DynamicRouteGPT: A Real-Time Multi-Vehicle Dynamic Navigation Framework Based on Large Language Models

0

Sign in to get full access
Overview
- A real-time multi-vehicle dynamic navigation framework called DynamicRouteGPT that uses large language models
- Enables efficient route planning and navigation for multiple vehicles in dynamic environments
- Leverages the powerful capabilities of large language models to handle complex transportation scenarios
Plain English Explanation
The paper presents DynamicRouteGPT, a real-time multi-vehicle dynamic navigation framework that uses large language models. This system is designed to help efficiently plan and navigate routes for multiple vehicles in constantly changing environments.
Large language models are powerful AI systems that can understand and generate human-like text. The researchers realized that these models could be very useful for tackling complex transportation challenges, such as responding to sudden changes in traffic or road conditions. By incorporating a large language model into their navigation system, DynamicRouteGPT can make more informed and adaptive decisions to get vehicles to their destinations quickly and safely.
The key idea is to leverage the language model's ability to comprehend and reason about transportation-related information, like maps, traffic patterns, and vehicle capabilities. This allows the system to dynamically plan the best routes for multiple vehicles, taking into account the constantly evolving situation on the roads. The language model can also communicate with the vehicles, providing real-time guidance and adjusting plans as needed.
Overall, DynamicRouteGPT represents an innovative approach to multi-vehicle navigation that harnesses the power of large language models to make transportation more efficient and responsive to changing conditions.
Technical Explanation
The DynamicRouteGPT framework consists of several key components:
-
Large Language Model: At the core of the system is a large pre-trained language model, which serves as the brain for processing and reasoning about transportation-related information.
-
Multi-Vehicle Route Planning: The language model is used to dynamically plan the optimal routes for multiple vehicles, taking into account factors like traffic, road conditions, and vehicle capabilities.
-
Real-Time Coordination: The system continuously monitors the situation and coordinates the vehicles, adjusting routes and providing guidance as needed to ensure efficient and safe navigation.
-
Vehicle-Language Model Interface: The framework includes mechanisms for the language model to communicate with the vehicles, sending updates and receiving feedback to adapt the navigation strategy.
The researchers evaluated DynamicRouteGPT in a variety of simulated scenarios, demonstrating its ability to outperform traditional navigation approaches in terms of travel time, energy efficiency, and overall coordination of multiple vehicles. The language model's comprehensive understanding of the transportation domain and its capacity for real-time reasoning were crucial to the system's effectiveness.
Critical Analysis
The paper presents a compelling approach to multi-vehicle navigation, but there are a few areas that could benefit from further exploration:
-
Scalability: The researchers tested DynamicRouteGPT with a limited number of vehicles. It would be important to understand how the system scales as the number of vehicles increases, particularly in terms of computational requirements and decision-making complexity.
-
Real-world Deployment: The evaluation was conducted in simulated environments, and it would be valuable to assess the performance of DynamicRouteGPT in real-world transportation networks, which may introduce additional challenges and constraints.
-
Safety and Reliability: While the paper mentions the system's ability to maintain safe navigation, further analysis of the safety mechanisms and their robustness would be beneficial, especially in the context of unexpected events or system failures.
-
Ethical Considerations: As with any transportation system that involves automated decision-making, there may be ethical implications, such as the prioritization of certain vehicles or passengers, that should be carefully examined.
Overall, the DynamicRouteGPT framework represents a promising step forward in the field of multi-vehicle navigation, leveraging the power of large language models to address the challenges of dynamic transportation environments. Further research and real-world testing will be crucial to refine and validate the approach.
Conclusion
The DynamicRouteGPT framework demonstrates how large language models can be effectively applied to the domain of multi-vehicle navigation, enabling real-time, adaptive route planning and coordination. By harnessing the language model's comprehensive understanding of transportation-related information, the system can make more informed decisions and respond to changing conditions, leading to improved travel times, energy efficiency, and overall transportation network performance.
