Personalized and Context-aware Route Planning for Edge-assisted Vehicles

0
Sign in to get full access
Overview
- This paper presents a personalized and context-aware route planning system for edge-assisted vehicles.
- The system leverages edge computing resources to provide real-time route optimization tailored to individual driver preferences and contextual factors.
- Key innovations include a novel multi-objective optimization algorithm and a dynamic edge resource allocation mechanism.
Plain English Explanation
The paper describes a new way to plan driving routes that is customized for each individual driver and takes into account the current situation on the roads. This is made possible by using computers at the edge of the network (i.e., closer to the vehicle) to quickly analyze data and provide the optimal route.
The system considers a driver's personal preferences, such as their desired balance between travel time, fuel efficiency, and scenic routes. It also adapts the route plan based on real-time information about traffic conditions, weather, construction, and other contextual factors. By using edge computing resources, the system can respond rapidly to changing circumstances and provide a personalized, up-to-date route recommendation.
The key innovations in this work are:
- A novel optimization algorithm that can balance multiple objectives (e.g., time, fuel, scenery) when planning the route.
- A dynamic mechanism to allocate computing resources at the network edge to efficiently handle the route planning for many vehicles simultaneously.
This approach aims to make driving more convenient, efficient, and enjoyable for individual users, while also potentially reducing overall traffic congestion and environmental impact.
Technical Explanation
The paper presents a personalized and context-aware route planning system for edge-assisted vehicles. The system leverages edge computing resources to provide real-time route optimization that is tailored to individual driver preferences and the current traffic/environmental conditions.
The proposed architecture consists of on-board vehicle sensors, a mobile app for user input, and edge computing nodes that perform the route planning. The authors develop a multi-objective optimization algorithm to balance factors like travel time, fuel efficiency, and route aesthetics based on driver profiles. They also introduce a dynamic edge resource allocation mechanism to efficiently handle route planning requests from multiple vehicles.
The experimental evaluation demonstrates that the system can provide personalized routes that outperform traditional routing in terms of travel time, fuel consumption, and user satisfaction. The authors also discuss limitations of the current work and opportunities for future research.
Critical Analysis
The paper presents a well-designed and promising approach to personalized and context-aware route planning for edge-assisted vehicles. The use of edge computing resources to enable real-time optimization is a key strength, as it allows the system to rapidly adapt to changing conditions.
The multi-objective optimization algorithm is a novel contribution, as it allows the system to balance various driver preferences beyond just travel time. The dynamic edge resource allocation mechanism is also an important innovation to ensure the system can scale to handle many vehicles simultaneously.
However, the paper does not deeply explore potential limitations or edge cases. For example, the authors mention that the current system assumes a single route is provided, but in practice, users may want alternative route options to choose from. Additionally, the system's reliance on edge computing infrastructure could be a potential bottleneck if the infrastructure is insufficient or unreliable in certain areas.
Further research could also investigate how the system might handle unexpected events (e.g., accidents, road closures) and ensure the route planning remains responsive and reliable in those scenarios. Integrating the system with traffic management authorities or other data sources could also enhance its real-world effectiveness.
Conclusion
This paper presents a novel personalized and context-aware route planning system for edge-assisted vehicles. By leveraging edge computing resources, the system can provide real-time route optimization that adapts to individual driver preferences and changing environmental conditions.
The key innovations include a multi-objective optimization algorithm and a dynamic edge resource allocation mechanism. Experimental results demonstrate the system's ability to improve travel time, fuel efficiency, and user satisfaction compared to traditional routing approaches.
