Easy real-time collision detection

0

Sign in to get full access
Overview
- This paper presents a novel approach for real-time collision detection that is easy to implement and computationally efficient.
- The proposed method relies on a simple geometric principle and can be applied to a wide range of objects, including complex shapes.
- The authors demonstrate the effectiveness of their approach through extensive evaluations and comparisons to existing techniques.
Plain English Explanation
The paper describes a new way to detect collisions between objects in real-time, which is important for applications like video games, robotics, and virtual reality. The key idea is to use a simple geometric rule to quickly check if two objects are going to collide, without needing to do complex calculations.
The method works by representing each object as a set of bounding boxes - essentially, rectangular shapes that tightly fit around the object. When two objects move, the system checks if any of their bounding boxes overlap. If they do, then the objects must be colliding. This is much faster than trying to model the exact shape of each object and checking for intersections.
The authors show that their approach is effective across a wide range of object shapes and movement patterns. It can handle things like Point Cloud Obstacle Detection via Map Filtration, Implicit Swept Volume SDFs for Enabling Continuous Collision Detection, and Volumetric Primitives for Modeling, Rendering, and Scattering in Emissive Media. This makes it a versatile tool that can be used in many different applications.
Overall, the key advantage of this approach is that it is simple to implement and very computationally efficient, yet still accurate enough for real-world use cases. This could help enable more realistic and responsive simulations and interactions in a variety of domains.
Technical Explanation
The core of the proposed collision detection method is based on the observation that if the bounding boxes of two objects do not overlap, then the objects cannot be colliding. The authors leverage this simple geometric principle to develop an efficient algorithm for real-time collision detection.
Specifically, the method represents each object as a set of axis-aligned bounding boxes. As the objects move, the system checks for overlaps between the bounding boxes of different objects. If any bounding boxes overlap, then a collision has been detected. This approach is much faster than trying to model the exact shape of each object and perform more complex intersection tests.
The authors evaluate their method on a variety of test cases, including Label-Efficient 3D Object Detection on Road-Side Scenes and RADE-GS: Rasterizing Depth with Gaussian Splatting. They show that their approach is significantly faster than traditional collision detection techniques, while maintaining comparable accuracy. The simplicity of the bounding box approach also makes it easy to implement and integrate into existing systems.
One key advantage of this method is its generality - it can be applied to a wide range of object shapes and movement patterns, without requiring specialized tuning or configuration. This makes it a versatile tool that can be used in many different application domains.
Critical Analysis
The paper presents a compelling and practical solution for real-time collision detection. The authors' key insight - leveraging axis-aligned bounding boxes to efficiently check for overlaps - is simple yet effective. The extensive evaluation results demonstrate the method's strong performance across a variety of test cases.
That said, the paper does not address some potential limitations or areas for further research. For example, the bounding box approach may struggle with highly deformable or articulated objects, where the bounding boxes could become quite large and lead to false positives. Additionally, the paper does not explore how the method might scale to extremely large or complex scenes with thousands of moving objects.
It would also be interesting to see how this approach compares to more advanced collision detection techniques, such as those based on spatial data structures or implicit representations. While the simplicity of the bounding box method is a strength, there may be scenarios where more sophisticated approaches are necessary to maintain accuracy and performance.
Overall, the paper presents a compelling and practical solution for real-time collision detection. The authors' emphasis on ease of implementation and computational efficiency makes the method an attractive option for many applications. Further research exploring the method's limitations and potential extensions could help strengthen its position as a go-to collision detection technique.
Conclusion
This paper introduces a novel approach for real-time collision detection that is simple, efficient, and widely applicable. By representing objects as a set of bounding boxes and checking for overlaps, the method can quickly identify collisions without requiring complex geometric calculations.
The authors demonstrate the effectiveness of their approach through extensive evaluations, showing that it outperforms traditional collision detection techniques in terms of speed while maintaining comparable accuracy. The generality of the bounding box method also makes it a versatile tool that can be integrated into a variety of applications, from video games and robotics to 3D object detection in road-side scenes and rendering of emissive media.
Overall, this work presents an important contribution to the field of real-time collision detection, offering a practical and effective solution that could help enable more responsive and realistic simulations and interactions across numerous domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Easy real-time collision detection
Jonathan Fabrizio
This article presents an easy distance field-based collision detection scheme to detect collisions of an object with its environment. Through the clever use of back-face culling and z-buffering, the solution is precise and very easy to implement. Since the complete scheme relies on the graphics pipeline, the collision detection is performed by the GPU. It is easy to use and only requires the meshes of the object and the scene; it does not rely on special representations. It can natively handle collision with primitives emitted directly on the pipeline. Our scheme is efficient and we expose many possible variants (especially an adaptation to certain particle systems). The main limitation of our scheme is that it imposes some restrictions on the shape of the considered objects - but not on their environment. We evaluate our scheme by first, comparing with the FCL, second, testing a more complete scene (involving geometry shader, tessellation and compute shader) and last, illustrating with a particle system.
