Designing for Fairness in Human-Robot Interactions

0
Sign in to get full access
Introduction & Motivation
This paper explores the critical issue of ensuring fairness in human-robot interactions. As robots become increasingly integrated into our daily lives, it is essential that they interact with humans in an equitable and unbiased manner. The authors highlight the need to proactively address fairness concerns, as robots can potentially amplify and perpetuate societal biases if not designed thoughtfully.
Prior Work
Designing for Fairness in Human-Robot Interactions
The paper reviews prior research on designing fair and ethical human-robot interactions. This includes work on legible and proactive robot planning for prosocial behavior, learning efficient and fair policies under uncertainty, and general surveys on fairness in reinforcement learning. The authors note that while these approaches provide important foundations, more research is needed to fully address the nuances of fairness in real-world human-robot interactions.
Plain English Explanation
The paper focuses on ensuring that robots treat humans fairly as they become more common in our daily lives. Robots have the potential to perpetuate societal biases if they are not designed carefully. The authors review prior work on making robot behavior more transparent, learning fair policies even when there is uncertainty, and general principles of fairness in machine learning. However, they argue that more research is still needed to fully address the challenge of building fair human-robot interactions.
Technical Explanation
The paper provides an overview of prior work relevant to designing fair human-robot interactions. This includes research on legible and proactive robot planning, which aims to make robot behavior more interpretable and aligned with human values. It also covers work on learning efficient and fair policies under uncertainty in collaborative human-robot settings, as well as broader surveys on fairness in reinforcement learning. The authors note that while these provide important foundations, more research is needed to address the nuances of fairness in real-world human-robot interactions.
Critical Analysis
The paper acknowledges several key limitations and areas for future research. It notes that the prior work reviewed primarily focuses on fairness at the individual level, whereas group-level fairness in human-robot interactions also needs to be considered. The authors also highlight the challenge of defining and measuring fairness in complex, context-dependent human-robot interactions. Finally, they suggest that more work is needed to understand how different aspects of fairness, such as procedural and distributive fairness, should be balanced and prioritized.
Conclusion
This paper underscores the critical importance of designing fair and equitable human-robot interactions as robots become more prevalent in our lives. While prior research provides a valuable foundation, the authors argue that significant further work is needed to fully address the nuances of fairness in this domain. Continued progress in this area will be essential for ensuring that the benefits of human-robot collaboration are distributed fairly across all members of society.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Designing for Fairness in Human-Robot Interactions
Houston Claure
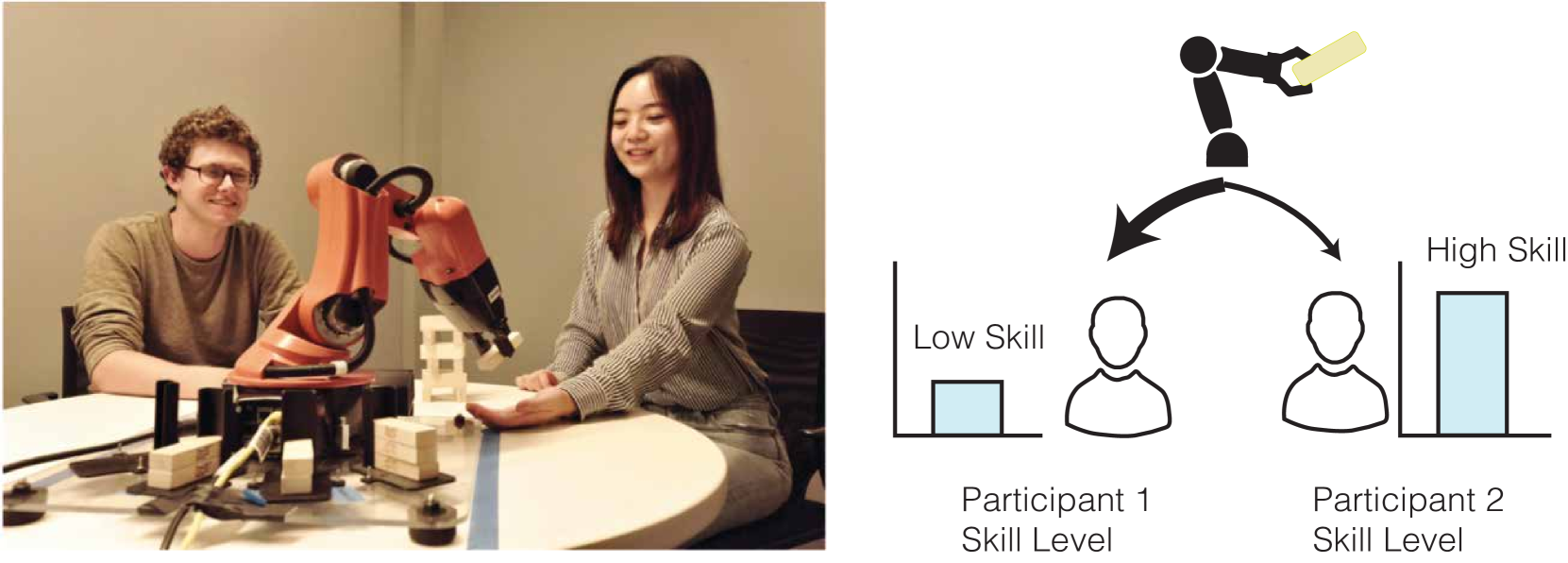
