Efficient and Consistent Bundle Adjustment on Lidar Point Clouds

0
🤖
Sign in to get full access
Overview
- This paper presents an efficient and consistent bundle adjustment method for lidar sensors.
- The method uses edge and plane features to represent the scene geometry and directly minimizes the Euclidean distance from each raw point to the respective geometry feature.
- The paper introduces a novel concept called point clusters to represent and solve the optimization problem more efficiently.
Plain English Explanation
The paper addresses the problem of bundle adjustment, which is a fundamental challenge in robot vision. Bundle adjustment refers to the simultaneous determination of sensor poses and scene geometry, which is crucial for tasks like visual SLAM.
The authors propose a new method that uses edge and plane features to represent the 3D scene, rather than individual points. This allows them to directly minimize the distance from each raw sensor data point to the relevant geometric feature, which is more efficient than traditional approaches. To further improve efficiency, the paper introduces the concept of "point clusters," which encode all the raw points associated with a single feature using a compact set of parameters. This avoids the need to individually consider each raw point during the optimization process.
The authors also derive closed-form derivatives of the optimization problem up to the second order, which allows them to develop a fast and accurate solver. This solver not only estimates the sensor poses but also provides a measure of the uncertainty in those poses, leading to more consistent results.
Technical Explanation
The paper presents an efficient and consistent bundle adjustment method for lidar sensors. The key innovations are:
-
Feature Representation: The method uses edge and plane features to represent the scene geometry, rather than individual points. This allows the algorithm to directly minimize the Euclidean distance from each raw point to the respective geometry feature.
-
Point Clusters: To represent and solve the optimization problem more efficiently, the paper introduces a novel concept called "point clusters." These encode all the raw points associated with a single feature using a compact set of parameters, the "point cluster coordinates." This avoids the need to enumerate each raw point during the optimization.
-
Efficient Optimization: The authors derive closed-form derivatives, up to the second order, of the bundle adjustment optimization based on the point cluster coordinates. They show these derivatives have desirable theoretical properties, such as sparsity and null spaces. Building on these insights, the paper develops an efficient second-order bundle adjustment solver.
-
Pose Uncertainty Estimation: The solver not only estimates the lidar poses but also exploits the second-order information to provide a measure of the pose uncertainty caused by measurement noise. This leads to more consistent estimates of the lidar poses.
The implementation of this method is open-sourced to benefit the robotics community and beyond.
Critical Analysis
The paper presents a compelling approach to the bundle adjustment problem for lidar sensors. The use of edge and plane features, along with the point cluster representation, appears to be an effective way to improve the efficiency and accuracy of the optimization process. The theoretical analysis of the derivatives and their properties is also a valuable contribution.
One potential limitation is the reliance on edge and plane features, which may not be present or easily extractable in all environments. It would be interesting to see how the method performs in more complex or unstructured scenes. Additionally, the paper does not provide a detailed comparison to other state-of-the-art bundle adjustment techniques, such as neural implicit approaches or deterministic search strategies, which could help contextualize the strengths and weaknesses of this approach.
Overall, this paper presents an innovative and potentially impactful contribution to the field of robot vision and SLAM. The authors' attention to both efficiency and consistency in the bundle adjustment process is commendable and deserves further exploration and validation.
Conclusion
This paper introduces an efficient and consistent bundle adjustment method for lidar sensors that leverages edge and plane features to represent the scene geometry. The key innovations include a novel point cluster representation and the derivation of closed-form derivatives for a fast and accurate optimization solver. The method not only estimates the lidar poses but also provides a measure of the uncertainty in those poses, leading to more consistent results.
The open-sourcing of the implementation is a valuable contribution to the robotics community, as bundle adjustment is a fundamental problem in robot vision. While the paper presents a compelling approach, further research is needed to explore its performance in more complex environments and compare it to other state-of-the-art techniques. Overall, this work represents an important step forward in the ongoing effort to improve the efficiency and reliability of sensor-based 3D reconstruction and mapping.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤖
0
Efficient and Consistent Bundle Adjustment on Lidar Point Clouds
Zheng Liu, Xiyuan Liu, Fu Zhang
Bundle Adjustment (BA) refers to the problem of simultaneous determination of sensor poses and scene geometry, which is a fundamental problem in robot vision. This paper presents an efficient and consistent bundle adjustment method for lidar sensors. The method employs edge and plane features to represent the scene geometry, and directly minimizes the natural Euclidean distance from each raw point to the respective geometry feature. A nice property of this formulation is that the geometry features can be analytically solved, drastically reducing the dimension of the numerical optimization. To represent and solve the resultant optimization problem more efficiently, this paper then proposes a novel concept {it point clusters}, which encodes all raw points associated to the same feature by a compact set of parameters, the {it point cluster coordinates}. We derive the closed-form derivatives, up to the second order, of the BA optimization based on the point cluster coordinates and show their theoretical properties such as the null spaces and sparsity. Based on these theoretical results, this paper develops an efficient second-order BA solver. Besides estimating the lidar poses, the solver also exploits the second order information to estimate the pose uncertainty caused by measurement noises, leading to consistent estimates of lidar poses. Moreover, thanks to the use of point cluster, the developed solver fundamentally avoids the enumeration of each raw point (which is very time-consuming due to the large number) in all steps of the optimization: cost evaluation, derivatives evaluation and uncertainty evaluation. The implementation of our method is open sourced to benefit the robotics community and beyond.
Read more6/18/2024

