An Efficient Deep Reinforcement Learning Model for Online 3D Bin Packing Combining Object Rearrangement and Stable Placement

0

Sign in to get full access
Overview
- This paper presents a deep reinforcement learning model for solving the 3D bin packing problem in an online setting.
- The model combines object rearrangement and stable placement strategies to efficiently pack objects into a 3D bin.
- The researchers evaluate their model on a variety of benchmark datasets and show that it outperforms existing methods.
Plain English Explanation
The 3D bin packing problem is a challenging task where you need to fit a set of 3D objects into a larger 3D container or "bin" as efficiently as possible. This is important for applications like cargo loading, warehouse management, and 3D printing.
The researchers in this paper developed a new deep learning model to solve this problem. Their key insight was to combine two strategies: object rearrangement and stable placement.
Object rearrangement allows the model to move objects around inside the bin to find better arrangements. Stable placement ensures that the final arrangement of objects is sturdy and balanced, preventing things from falling over.
By integrating these two strategies, the model was able to pack objects much more efficiently than previous approaches. The researchers tested it on several standard benchmarks and showed it outperformed existing methods.
Technical Explanation
The researchers formulated the 3D bin packing problem as a reinforcement learning task. They developed a deep neural network policy that takes the current state of the bin as input and outputs actions to place or rearrange objects.
The state representation encodes information about the bin's dimensions, the objects waiting to be packed, and the current arrangement of objects inside the bin. The action space includes placing an object, rearranging an object, or doing nothing.
The model was trained using proximal policy optimization, a reinforcement learning algorithm that learns a stochastic policy. During training, the model learns to balance the objectives of maximizing space utilization and maintaining stable placements.
The researchers also incorporated several specialized modules into their architecture, such as a rearrangement network and a stability prediction network. These components allow the model to reason about object rearrangement and placement stability.
Critical Analysis
The researchers acknowledge several limitations of their approach. First, their model assumes that the dimensions of all objects are known in advance, which may not always be the case in real-world scenarios. Incorporating techniques for handling unknown object dimensions could further improve the model's practicality.
Additionally, the model's performance may degrade as the number of objects or the size of the bin increases. Exploring ways to scale the approach to handle larger problem instances would be an interesting direction for future research.
While the results on benchmark datasets are promising, further evaluation on more diverse and realistic 3D packing tasks would help validate the model's broader applicability. Physics-aware planning techniques could also be integrated to better account for physical constraints during the packing process.
Conclusion
This paper presents an efficient deep reinforcement learning model for solving the 3D bin packing problem in an online setting. By combining object rearrangement and stable placement strategies, the model is able to pack objects more effectively than previous approaches.
The researchers' work demonstrates the potential of reinforcement learning to tackle complex real-world optimization problems. The insights and techniques developed in this paper could have broader applications in areas like logistics, manufacturing, and robotic manipulation.
Overall, this research contributes to the ongoing efforts to develop intelligent systems that can efficiently manage and optimize the use of physical space, which has important implications for various industries and applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
An Efficient Deep Reinforcement Learning Model for Online 3D Bin Packing Combining Object Rearrangement and Stable Placement
Peiwen Zhou, Ziyan Gao, Chenghao Li, Nak Young Chong
This paper presents an efficient deep reinforcement learning (DRL) framework for online 3D bin packing (3D-BPP). The 3D-BPP is an NP-hard problem significant in logistics, warehousing, and transportation, involving the optimal arrangement of objects inside a bin. Traditional heuristic algorithms often fail to address dynamic and physical constraints in real-time scenarios. We introduce a novel DRL framework that integrates a reliable physics heuristic algorithm and object rearrangement and stable placement. Our experiment show that the proposed framework achieves higher space utilization rates effectively minimizing the amount of wasted space with fewer training epochs.
Read more8/20/2024

