Efficient Data Collection for Robotic Manipulation via Compositional Generalization

0

Sign in to get full access
Overview
- The paper explores how to efficiently collect data for robotic manipulation tasks by leveraging compositional generalization.
- It proposes a method to learn compositional world models that can be used to generate diverse training data for robotic policies.
- The approach aims to reduce the amount of real-world data required to train effective manipulation policies.
Plain English Explanation
The paper investigates ways to efficiently train robots to perform manipulation tasks, like picking up and moving objects. One of the challenges in training robots is that they often need a lot of real-world data to learn how to do these tasks well. This can be time-consuming and expensive to collect.
The researchers propose a method that allows robots to learn "compositional" world models - models that can understand how different parts of a task or environment relate to each other. By learning these compositional models, the robots can use them to generate synthetic training data that covers a wide variety of situations, reducing the need for as much real-world data collection.
The key idea is to have the robots learn in a modular fashion, breaking down tasks into smaller components that can be recombined in novel ways. This compositional learning allows the robots to generalize beyond their training data and learn more efficiently.
The researchers test their approach on simulated robotic manipulation tasks and show that it can produce effective policies with less real-world data compared to standard methods. This suggests the approach could be a useful tool for developing more data-efficient robotic systems.
Technical Explanation
The key contribution of the paper is a method for learning compositional world models that can be used to efficiently collect training data for robotic manipulation policies. The approach builds on the idea of compositional generalization, where the model learns to understand how different elements of a task or environment relate to each other.
The researchers propose using a Variational Autoencoder (VAE) to learn a latent space representation of the robot's observations. This latent space is structured to be compositional, allowing the model to understand and recombine different elements.
The compositional world model is then used to generate diverse synthetic training data, which is used along with real-world data to train the robotic manipulation policy. The experiments show that this approach can produce effective policies with less real-world data compared to standard methods.
Critical Analysis
The paper presents a promising approach for reducing the data requirements of training robotic manipulation policies. The use of compositional world models is an interesting and potentially impactful idea, as it aligns with the broader goal of developing AI systems that can learn and generalize in more human-like ways.
However, the paper does not provide a thorough analysis of the limitations of the proposed method. For example, it's unclear how the approach would scale to more complex manipulation tasks or environments with significant visual clutter. Additionally, the paper does not discuss the potential challenges in learning accurate compositional world models, which could be a significant hurdle in practice.
Further research would be needed to better understand the strengths and weaknesses of this approach, as well as its applicability to real-world robotic systems. Careful evaluation of the method's performance on more diverse and challenging benchmarks would help establish its practical utility.
Conclusion
This paper presents an innovative approach for improving the data efficiency of training robotic manipulation policies. By leveraging the idea of compositional generalization and learning structured world models, the researchers demonstrate a method that can produce effective policies with less real-world data collection.
While the paper shows promising results, further research is needed to fully understand the limitations and scalability of the proposed approach. Nonetheless, the work represents an exciting step towards developing more data-efficient and versatile robotic systems that can learn and adapt in human-like ways.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Efficient Data Collection for Robotic Manipulation via Compositional Generalization
Jensen Gao, Annie Xie, Ted Xiao, Chelsea Finn, Dorsa Sadigh
Data collection has become an increasingly important problem in robotic manipulation, yet there still lacks much understanding of how to effectively collect data to facilitate broad generalization. Recent works on large-scale robotic data collection typically vary many environmental factors of variation (e.g., object types, table textures) during data collection, to cover a diverse range of scenarios. However, they do not explicitly account for the possible compositional abilities of policies trained on the data. If robot policies can compose environmental factors from their data to succeed when encountering unseen factor combinations, we can exploit this to avoid collecting data for situations that composition would address. To investigate this possibility, we conduct thorough empirical studies both in simulation and on a real robot that compare data collection strategies and assess whether visual imitation learning policies can compose environmental factors. We find that policies do exhibit composition, although leveraging prior robotic datasets is critical for this on a real robot. We use these insights to propose better in-domain data collection strategies that exploit composition, which can induce better generalization than naive approaches for the same amount of effort during data collection. We further demonstrate that a real robot policy trained on data from such a strategy achieves a success rate of 77.5% when transferred to entirely new environments that encompass unseen combinations of environmental factors, whereas policies trained using data collected without accounting for environmental variation fail to transfer effectively, with a success rate of only 2.5%. We provide videos at http://iliad.stanford.edu/robot-data-comp/.
