PSS-BA: LiDAR Bundle Adjustment with Progressive Spatial Smoothing

0
Sign in to get full access
Overview
- Presents a method called PSS-BA for LiDAR bundle adjustment with progressive spatial smoothing
- Aims to efficiently and accurately estimate the pose and calibration parameters of LiDAR sensors
- Introduces a novel technique for progressive spatial smoothing to improve the accuracy and robustness of bundle adjustment
- Demonstrates the effectiveness of PSS-BA through extensive experiments on both synthetic and real-world datasets
Plain English Explanation
PSS-BA: LiDAR Bundle Adjustment with Progressive Spatial Smoothing is a research paper that introduces a new method for accurately estimating the position and orientation (pose) of LiDAR sensors, as well as their calibration parameters. LiDAR is a technology that uses laser light to create 3D maps of the environment.
The key innovation in this paper is a technique called "progressive spatial smoothing." This helps to improve the accuracy and robustness of the bundle adjustment process, which is a mathematical optimization method used to refine the estimated poses and calibration parameters of the LiDAR sensors.
The researchers demonstrate that their PSS-BA method outperforms existing approaches on both synthetic and real-world datasets. This suggests that it could be a valuable tool for applications that rely on accurate 3D mapping from LiDAR, such as autonomous vehicles, robotics, and surveying.
Technical Explanation
LiDAR Bundle Adjustment is the process of estimating the poses (position and orientation) and calibration parameters of LiDAR sensors by minimizing the discrepancies between the observed 3D points and the predicted 3D points based on the sensor parameters.
The PSS-BA method introduced in this paper combines bundle adjustment with a novel technique called "progressive spatial smoothing." This involves gradually smoothing the error function during the optimization process, which helps to improve the accuracy and robustness of the estimated parameters.
The researchers evaluate their method on both synthetic and real-world LiDAR datasets, comparing it to state-of-the-art approaches. The results show that PSS-BA outperforms existing methods in terms of pose estimation accuracy and robustness to noise and outliers.
Critical Analysis
The paper acknowledges some limitations of the PSS-BA method, such as the need for good initial estimates of the sensor parameters and the potential for the progressive smoothing to converge to a sub-optimal solution. The authors also suggest areas for future research, such as extending the method to handle dynamic scenes and integrating it with other sensor modalities like cameras.
While the results are promising, it would be valuable to see further validation of the method on a wider range of real-world datasets and applications. Additionally, the computational complexity of the optimization process could be an important factor to consider for real-time or resource-constrained scenarios.
Conclusion
PSS-BA presents a novel approach to LiDAR bundle adjustment that leverages progressive spatial smoothing to improve the accuracy and robustness of the estimated sensor poses and calibration parameters. The extensive experimental evaluation suggests this method could be a valuable tool for applications that rely on high-precision 3D mapping from LiDAR sensors, such as autonomous vehicles, robotics, and surveying. While the method has some limitations, the insights and techniques introduced in this paper could inspire further developments in this important area of research.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
PSS-BA: LiDAR Bundle Adjustment with Progressive Spatial Smoothing
Jianping Li, Thien-Minh Nguyen, Shenghai Yuan, Lihua Xie
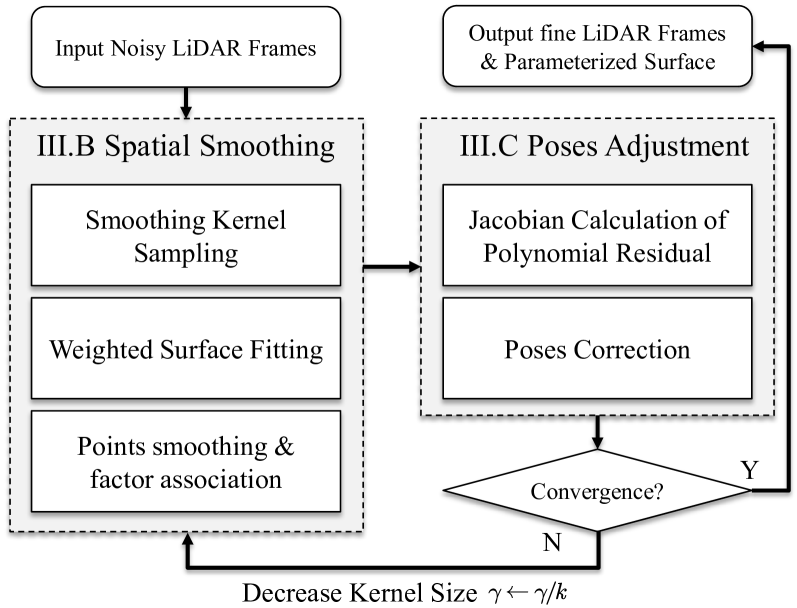
Accurate and consistent construction of point clouds from LiDAR scanning data is fundamental for 3D modeling applications. Current solutions, such as multiview point cloud registration and LiDAR bundle adjustment, predominantly depend on the local plane assumption, which may be inadequate in complex environments lacking of planar geometries or substantial initial pose errors. To mitigate this problem, this paper presents a LiDAR bundle adjustment with progressive spatial smoothing, which is suitable for complex environments and exhibits improved convergence capabilities. The proposed method consists of a spatial smoothing module and a pose adjustment module, which combines the benefits of local consistency and global accuracy. With the spatial smoothing module, we can obtain robust and rich surface constraints employing smoothing kernels across various scales. Then the pose adjustment module corrects all poses utilizing the novel surface constraints. Ultimately, the proposed method simultaneously achieves fine poses and parametric surfaces that can be directly employed for high-quality point cloud reconstruction. The effectiveness and robustness of our proposed approach have been validated on both simulation and real-world datasets. The experimental results demonstrate that the proposed method outperforms the existing methods and achieves better accuracy in complex environments with low planar structures.
Read more9/24/2024
🤖
0
Efficient and Consistent Bundle Adjustment on Lidar Point Clouds
Zheng Liu, Xiyuan Liu, Fu Zhang
Bundle Adjustment (BA) refers to the problem of simultaneous determination of sensor poses and scene geometry, which is a fundamental problem in robot vision. This paper presents an efficient and consistent bundle adjustment method for lidar sensors. The method employs edge and plane features to represent the scene geometry, and directly minimizes the natural Euclidean distance from each raw point to the respective geometry feature. A nice property of this formulation is that the geometry features can be analytically solved, drastically reducing the dimension of the numerical optimization. To represent and solve the resultant optimization problem more efficiently, this paper then proposes a novel concept {it point clusters}, which encodes all raw points associated to the same feature by a compact set of parameters, the {it point cluster coordinates}. We derive the closed-form derivatives, up to the second order, of the BA optimization based on the point cluster coordinates and show their theoretical properties such as the null spaces and sparsity. Based on these theoretical results, this paper develops an efficient second-order BA solver. Besides estimating the lidar poses, the solver also exploits the second order information to estimate the pose uncertainty caused by measurement noises, leading to consistent estimates of lidar poses. Moreover, thanks to the use of point cluster, the developed solver fundamentally avoids the enumeration of each raw point (which is very time-consuming due to the large number) in all steps of the optimization: cost evaluation, derivatives evaluation and uncertainty evaluation. The implementation of our method is open sourced to benefit the robotics community and beyond.
Read more6/18/2024