Read more6/4/2024
0
New!Hardware-Accelerated Ray Tracing for Discrete and Continuous Collision Detection on GPUs
Sizhe Sui, Luis Sentis, Andrew Bylard
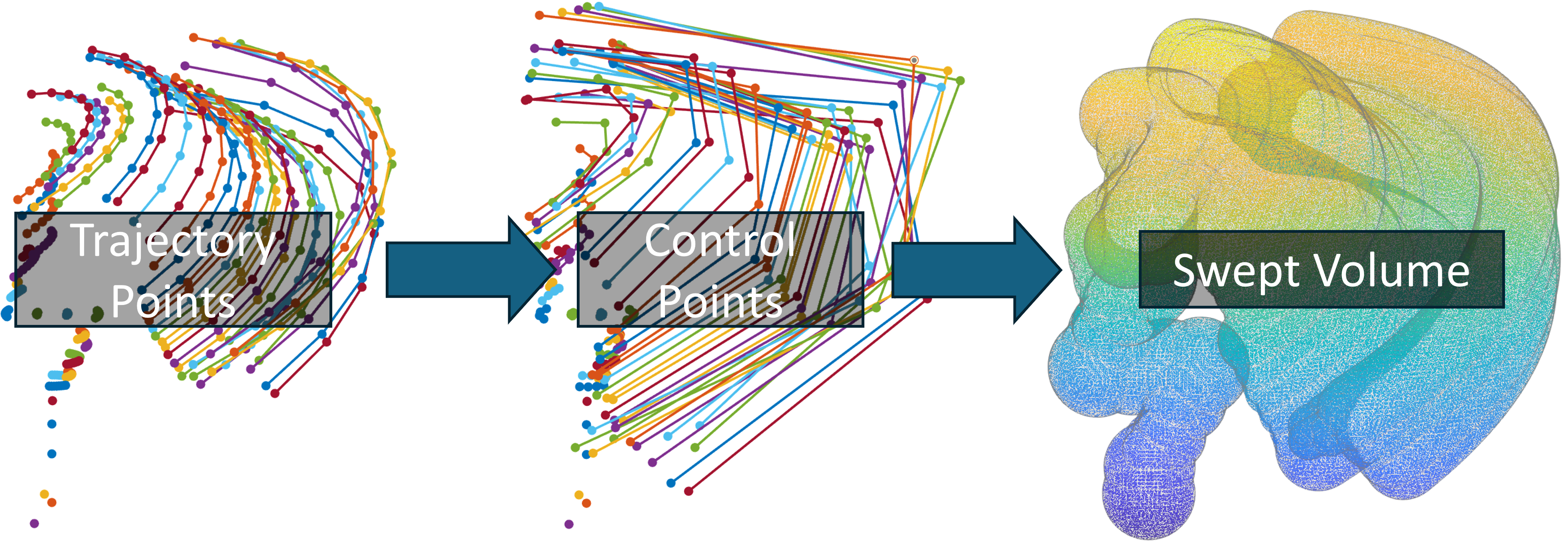
This paper presents a set of simple and intuitive robot collision detection algorithms that show substantial scaling improvements for high geometric complexity and large numbers of collision queries by leveraging hardware-accelerated ray tracing on GPUs. It is the first leveraging hardware-accelerated ray-tracing for direct volume mesh-to-mesh discrete collision detection and applying it to continuous collision detection. We introduce two methods: Ray-Traced Discrete-Pose Collision Detection for exact robot mesh to obstacle mesh collision detection, and Ray-Traced Continuous Collision Detection for robot sphere representation to obstacle mesh swept collision detection, using piecewise-linear or quadratic B-splines. For robot link meshes totaling 24k triangles and obstacle meshes of over 190k triangles, our methods were up to 3 times faster in batched discrete-pose queries than a state-of-the-art GPU-based method using a sphere robot representation. For the same obstacle mesh scene, our sphere-robot continuous collision detection was up to 9 times faster depending on trajectory batch size. We also performed a detailed measurement of the volume coverage accuracy of various sphere/mesh pose/path representations to provide insight into the tradeoffs between speed and accuracy of different robot collision detection methods.