The foundation of successful human collaboration is deeply rooted in the principles of fairness. As robots are increasingly prevalent in various parts of society where they are working alongside groups and teams of humans, their ability to understand and act according to principles of fairness becomes crucial for their effective integration. This is especially critical when robots are part of multi-human teams, where they must make continuous decisions regarding the allocation of resources. These resources can be material, such as tools, or communicative, such as gaze direction, and must be distributed fairly among team members to ensure optimal team performance and healthy group dynamics. Therefore, our research focuses on understanding how robots can effectively participate within human groups by making fair decisions while contributing positively to group dynamics and outcomes. In this paper, I discuss advances toward ensuring that robots are capable of considering human notions of fairness in their decision-making.
Read more6/3/2024

0
Dynamic Fairness Perceptions in Human-Robot Interaction
Houston Claure, Kate Candon, Inyoung Shin, Marynel V'azquez
People deeply care about how fairly they are treated by robots. The established paradigm for probing fairness in Human-Robot Interaction (HRI) involves measuring the perception of the fairness of a robot at the conclusion of an interaction. However, such an approach is limited as interactions vary over time, potentially causing changes in fairness perceptions as well. To validate this idea, we conducted a 2x2 user study with a mixed design (N=40) where we investigated two factors: the timing of unfair robot actions (early or late in an interaction) and the beneficiary of those actions (either another robot or the participant). Our results show that fairness judgments are not static. They can shift based on the timing of unfair robot actions. Further, we explored using perceptions of three key factors (reduced welfare, conduct, and moral transgression) proposed by a Fairness Theory from Organizational Justice to predict momentary perceptions of fairness in our study. Interestingly, we found that the reduced welfare and moral transgression factors were better predictors than all factors together. Our findings reinforce the idea that unfair robot behavior can shape perceptions of group dynamics and trust towards a robot and pave the path to future research directions on moment-to-moment fairness perceptions
Read more9/14/2024

0
Rolling in the deep of cognitive and AI biases
Athena Vakali, Nicoleta Tantalaki
Nowadays, we delegate many of our decisions to Artificial Intelligence (AI) that acts either in solo or as a human companion in decisions made to support several sensitive domains, like healthcare, financial services and law enforcement. AI systems, even carefully designed to be fair, are heavily criticized for delivering misjudged and discriminated outcomes against individuals and groups. Numerous work on AI algorithmic fairness is devoted on Machine Learning pipelines which address biases and quantify fairness under a pure computational view. However, the continuous unfair and unjust AI outcomes, indicate that there is urgent need to understand AI as a sociotechnical system, inseparable from the conditions in which it is designed, developed and deployed. Although, the synergy of humans and machines seems imperative to make AI work, the significant impact of human and societal factors on AI bias is currently overlooked. We address this critical issue by following a radical new methodology under which human cognitive biases become core entities in our AI fairness overview. Inspired by the cognitive science definition and taxonomy of human heuristics, we identify how harmful human actions influence the overall AI lifecycle, and reveal human to AI biases hidden pathways. We introduce a new mapping, which justifies the human heuristics to AI biases reflections and we detect relevant fairness intensities and inter-dependencies. We envision that this approach will contribute in revisiting AI fairness under deeper human-centric case studies, revealing hidden biases cause and effects.