As the world becomes increasingly interconnected and reliant on efficient transportation systems, DynamicRouteGPT represents a significant step forward in the development of intelligent and adaptive navigation solutions. The integration of large language models into transportation frameworks could pave the way for more dynamic, responsive, and user-centric mobility services, ultimately contributing to a more sustainable and accessible transportation future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
DynamicRouteGPT: A Real-Time Multi-Vehicle Dynamic Navigation Framework Based on Large Language Models
Ziai Zhou, Bin Zhou, Hao Liu
Real-time dynamic path planning in complex traffic environments presents challenges, such as varying traffic volumes and signal wait times. Traditional static routing algorithms like Dijkstra and A* compute shortest paths but often fail under dynamic conditions. Recent Reinforcement Learning (RL) approaches offer improvements but tend to focus on local optima, risking dead-ends or boundary issues. This paper proposes a novel approach based on causal inference for real-time dynamic path planning, balancing global and local optimality. We first use the static Dijkstra algorithm to compute a globally optimal baseline path. A distributed control strategy then guides vehicles along this path. At intersections, DynamicRouteGPT performs real-time decision-making for local path selection, considering real-time traffic, driving preferences, and unexpected events. DynamicRouteGPT integrates Markov chains, Bayesian inference, and large-scale pretrained language models like Llama3 8B to provide an efficient path planning solution. It dynamically adjusts to traffic scenarios and driver preferences and requires no pre-training, offering broad applicability across road networks. A key innovation is the construction of causal graphs for counterfactual reasoning, optimizing path decisions. Experimental results show that our method achieves state-of-the-art performance in real-time dynamic path planning for multiple vehicles while providing explainable path selections, offering a novel and efficient solution for complex traffic environments.
Read more8/27/2024
0
Personalized and Context-aware Route Planning for Edge-assisted Vehicles
Dinesh Cyril Selvaraj, Falko Dressler, Carla Fabiana Chiasserini
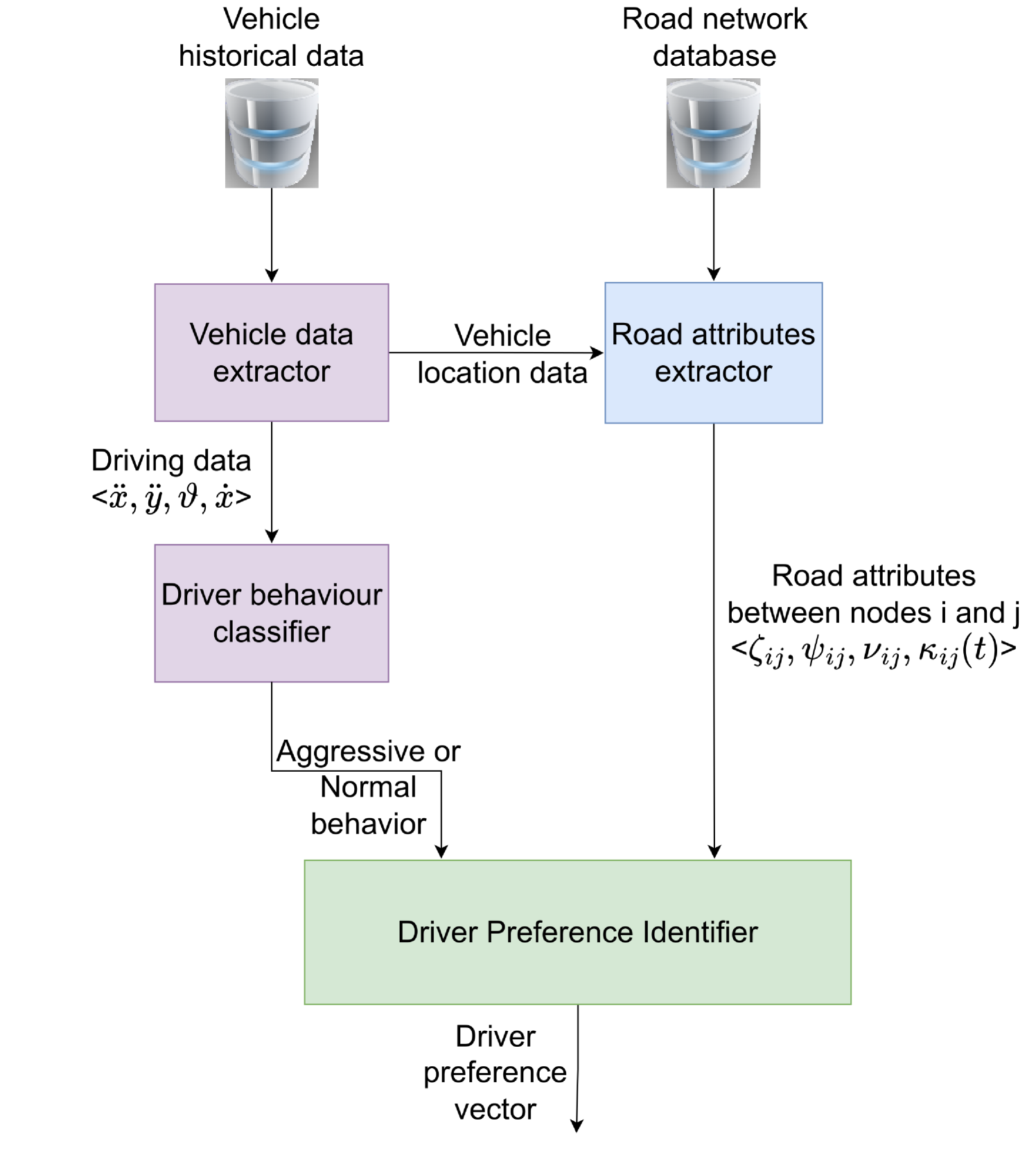
Conventional route planning services typically offer the same routes to all drivers, focusing primarily on a few standardized factors such as travel distance or time, overlooking individual driver preferences. With the inception of autonomous vehicles expected in the coming years, where vehicles will rely on routes decided by such planners, there arises a need to incorporate the specific preferences of each driver, ensuring personalized navigation experiences. In this work, we propose a novel approach based on graph neural networks (GNNs) and deep reinforcement learning (DRL), aimed