While the paper identifies some limitations, the overall approach represents an important step forward in making driving more convenient, efficient, and enjoyable for individual users, while also potentially contributing to broader societal benefits like reduced traffic congestion and environmental impact.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Personalized and Context-aware Route Planning for Edge-assisted Vehicles
Dinesh Cyril Selvaraj, Falko Dressler, Carla Fabiana Chiasserini
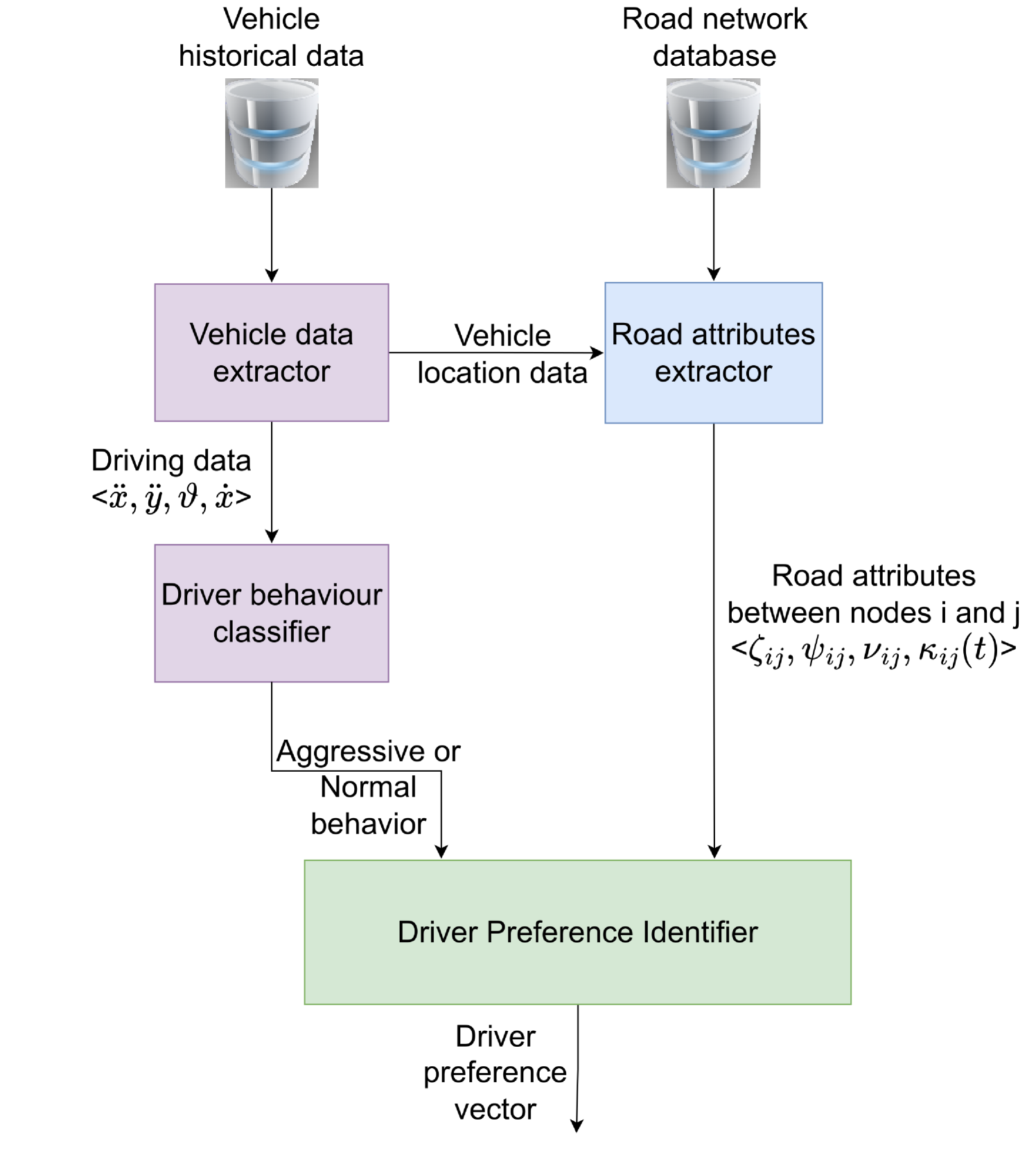
Conventional route planning services typically offer the same routes to all drivers, focusing primarily on a few standardized factors such as travel distance or time, overlooking individual driver preferences. With the inception of autonomous vehicles expected in the coming years, where vehicles will rely on routes decided by such planners, there arises a need to incorporate the specific preferences of each driver, ensuring personalized navigation experiences. In this work, we propose a novel approach based on graph neural networks (GNNs) and deep reinforcement learning (DRL), aimed at customizing routes to suit individual preferences. By analyzing the historical trajectories of individual drivers, we classify their driving behavior and associate it with relevant road attributes as indicators of driver preferences. The GNN is capable of representing the road network as graph-structured data effectively, while DRL is capable of making decisions utilizing reward mechanisms to optimize route selection with factors such as travel costs, congestion level, and driver satisfaction. We evaluate our proposed GNN-based DRL framework using a real-world road network and demonstrate its ability to accommodate driver preferences, offering a range of route options tailored to individual drivers. The results indicate that our framework can select routes that accommodate driver's preferences with up to a 17% improvement compared to a generic route planner, and reduce the travel time by 33% (afternoon) and 46% (evening) relatively to the shortest distance-based approach.