Read more5/22/2024
🎲
0
PoCo: Policy Composition from and for Heterogeneous Robot Learning
Lirui Wang, Jialiang Zhao, Yilun Du, Edward H. Adelson, Russ Tedrake
Training general robotic policies from heterogeneous data for different tasks is a significant challenge. Existing robotic datasets vary in different modalities such as color, depth, tactile, and proprioceptive information, and collected in different domains such as simulation, real robots, and human videos. Current methods usually collect and pool all data from one domain to train a single policy to handle such heterogeneity in tasks and domains, which is prohibitively expensive and difficult. In this work, we present a flexible approach, dubbed Policy Composition, to combine information across such diverse modalities and domains for learning scene-level and task-level generalized manipulation skills, by composing different data distributions represented with diffusion models. Our method can use task-level composition for multi-task manipulation and be composed with analytic cost functions to adapt policy behaviors at inference time. We train our method on simulation, human, and real robot data and evaluate in tool-use tasks. The composed policy achieves robust and dexterous performance under varying scenes and tasks and outperforms baselines from a single data source in both simulation and real-world experiments. See https://liruiw.github.io/policycomp for more details .
Read more5/28/2024
🏅
0
Robotic Manipulation Datasets for Offline Compositional Reinforcement Learning
Marcel Hussing, Jorge A. Mendez, Anisha Singrodia, Cassandra Kent, Eric Eaton
Offline reinforcement learning (RL) is a promising direction that allows RL agents to pre-train on large datasets, avoiding the recurrence of expensive data collection. To advance the field, it is crucial to generate large-scale datasets. Compositional RL is particularly appealing for generating such large datasets, since 1)~it permits creating many tasks from few components, 2)~the task structure may enable trained agents to solve new tasks by combining relevant learned components, and 3)~the compositional dimensions provide a notion of task relatedness. This paper provides four offline RL datasets for simulated robotic manipulation created using the $256$ tasks from CompoSuite [Mendez at al., 2022a]. Each dataset is collected from