Constrained Object Placement Using Reinforcement Learning

0
Sign in to get full access
Overview
- This paper presents a reinforcement learning-based approach for constrained object placement in 3D environments.
- The proposed method allows for the efficient placement of objects while satisfying various constraints, such as collision avoidance and stability.
- The authors demonstrate the effectiveness of their approach through simulation experiments and real-world robotic applications.
Plain English Explanation
The paper discusses a way to use reinforcement learning to help robots place objects in 3D spaces while following certain rules or constraints. Reinforcement learning is a type of machine learning where the robot learns by trial and error, getting rewards for good actions and punishments for bad ones.
The key idea is that the robot can learn how to place objects in a way that satisfies various requirements, such as not letting the object collide with other objects or making sure the object is stable and won't fall over. This is important for real-world applications like robotic assembly or household tasks where objects need to be placed carefully.
The authors show that their reinforcement learning-based approach can effectively place objects in simulated 3D environments and also work on real robotic systems. This demonstrates the potential of this technique to be used in practical robotics applications that require precise and constrained object placement.
Technical Explanation
The paper introduces a reinforcement learning-based framework for [object Object] in 3D environments. The key components of the approach include:
- State Representation: The robot's state is represented using a combination of the object's position, orientation, and additional features such as collision avoidance and stability constraints.
- Action Space: The action space consists of continuous adjustments to the object's position and orientation to satisfy the placement constraints.
- Reward Function: The reward function encourages the placement of objects in a way that minimizes collisions, maintains stability, and aligns with the desired goal configuration.
- Learning Algorithm: The authors use a [object Object] algorithm to train the robot to learn the optimal placement policies.
The proposed method is evaluated through extensive simulation experiments and real-world robotic applications, demonstrating its effectiveness in handling various constraint scenarios and its potential for practical use in tasks such as [object Object] and household object placement.
Critical Analysis
The paper presents a promising approach for constrained object placement using reinforcement learning. However, the authors acknowledge several limitations and areas for future research:
- The current framework assumes known object shapes and environments, which may not always be the case in real-world scenarios. Incorporating [object Object] could further improve the robustness of the system.
- The training process can be computationally expensive, especially for complex environments with many constraints. Exploring more efficient [object Object] techniques could help reduce the training time.
- The paper focuses on static object placement, but [object Object] scenarios, such as placing objects while avoiding moving obstacles, could be an interesting area for future research.
Overall, the proposed approach shows promising results and paves the way for further advancements in the field of constrained object placement using reinforcement learning.
Conclusion