0
GOPT: Generalizable Online 3D Bin Packing via Transformer-based Deep Reinforcement Learning
Heng Xiong, Changrong Guo, Jian Peng, Kai Ding, Wenjie Chen, Xuchong Qiu, Long Bai, Jianfeng Xu
Robotic object packing has broad practical applications in the logistics and automation industry, often formulated by researchers as the online 3D Bin Packing Problem (3D-BPP). However, existing DRL-based methods primarily focus on enhancing performance in limited packing environments while neglecting the ability to generalize across multiple environments characterized by different bin dimensions. To this end, we propose GOPT, a generalizable online 3D Bin Packing approach via Transformer-based deep reinforcement learning (DRL). First, we design a Placement Generator module to yield finite subspaces as placement candidates and the representation of the bin. Second, we propose a Packing Transformer, which fuses the features of the items and bin, to identify the spatial correlation between the item to be packed and available sub-spaces within the bin. Coupling these two components enables GOPT's ability to perform inference on bins of varying dimensions. We conduct extensive experiments and demonstrate that GOPT not only achieves superior performance against the baselines, but also exhibits excellent generalization capabilities. Furthermore, the deployment with a robot showcases the practical applicability of our method in the real world. The source code will be publicly available at https://github.com/Xiong5Heng/GOPT.
Read more9/14/2024
0
Mitigating Dimensionality in 2D Rectangle Packing Problem under Reinforcement Learning Schema
Waldemar Ko{l}odziejczyk, Mariusz Kaleta
This paper explores the application of Reinforcement Learning (RL) to the two-dimensional rectangular packing problem. We propose a reduced representation of the state and action spaces that allow us for high granularity. Leveraging UNet architecture and Proximal Policy Optimization (PPO), we achieved a model that is comparable to the MaxRect heuristic. However, our approach has great potential to be generalized to nonrectangular packing problems and complex constraints.
Read more9/17/2024
0
Constrained Object Placement Using Reinforcement Learning
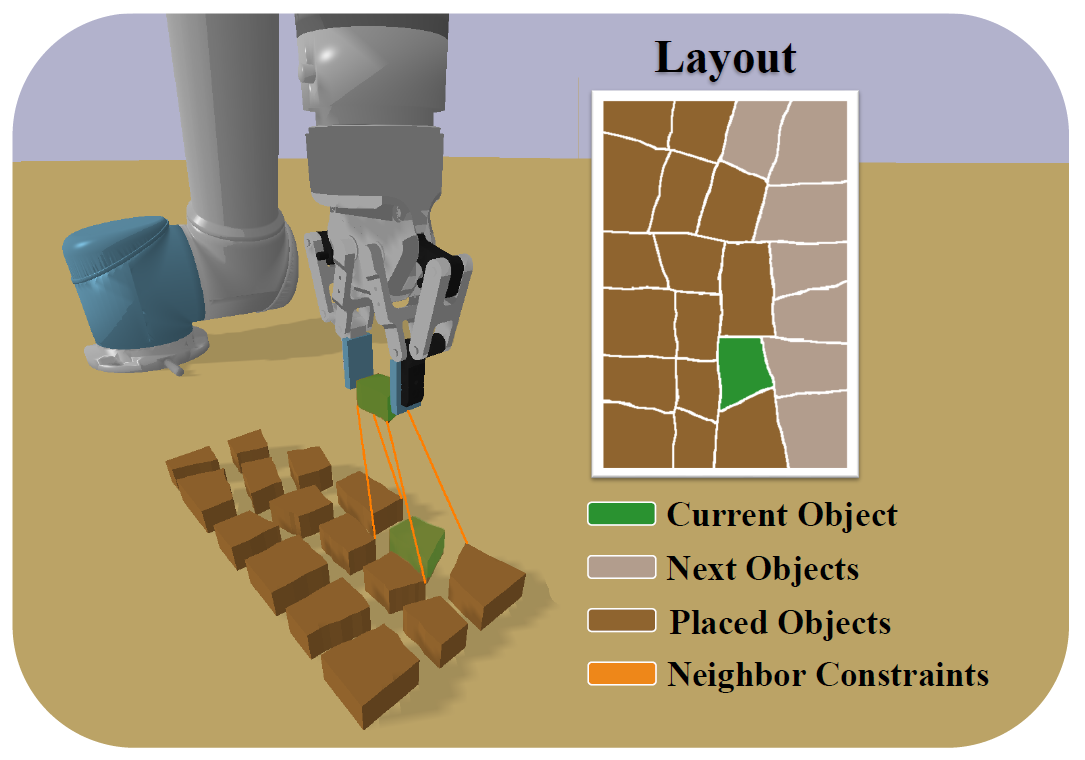
Benedikt Kreis, Nils Dengler, Jorge de Heuvel, Rohit Menon, Hamsa Datta Perur, Maren Bennewitz
Close and precise placement of irregularly shaped objects requires a skilled robotic system. The manipulation of objects that have sensitive top surfaces and a fixed set of neighbors is particularly challenging. To avoid damaging the surface, the robot has to grasp them from the side, and during placement, it has to maintain the spatial relations with adjacent objects, while considering the physical gripper extent. In this work, we propose a framework to learn an agent based on reinforcement learning that generates end-effector motions to place objects as close as possible next to each other. During the placement, our agent considers the spatial constraints with neighbors defined in a given layout of the objects while avoiding collisions. Our approach learns to place compact object assemblies without the need for predefined spacing between objects as required by traditional methods. We thoroughly evaluated our approach using a two-finger gripper mounted on a robotic arm with six degrees of freedom. The results show that our agent significantly outperforms two baseline approaches in object assembly compactness, thereby reducing the space required to place the objects according to the specified spatial constraints with the neighboring placed objects.
Read more7/19/2024