an agent with a different degree of performance, and consists of $256$ million transitions. We provide training and evaluation settings for assessing an agent's ability to learn compositional task policies. Our benchmarking experiments show that current offline RL methods can learn the training tasks to some extent and that compositional methods outperform non-compositional methods. Yet current methods are unable to extract the compositional structure to generalize to unseen tasks, highlighting a need for future research in offline compositional RL.
Read more7/16/2024
0
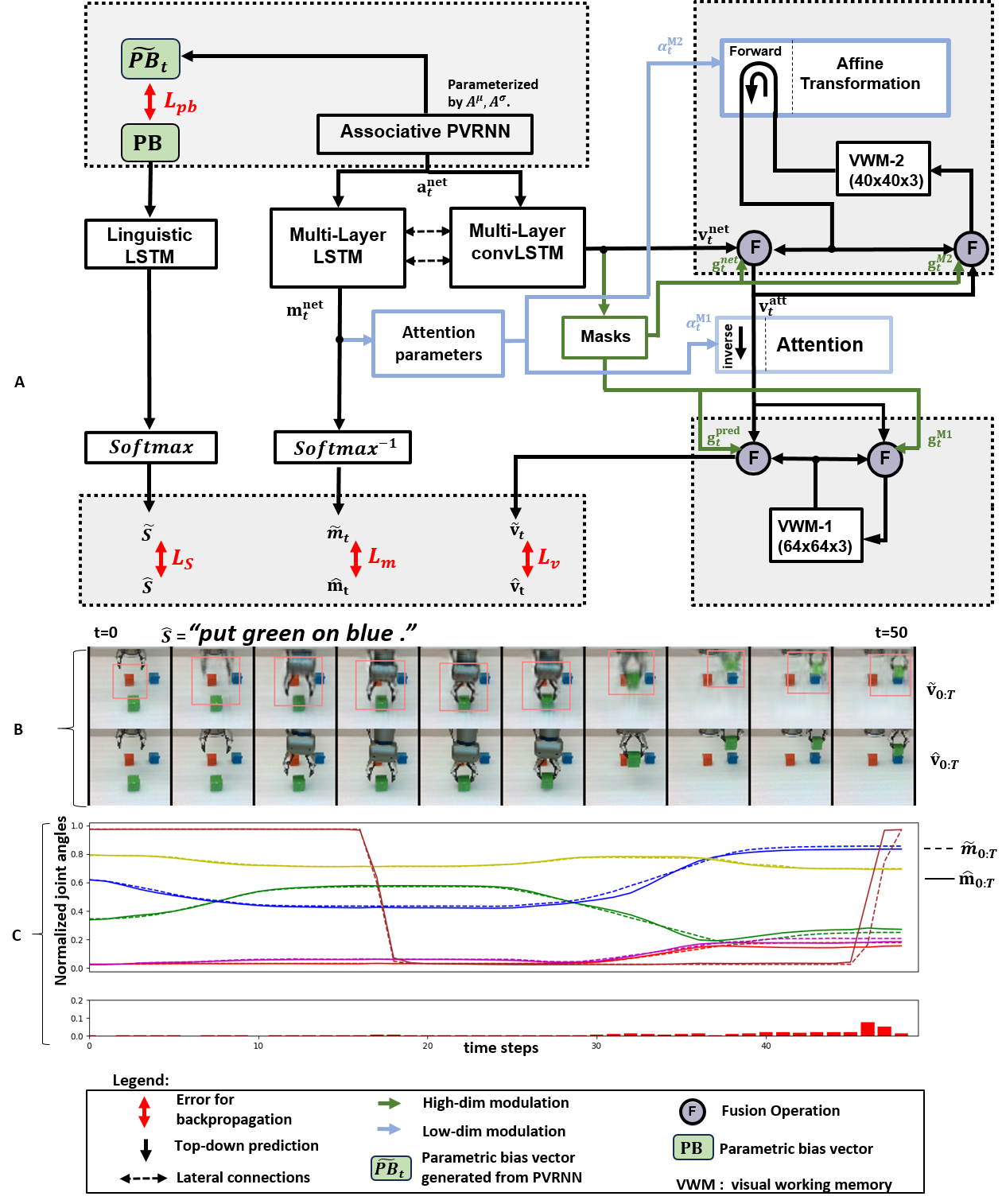
Development of Compositionality and Generalization through Interactive Learning of Language and Action of Robots
Prasanna Vijayaraghavan, Jeffrey Frederic Queisser, Sergio Verduzco Flores, Jun Tani
Humans excel at applying learned behavior to unlearned situations. A crucial component of this generalization behavior is our ability to compose/decompose a whole into reusable parts, an attribute known as compositionality. One of the fundamental questions in robotics concerns this characteristic. How can linguistic compositionality be developed concomitantly with sensorimotor skills through associative learning, particularly when individuals only learn partial linguistic compositions and their corresponding sensorimotor patterns? To address this question, we propose a brain-inspired neural network model that integrates vision, proprioception, and language into a framework of predictive coding and active inference, based on the free-energy principle. The effectiveness and capabilities of this model were assessed through various simulation experiments conducted with a robot arm. Our results show that generalization in learning to unlearned verb-noun compositions, is significantly enhanced when training variations of task composition are increased. We attribute this to self-organized compositional structures in linguistic latent state space being influenced significantly by sensorimotor learning. Ablation studies show that visual attention and working memory are essential to accurately generate visuo-motor sequences to achieve linguistically represented goals. These insights advance our understanding of mechanisms underlying development of compositionality through interactions of linguistic and sensorimotor experience.
Read more7/24/2024