This paper presents a reinforcement learning-based framework for constrained object placement in 3D environments. The key contributions include a novel state representation, action space, and reward function that enable the robot to learn optimal placement policies while satisfying various constraints, such as collision avoidance and stability.
The authors demonstrate the effectiveness of their approach through extensive simulation experiments and real-world robotic applications, showcasing the potential of this technique for practical use in tasks like robotic assembly and household object placement. While the current framework has some limitations, the paper highlights opportunities for future research, such as incorporating uncertainty-aware object detection and exploring dynamic placement scenarios.
Overall, this work advances the state-of-the-art in constrained object placement and provides a valuable foundation for further developments in the field of reinforcement learning-based robotic manipulation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Constrained Object Placement Using Reinforcement Learning
Benedikt Kreis, Nils Dengler, Jorge de Heuvel, Rohit Menon, Hamsa Datta Perur, Maren Bennewitz
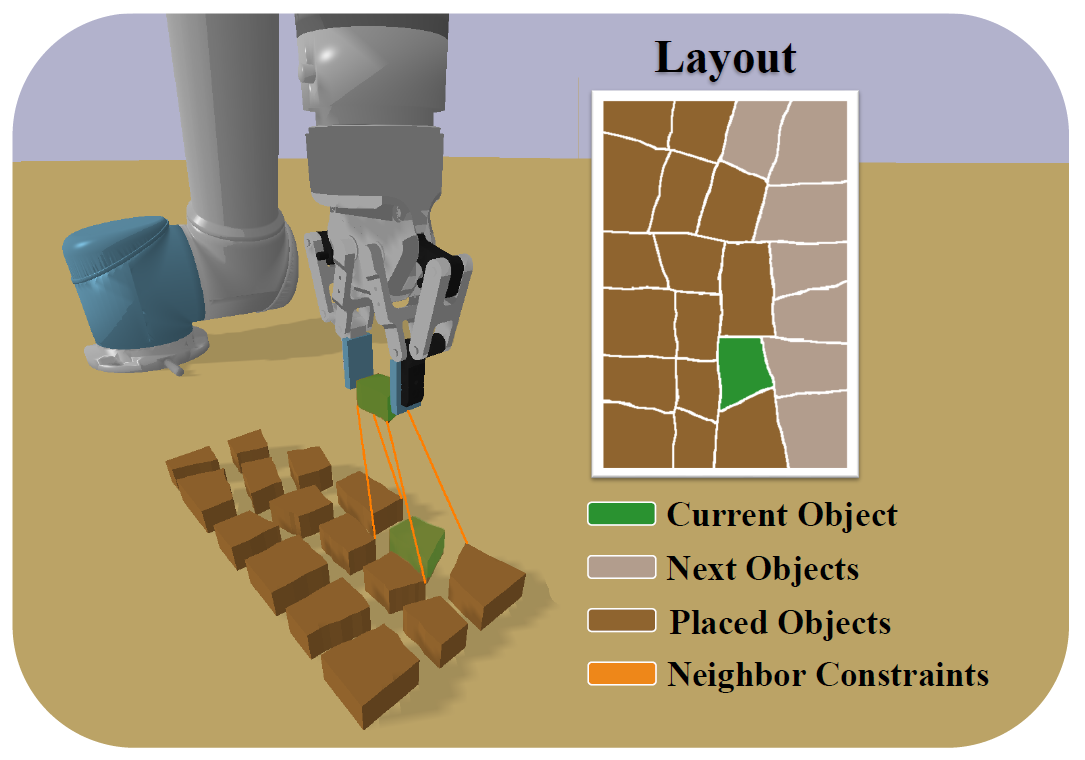
Close and precise placement of irregularly shaped objects requires a skilled robotic system. The manipulation of objects that have sensitive top surfaces and a fixed set of neighbors is particularly challenging. To avoid damaging the surface, the robot has to grasp them from the side, and during placement, it has to maintain the spatial relations with adjacent objects, while considering the physical gripper extent. In this work, we propose a framework to learn an agent based on reinforcement learning that generates end-effector motions to place objects as close as possible next to each other. During the placement, our agent considers the spatial constraints with neighbors defined in a given layout of the objects while avoiding collisions. Our approach learns to place compact object assemblies without the need for predefined spacing between objects as required by traditional methods. We thoroughly evaluated our approach using a two-finger gripper mounted on a robotic arm with six degrees of freedom. The results show that our agent significantly outperforms two baseline approaches in object assembly compactness, thereby reducing the space required to place the objects according to the specified spatial constraints with the neighboring placed objects.
Read more7/19/2024

0
An Efficient Multi-Robot Arm Coordination Strategy for Pick-and-Place Tasks using Reinforcement Learning
Tizian Jermann, Hendrik Kolvenbach, Fidel Esquivel Estay, Koen Kramer, Marco Hutter
We introduce a novel strategy for multi-robot sorting of waste objects using Reinforcement Learning. Our focus lies on finding optimal picking strategies that facilitate an effective coordination of a multi-robot system, subject to maximizing the waste removal potential. We realize this by formulating the sorting problem as an OpenAI gym environment and training a neural network with a deep reinforcement learning algorithm. The objective function is set up to optimize the picking rate of the robotic system. In simulation, we draw a performance comparison to an intuitive combinatorial game theory-based approach. We show that the trained policies outperform the latter and achieve up to 16% higher picking rates. Finally, the respective algorithms are validated on a hardware setup consisting of a two-robot sorting station able to process incoming waste objects through pick-and-place operations.