Read more7/26/2024
🧠
0
New!Neural Networks for Vehicle Routing Problem
L'aszl'o Kov'acs, Ali Jlidi
The Vehicle Routing Problem is about optimizing the routes of vehicles to meet the needs of customers at specific locations. The route graph consists of depots on several levels and customer positions. Several optimization methods have been developed over the years, most of which are based on some type of classic heuristic: genetic algorithm, simulated annealing, tabu search, ant colony optimization, firefly algorithm. Recent developments in machine learning provide a new toolset, the rich family of neural networks, for tackling complex problems. The main area of application of neural networks is the area of classification and regression. Route optimization can be viewed as a new challenge for neural networks. The article first presents an analysis of the applicability of neural network tools, then a novel graphical neural network model is presented in detail. The efficiency analysis based on test experiments shows the applicability of the proposed NN architecture.
Read more9/18/2024
0
Trajectory Planning for Autonomous Driving in Unstructured Scenarios Based on Graph Neural Network and Numerical Optimization
Sumin Zhang, Kuo Li, Rui He, Zhiwei Meng, Yupeng Chang, Xiaosong Jin, Ri Bai
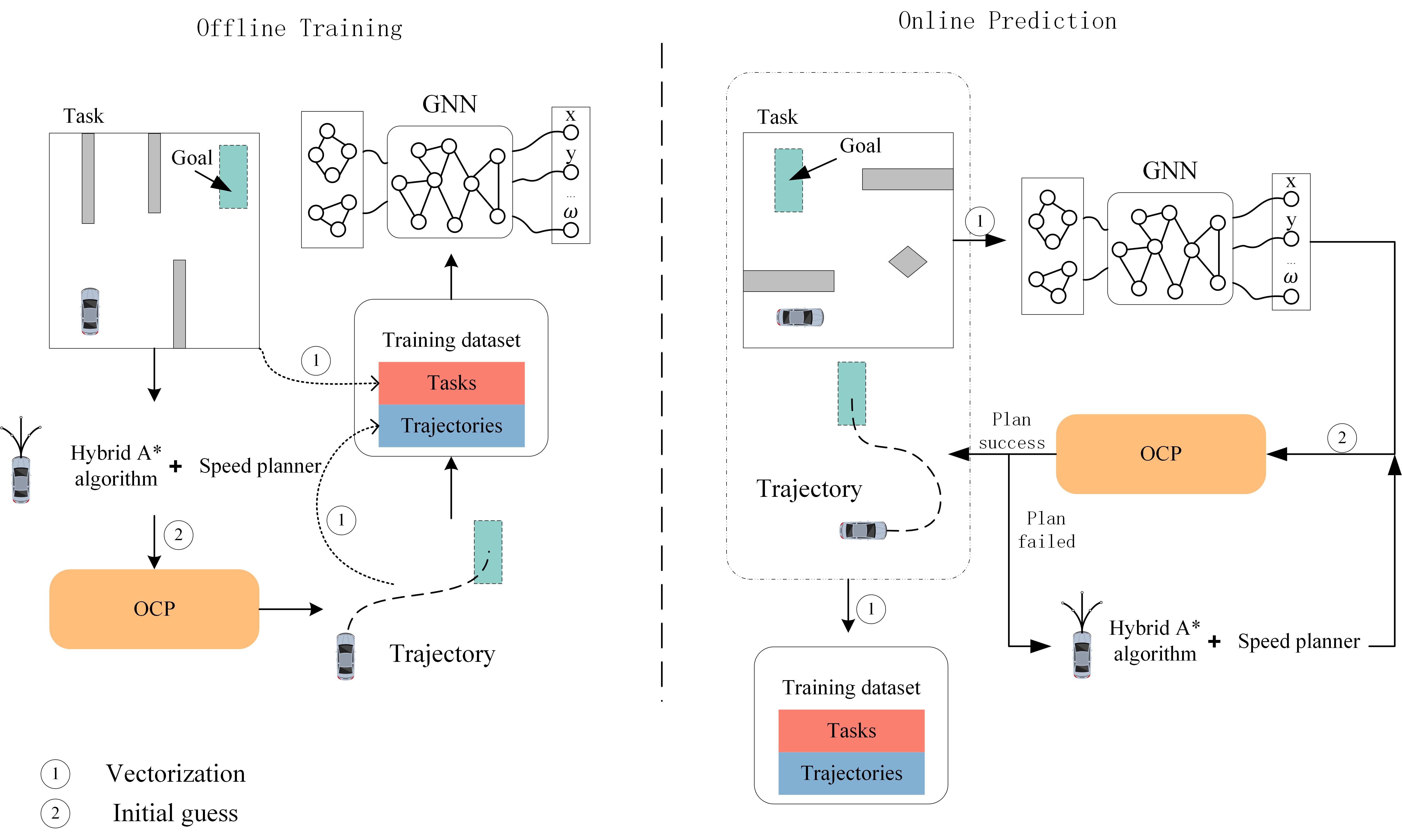
In unstructured environments, obstacles are diverse and lack lane markings, making trajectory planning for intelligent vehicles a challenging task. Traditional trajectory planning methods typically involve multiple stages, including path planning, speed planning, and trajectory optimization. These methods require the manual design of numerous parameters for each stage, resulting in significant workload and computational burden. While end-to-end trajectory planning methods are simple and efficient, they often fail to ensure that the trajectory meets vehicle dynamics and obstacle avoidance constraints in unstructured scenarios. Therefore, this paper proposes a novel trajectory planning method based on Graph Neural Networks (GNN) and numerical optimization. The proposed method consists of two stages: (1) initial trajectory prediction using the GNN, (2) trajectory optimization using numerical optimization. First, the graph neural network processes the environment