0
Bundle Adjustment in the Eager Mode
Zitong Zhan, Huan Xu, Zihang Fang, Xinpeng Wei, Yaoyu Hu, Chen Wang
Bundle adjustment (BA) is a critical technique in various robotic applications, such as simultaneous localization and mapping (SLAM), augmented reality (AR), and photogrammetry. BA optimizes parameters such as camera poses and 3D landmarks to align them with observations. With the growing importance of deep learning in perception systems, there is an increasing need to integrate BA with deep learning frameworks for enhanced reliability and performance. However, widely-used C++-based BA frameworks, such as GTSAM, g$^2$o, and Ceres, lack native integration with modern deep learning libraries like PyTorch. This limitation affects their flexibility, adaptability, ease of debugging, and overall implementation efficiency. To address this gap, we introduce an eager-mode BA framework seamlessly integrated with PyPose, providing PyTorch-compatible interfaces with high efficiency. Our approach includes GPU-accelerated, differentiable, and sparse operations designed for 2nd-order optimization, Lie group and Lie algebra operations, and linear solvers. Our eager-mode BA on GPU demonstrates substantial runtime efficiency, achieving an average speedup of 18.5$times$, 22$times$, and 23$times$ compared to GTSAM, g$^2$o, and Ceres, respectively.
Read more9/19/2024
0
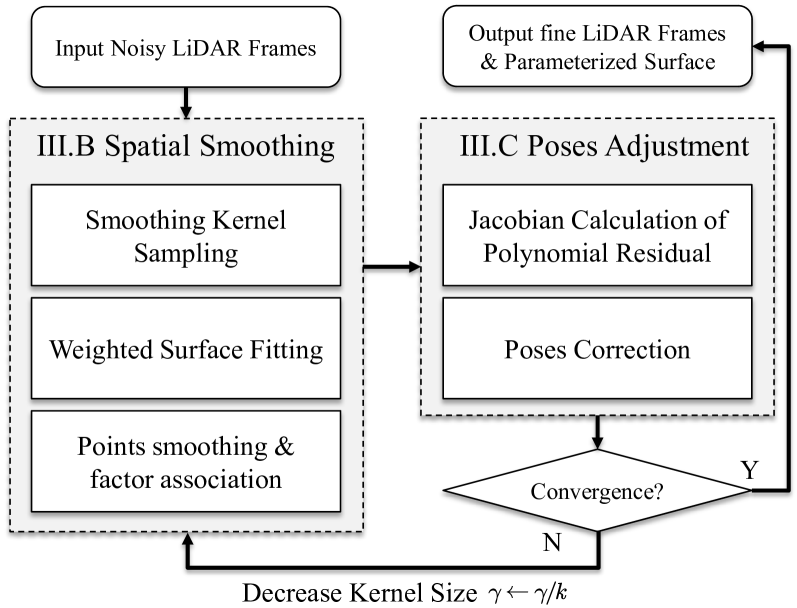
PSS-BA: LiDAR Bundle Adjustment with Progressive Spatial Smoothing
Jianping Li, Thien-Minh Nguyen, Shenghai Yuan, Lihua Xie
Accurate and consistent construction of point clouds from LiDAR scanning data is fundamental for 3D modeling applications. Current solutions, such as multiview point cloud registration and LiDAR bundle adjustment, predominantly depend on the local plane assumption, which may be inadequate in complex environments lacking of planar geometries or substantial initial pose errors. To mitigate this problem, this paper presents a LiDAR bundle adjustment with progressive spatial smoothing, which is suitable for complex environments and exhibits improved convergence capabilities. The proposed method consists of a spatial smoothing module and a pose adjustment module, which combines the benefits of local consistency and global accuracy. With the spatial smoothing module, we can obtain robust and rich surface constraints employing smoothing kernels across various scales. Then the pose adjustment module corrects all poses utilizing the novel surface constraints. Ultimately, the proposed method simultaneously achieves fine poses and parametric surfaces that can be directly employed for high-quality point cloud reconstruction. The effectiveness and robustness of our proposed approach have been validated on both simulation and real-world datasets. The experimental results demonstrate that the proposed method outperforms the existing methods and achieves better accuracy in complex environments with low planar structures.
Read more9/24/2024

0
Explicit Second-order LiDAR Bundle Adjustment Algorithm Using Mean Squared Group Metric
Tingchen Ma, Yongsheng Ou, Sheng Xu
The bundle adjustment (BA) algorithm is a widely used nonlinear optimization technique in the backend of Simultaneous Localization and Mapping (SLAM) systems. By leveraging the co-view relationships of landmarks from multiple perspectives, the BA method constructs a joint estimation model for both poses and landmarks, enabling the system to generate refined maps and reduce front-end localization errors. However, there are unique challenges when applying the BA for LiDAR data, due to the large volume of 3D points. Exploring a robust LiDAR BA estimator and achieving accurate solutions is a very important issue. In this work, firstly we propose a novel mean square group metric (MSGM) to build the optimization objective in the LiDAR BA algorithm. This metric applies mean square transformation to uniformly process the measurement of plane landmarks from one sampling period. The transformed metric ensures scale interpretability, and does not requie a time-consuming point-by-point calculation. Secondly, by integrating a robust kernel function, the metrics involved in the BA algorithm are reweighted, and thus enhancing the robustness of the solution process. Thirdly, based on the proposed robust LiDAR BA model, we derived an explicit second-order estimator (RSO-BA). This estimator employs analytical formulas for Hessian and gradient calculations, ensuring the precision of the BA solution. Finally, we verify the merits of the proposed RSO-BA estimator against existing implicit second-order and explicit approximate second-order estimators using the publicly available datasets. The experimental results demonstrate that the RSO-BA estimator outperforms its counterparts regarding registration accuracy and robustness, particularly in large-scale or complex unstructured environments.
Read more9/24/2024