Read more8/1/2024
0
Relevance-driven Decision Making for Safer and More Efficient Human Robot Collaboration
Xiaotong Zhang, Dingcheng Huang, Kamal Youcef-Toumi
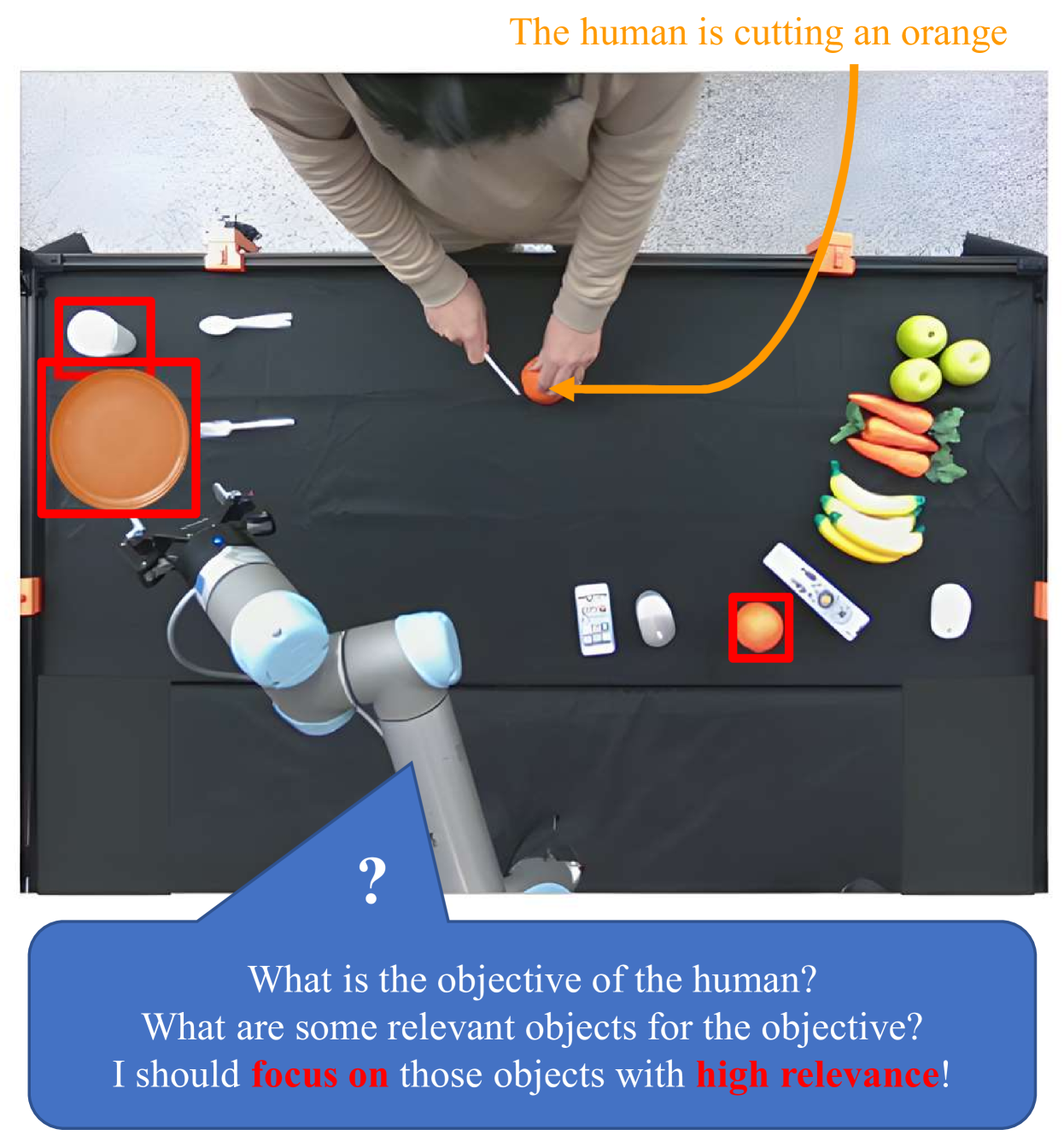
Human intelligence possesses the ability to effectively focus on important environmental components, which enhances perception, learning, reasoning, and decision-making. Inspired by this cognitive mechanism, we introduced a novel concept termed relevance for Human-Robot Collaboration (HRC). Relevance is defined as the importance of the objects based on the applicability and pertinence of the objects for the human objective or other factors. In this paper, we further developed a novel two-loop framework integrating real-time and asynchronous processing to quantify relevance and apply relevance for safer and more efficient HRC. The asynchronous loop leverages the world knowledge from an LLM and quantifies relevance, and the real-time loop executes scene understanding, human intent prediction, and decision-making based on relevance. In decision making, we proposed and developed a human robot task allocation method based on relevance and a novel motion generation and collision avoidance methodology considering the prediction of human trajectory. Simulations and experiments show that our methodology for relevance quantification can accurately and robustly predict the human objective and relevance, with an average accuracy of up to 0.90 for objective prediction and up to 0.96 for relevance prediction. Moreover, our motion generation methodology reduces collision cases by 63.76% and collision frames by 44.74% when compared with a state-of-the-art (SOTA) collision avoidance method. Our framework and methodologies, with relevance, guide the robot on how to best assist humans and generate safer and more efficient actions for HRC.
Read more9/24/2024