at customizing routes to suit individual preferences. By analyzing the historical trajectories of individual drivers, we classify their driving behavior and associate it with relevant road attributes as indicators of driver preferences. The GNN is capable of representing the road network as graph-structured data effectively, while DRL is capable of making decisions utilizing reward mechanisms to optimize route selection with factors such as travel costs, congestion level, and driver satisfaction. We evaluate our proposed GNN-based DRL framework using a real-world road network and demonstrate its ability to accommodate driver preferences, offering a range of route options tailored to individual drivers. The results indicate that our framework can select routes that accommodate driver's preferences with up to a 17% improvement compared to a generic route planner, and reduce the travel time by 33% (afternoon) and 46% (evening) relatively to the shortest distance-based approach.
Read more7/26/2024

0
Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
Read more6/6/2024
🚀
0
Traffic Performance GPT (TP-GPT): Real-Time Data Informed Intelligent ChatBot for Transportation Surveillance and Management
Bingzhang Wang (Joey), Zhiyu (Joey), Cai, Muhammad Monjurul Karim, Chenxi Liu, Yinhai Wang
The digitization of traffic sensing infrastructure has significantly accumulated an extensive traffic data warehouse, which presents unprecedented challenges for transportation analytics. The complexities associated with querying large-scale multi-table databases require specialized programming expertise and labor-intensive development. Additionally, traditional analysis methods have focused mainly on numerical data, often neglecting the semantic aspects that could enhance interpretability and understanding. Furthermore, real-time traffic data access is typically limited due to privacy concerns. To bridge this gap, the integration of Large Language Models (LLMs) into the domain of traffic management presents a transformative approach to addressing the complexities and challenges inherent in modern transportation systems. This paper proposes an intelligent online chatbot, TP-GPT, for efficient customized transportation surveillance and management empowered by a large real-time traffic database. The innovative framework leverages contextual and generative intelligence of language models to generate accurate SQL queries and natural language interpretations by employing transportation-specialized prompts, Chain-of-Thought prompting, few-shot learning, multi-agent collaboration strategy, and chat memory. Experimental study demonstrates that our approach outperforms state-of-the-art baselines such as GPT-4 and PaLM 2 on a challenging traffic-analysis benchmark TransQuery. TP-GPT would aid researchers and practitioners in real-time transportation surveillance and management in a privacy-preserving, equitable, and customizable manner.
Read more5/7/2024