Read more9/23/2024
0
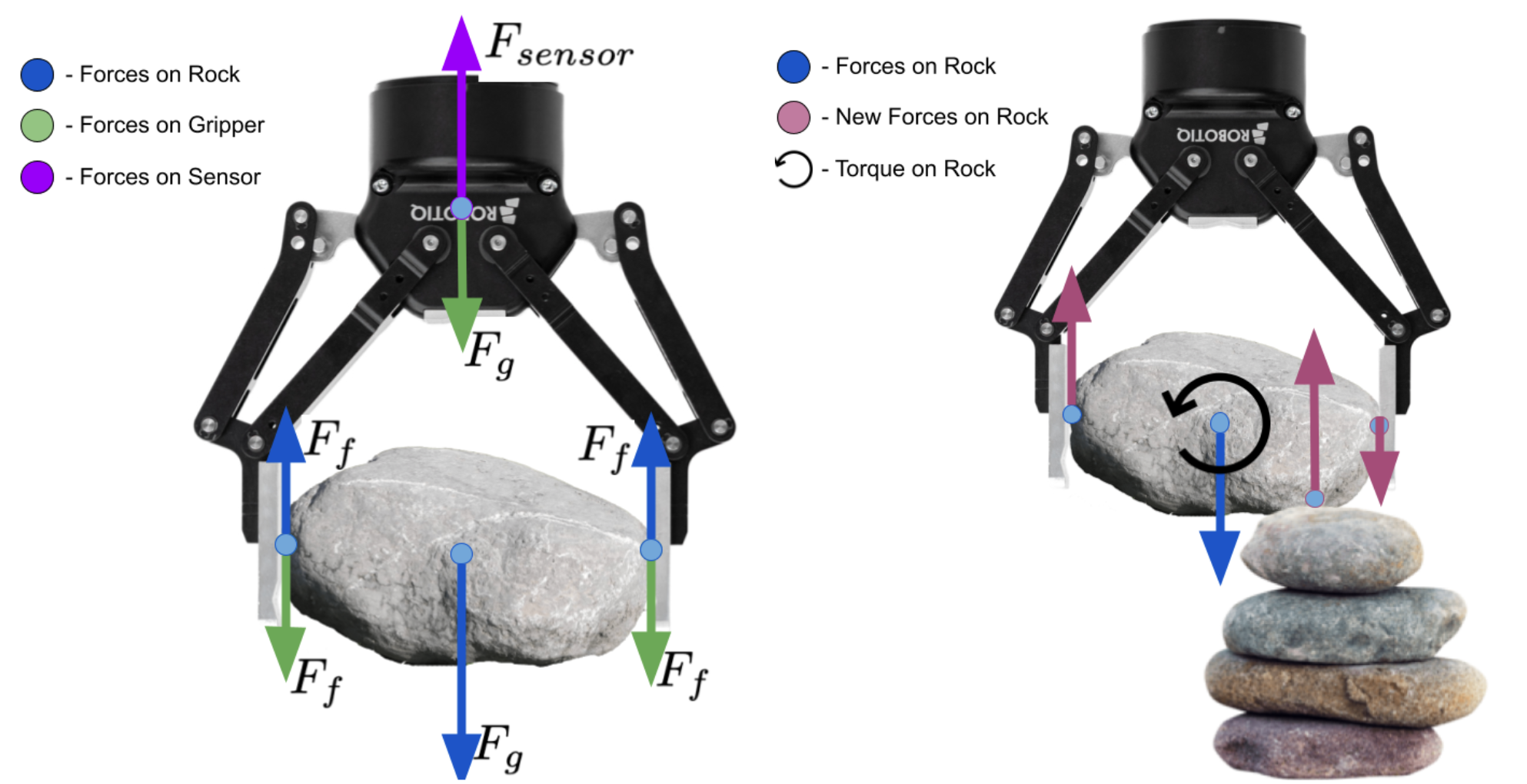
Precise Object Placement Using Force-Torque Feedback
Osher Lerner, Zachary Tam, Michael Equi
Precise object manipulation and placement is a common problem for household robots, surgery robots, and robots working on in-situ construction. Prior work using computer vision, depth sensors, and reinforcement learning lacks the ability to reactively recover from planning errors, execution errors, or sensor noise. This work introduces a method that uses force-torque sensing to robustly place objects in stable poses, even in adversarial environments. On 46 trials, our method finds success rates of 100% for basic stacking, and 17% for cases requiring adjustment.
Read more4/30/2024

0
Planning Robot Placement for Object Grasping
Manish Saini, Melvin Paul Jacob, Minh Nguyen, Nico Hochgeschwender
When performing manipulation-based activities such as picking objects, a mobile robot needs to position its base at a location that supports successful execution. To address this problem, prominent approaches typically rely on costly grasp planners to provide grasp poses for a target object, which are then are then analysed to identify the best robot placements for achieving each grasp pose. In this paper, we propose instead to first find robot placements that would not result in collision with the environment and from where picking up the object is feasible, then evaluate them to find the best placement candidate. Our approach takes into account the robot's reachability, as well as RGB-D images and occupancy grid maps of the environment for identifying suitable robot poses. The proposed algorithm is embedded in a service robotic workflow, in which a person points to select the target object for grasping. We evaluate our approach with a series of grasping experiments, against an existing baseline implementation that sends the robot to a fixed navigation goal. The experimental results show how the approach allows the robot to grasp the target object from locations that are very challenging to the baseline implementation.
Read more5/28/2024