Read more9/17/2024
0
GPU-Accelerated Optimization-Based Collision Avoidance
Zeming Wu, Zhuping Wang, Hao Zhang
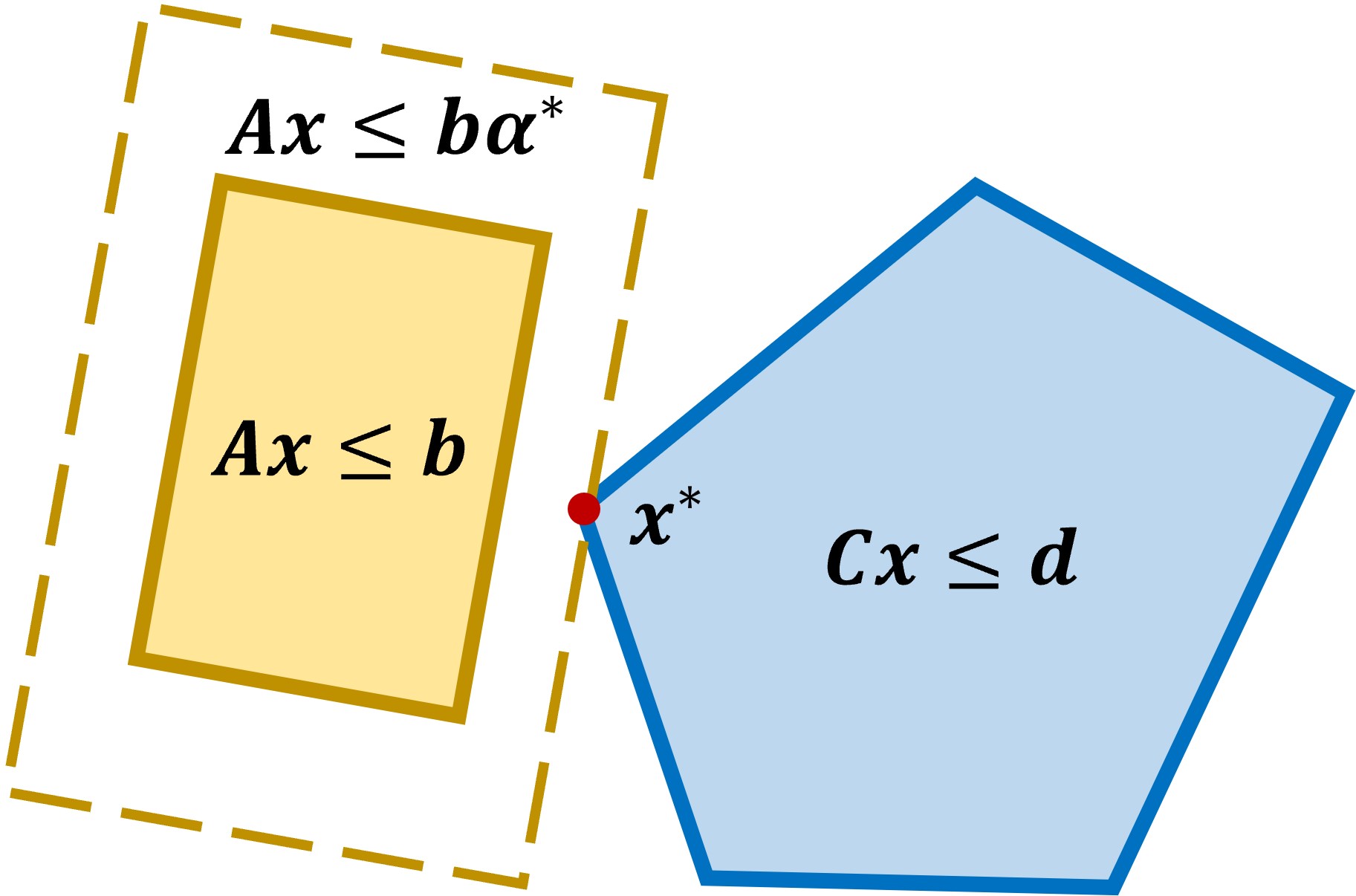
This paper proposes a GPU-accelerated optimization framework for collision avoidance problems where the controlled objects and the obstacles can be modeled as the finite union of convex polyhedra. A novel collision avoidance constraint is proposed based on scale-based collision detection and the strong duality of convex optimization. Under this constraint, the high-dimensional non-convex optimization problems of collision avoidance can be decomposed into several low-dimensional quadratic programmings (QPs) following the paradigm of alternating direction method of multipliers (ADMM). Furthermore, these low-dimensional QPs can be solved parallel with GPUs, significantly reducing computational time. High-fidelity simulations are conducted to validate the proposed method's effectiveness and practicality.
Read more6/12/2024

0
3D Gaussian Ray Tracing: Fast Tracing of Particle Scenes
Nicolas Moenne-Loccoz, Ashkan Mirzaei, Or Perel, Riccardo de Lutio, Janick Martinez Esturo, Gavriel State, Sanja Fidler, Nicholas Sharp, Zan Gojcic
Particle-based representations of radiance fields such as 3D Gaussian Splatting have found great success for reconstructing and re-rendering of complex scenes. Most existing methods render particles via rasterization, projecting them to screen space tiles for processing in a sorted order. This work instead considers ray tracing the particles, building a bounding volume hierarchy and casting a ray for each pixel using high-performance GPU ray tracing hardware. To efficiently handle large numbers of semi-transparent particles, we describe a specialized rendering algorithm which encapsulates particles with bounding meshes to leverage fast ray-triangle intersections, and shades batches of intersections in depth-order. The benefits of ray tracing are well-known in computer graphics: processing incoherent rays for secondary lighting effects such as shadows and reflections, rendering from highly-distorted cameras common in robotics, stochastically sampling rays, and more. With our renderer, this flexibility comes at little cost compared to rasterization. Experiments demonstrate the speed and accuracy of our approach, as well as several applications in computer graphics and vision. We further propose related improvements to the basic Gaussian representation, including a simple use of generalized kernel functions which significantly reduces particle hit counts.
Read more7/11/2024