0
New!SGBA: Semantic Gaussian Mixture Model-Based LiDAR Bundle Adjustment
Xingyu Ji, Shenghai Yuan, Jianping Li, Pengyu Yin, Haozhi Cao, Lihua Xie
LiDAR bundle adjustment (BA) is an effective approach to reduce the drifts in pose estimation from the front-end. Existing works on LiDAR BA usually rely on predefined geometric features for landmark representation. This reliance restricts generalizability, as the system will inevitably deteriorate in environments where these specific features are absent. To address this issue, we propose SGBA, a LiDAR BA scheme that models the environment as a semantic Gaussian mixture model (GMM) without predefined feature types. This approach encodes both geometric and semantic information, offering a comprehensive and general representation adaptable to various environments. Additionally, to limit computational complexity while ensuring generalizability, we propose an adaptive semantic selection framework that selects the most informative semantic clusters for optimization by evaluating the condition number of the cost function. Lastly, we introduce a probabilistic feature association scheme that considers the entire probability density of assignments, which can manage uncertainties in measurement and initial pose estimation. We have conducted various experiments and the results demonstrate that SGBA can achieve accurate and robust pose refinement even in challenging scenarios with low-quality initial pose estimation and limited geometric features. We plan to open-source the work for the benefit of the community https://github.com/Ji1Xinyu/SGBA.
Read more10/3/2024

0
Explicit Second-order LiDAR Bundle Adjustment Algorithm Using Mean Squared Group Metric
Tingchen Ma, Yongsheng Ou, Sheng Xu
The bundle adjustment (BA) algorithm is a widely used nonlinear optimization technique in the backend of Simultaneous Localization and Mapping (SLAM) systems. By leveraging the co-view relationships of landmarks from multiple perspectives, the BA method constructs a joint estimation model for both poses and landmarks, enabling the system to generate refined maps and reduce front-end localization errors. However, there are unique challenges when applying the BA for LiDAR data, due to the large volume of 3D points. Exploring a robust LiDAR BA estimator and achieving accurate solutions is a very important issue. In this work, firstly we propose a novel mean square group metric (MSGM) to build the optimization objective in the LiDAR BA algorithm. This metric applies mean square transformation to uniformly process the measurement of plane landmarks from one sampling period. The transformed metric ensures scale interpretability, and does not requie a time-consuming point-by-point calculation. Secondly, by integrating a robust kernel function, the metrics involved in the BA algorithm are reweighted, and thus enhancing the robustness of the solution process. Thirdly, based on the proposed robust LiDAR BA model, we derived an explicit second-order estimator (RSO-BA). This estimator employs analytical formulas for Hessian and gradient calculations, ensuring the precision of the BA solution. Finally, we verify the merits of the proposed RSO-BA estimator against existing implicit second-order and explicit approximate second-order estimators using the publicly available datasets. The experimental results demonstrate that the RSO-BA estimator outperforms its counterparts regarding registration accuracy and robustness, particularly in large-scale or complex unstructured environments.
Read more9/24/2024