inyoung Shin, Marynel V'azquez
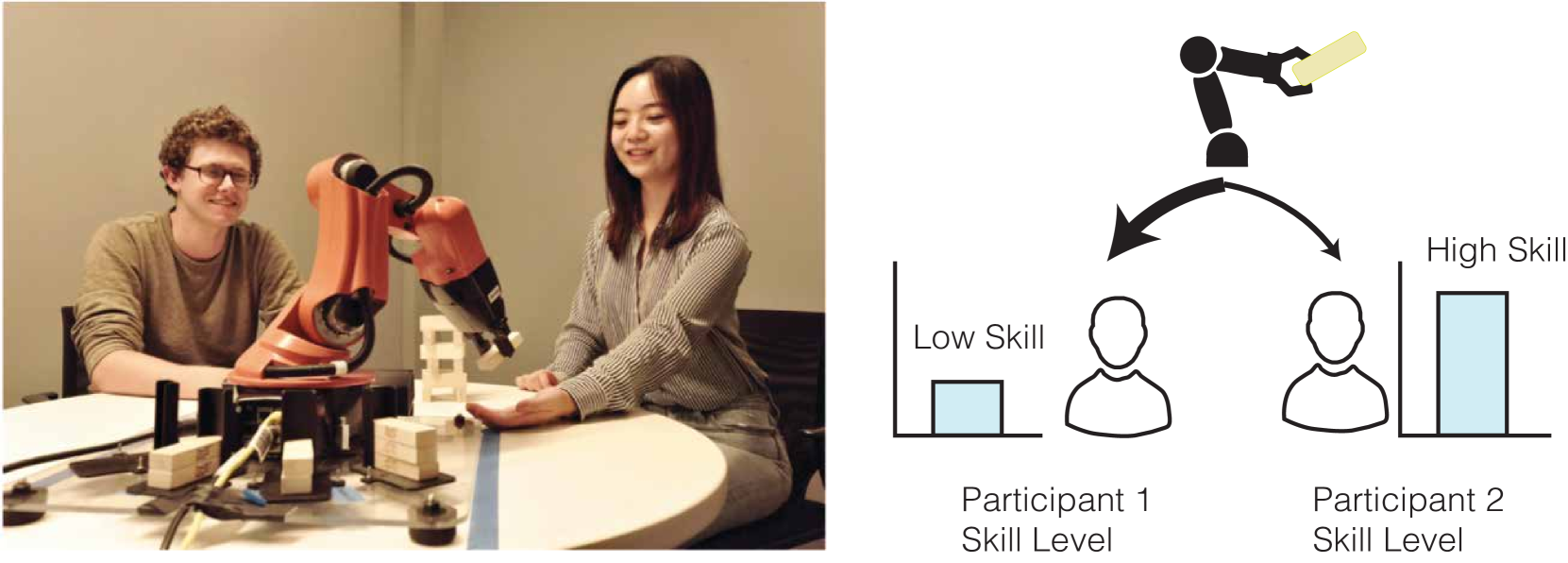
People deeply care about how fairly they are treated by robots. The established paradigm for probing fairness in Human-Robot Interaction (HRI) involves measuring the perception of the fairness of a robot at the conclusion of an interaction. However, such an approach is limited as interactions vary over time, potentially causing changes in fairness perceptions as well. To validate this idea, we conducted a 2x2 user study with a mixed design (N=40) where we investigated two factors: the timing of unfair robot actions (early or late in an interaction) and the beneficiary of those actions (either another robot or the participant). Our results show that fairness judgments are not static. They can shift based on the timing of unfair robot actions. Further, we explored using perceptions of three key factors (reduced welfare, conduct, and moral transgression) proposed by a Fairness Theory from Organizational Justice to predict momentary perceptions of fairness in our study. Interestingly, we found that the reduced welfare and moral transgression factors were better predictors than all factors together. Our findings reinforce the idea that unfair robot behavior can shape perceptions of group dynamics and trust towards a robot and pave the path to future research directions on moment-to-moment fairness perceptions
Read more9/14/2024
0
Designing for Fairness in Human-Robot Interactions
Houston Claure
The foundation of successful human collaboration is deeply rooted in the principles of fairness. As robots are increasingly prevalent in various parts of society where they are working alongside groups and teams of humans, their ability to understand and act according to principles of fairness becomes crucial for their effective integration. This is especially critical when robots are part of multi-human teams, where they must make continuous decisions regarding the allocation of resources. These resources can be material, such as tools, or communicative, such as gaze direction, and must be distributed fairly among team members to ensure optimal team performance and healthy group dynamics. Therefore, our research focuses on understanding how robots can effectively participate within human groups by making fair decisions while contributing positively to group dynamics and outcomes. In this paper, I discuss advances toward ensuring that robots are capable of considering human notions of fairness in their decision-making.
Read more6/3/2024

0
Human Reactions to Incorrect Answers from Robots
Ponkoj Chandra Shill, Md. Azizul Hakim, Muhammad Jahanzeb Khan, Bashira Akter Anima
As robots grow more and more integrated into numerous industries, it is critical to comprehend how humans respond to their failures. This paper systematically studies how trust dynamics and system design are affected by human responses to robot failures. The three-stage survey used in the study provides a thorough understanding of human-robot interactions. While the second stage concentrates on interaction details, such as robot precision and error acknowledgment, the first stage collects demographic data and initial levels of trust. In the last phase, participants' perceptions are examined after the encounter, and trust dynamics, forgiveness, and propensity to suggest robotic technologies are evaluated. Results show that participants' trust in robotic technologies increased significantly when robots acknowledged their errors or limitations to participants and their willingness to suggest robots for activities in the future points to a favorable change in perception, emphasizing the role that direct engagement has in influencing trust dynamics. By providing useful advice for creating more sympathetic, responsive, and reliable robotic systems, the study advances the science of human-robot interaction and promotes a wider adoption of robotic technologies.
Read more7/8/2024
📊
0
Warmth and competence in human-agent cooperation
Kevin R. McKee, Xuechunzi Bai, Susan T. Fiske
Interaction and cooperation with humans are overarching aspirations of artificial intelligence (AI) research. Recent studies demonstrate that AI agents trained with deep reinforcement learning are capable of collaborating with humans. These studies primarily evaluate human compatibility through objective metrics such as task performance, obscuring potential variation in the levels of trust and subjective preference that different agents garner. To better understand the factors shaping subjective preferences in human-agent cooperation, we train deep reinforcement learning agents in Coins, a two-player social dilemma. We recruit $N = 501$ participants for a human-agent cooperation study and measure their impressions of the agents they encounter. Participants' perceptions of warmth and competence predict their stated preferences for different agents, above and beyond objective performance metrics. Drawing inspiration from social science and biology research, we subsequently implement a new ``partner choice'' framework to elicit revealed preferences: after playing an episode with an agent, participants are asked whether they would like to play the next episode with the same agent or to play alone. As with stated preferences, social perception better predicts participants' revealed preferences than does objective performance. Given these results, we recommend human-agent interaction researchers routinely incorporate the measurement of social perception and subjective preferences into their studies.
Read more5/10/2024