information and predicts a rough trajectory, replacing traditional path and speed planning. This predicted trajectory serves as the initial solution for the numerical optimization stage, which optimizes the trajectory to ensure compliance with vehicle dynamics and obstacle avoidance constraints. We conducted simulation experiments to validate the feasibility of the proposed algorithm and compared it with other mainstream planning algorithms. The results demonstrate that the proposed method simplifies the trajectory planning process and significantly improves planning efficiency.
Read more6/14/2024

0
DynamicRouteGPT: A Real-Time Multi-Vehicle Dynamic Navigation Framework Based on Large Language Models
Ziai Zhou, Bin Zhou, Hao Liu
Real-time dynamic path planning in complex traffic environments presents challenges, such as varying traffic volumes and signal wait times. Traditional static routing algorithms like Dijkstra and A* compute shortest paths but often fail under dynamic conditions. Recent Reinforcement Learning (RL) approaches offer improvements but tend to focus on local optima, risking dead-ends or boundary issues. This paper proposes a novel approach based on causal inference for real-time dynamic path planning, balancing global and local optimality. We first use the static Dijkstra algorithm to compute a globally optimal baseline path. A distributed control strategy then guides vehicles along this path. At intersections, DynamicRouteGPT performs real-time decision-making for local path selection, considering real-time traffic, driving preferences, and unexpected events. DynamicRouteGPT integrates Markov chains, Bayesian inference, and large-scale pretrained language models like Llama3 8B to provide an efficient path planning solution. It dynamically adjusts to traffic scenarios and driver preferences and requires no pre-training, offering broad applicability across road networks. A key innovation is the construction of causal graphs for counterfactual reasoning, optimizing path decisions. Experimental results show that our method achieves state-of-the-art performance in real-time dynamic path planning for multiple vehicles while providing explainable path selections, offering a novel and efficient solution for complex traffic environments.
Read more8/27/2024