Efficient Hybrid Neuromorphic-Bayesian Model for Olfaction Sensing: Detection and Classification

0

Sign in to get full access
Overview
- This paper presents a hybrid neuromorphic-Bayesian model for efficient olfaction sensing, covering detection and classification tasks.
- The model combines neuromorphic and Bayesian approaches to achieve high-speed odor sensing and classification.
- Experiments demonstrate the model's capabilities in detecting and classifying various odor samples.
Plain English Explanation
The paper describes a new system for detecting and identifying different scents or odors. This system uses a combination of two approaches: neuromorphic computing and Bayesian analysis.
Neuromorphic computing is inspired by the way the human brain processes information. It uses specialized hardware and algorithms that mimic the brain's neural networks. This allows the system to quickly and efficiently process sensory data, like the signals from odor sensors.
The Bayesian approach is a statistical method that allows the system to make inferences and classify odors based on the sensor data. By combining these two techniques, the researchers created a hybrid model that can detect the presence of different odors and then accurately identify what they are.
The paper shows that this hybrid model performs well in experiments, accurately detecting and classifying a variety of odor samples. This suggests it could be a useful tool for applications like industrial monitoring, medical diagnosis, or food and beverage quality control.
Technical Explanation
The paper presents a hybrid neuromorphic-Bayesian model for efficient olfaction sensing, including both detection and classification capabilities. The neuromorphic component utilizes specialized hardware and algorithms inspired by the brain's neural networks to rapidly process sensory data from odor sensors. This is combined with a Bayesian statistical approach that allows the system to classify the detected odors based on the sensor data.
The experimental results demonstrate the model's performance in detecting the presence of various odors and accurately identifying their sources. The hybrid approach leverages the strengths of both neuromorphic and Bayesian techniques to achieve high-speed, accurate odor sensing and classification.
This work builds on previous research in areas like olfaction-based machine learning and aroma chemical analysis, advancing the state of the art in efficient, high-performance olfaction sensing systems.
Critical Analysis
The paper presents a compelling hybrid approach that leverages the strengths of both neuromorphic and Bayesian techniques to achieve efficient olfaction sensing. The experimental results demonstrate the model's capabilities in accurately detecting and classifying various odor samples.
However, the paper does not extensively discuss potential limitations or caveats of the proposed approach. For example, it would be helpful to understand how the model performs under different environmental conditions, such as varying temperature or humidity, which can impact sensor data. Additionally, the paper could explore the model's scalability and the challenges of deploying it in real-world scenarios with a large number of sensors and odor sources.
Further research could also investigate ways to improve the model's interpretability, allowing users to better understand the decision-making process and the specific features the model uses to classify odors. This could lead to insights that inform the design of more robust and adaptable olfaction sensing systems.
Conclusion
This paper presents an efficient hybrid neuromorphic-Bayesian model for olfaction sensing, combining the strengths of both approaches to achieve high-speed odor detection and classification. The experimental results demonstrate the model's capabilities, suggesting its potential for applications in industrial monitoring, medical diagnosis, and food/beverage quality control.
While the paper does not extensively discuss limitations or areas for further research, the proposed approach represents an important step forward in developing advanced olfaction sensing systems that can accurately and rapidly identify a wide range of odors. As the field of olfaction-based machine learning continues to evolve, this work provides a valuable contribution to the ongoing efforts to create more efficient and practical solutions for real-world odor sensing and classification tasks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Efficient Hybrid Neuromorphic-Bayesian Model for Olfaction Sensing: Detection and Classification
Rizwana Kausar, Fakhreddine Zayer, Jaime Viegas, Jorge Dias
Olfaction sensing in autonomous robotics faces challenges in dynamic operations, energy efficiency, and edge processing. It necessitates a machine learning algorithm capable of managing real-world odor interference, ensuring resource efficiency for mobile robotics, and accurately estimating gas features for critical tasks such as odor mapping, localization, and alarm generation. This paper introduces a hybrid approach that exploits neuromorphic computing in combination with probabilistic inference to address these demanding requirements. Our approach implements a combination of a convolutional spiking neural network for feature extraction and a Bayesian spiking neural network for odor detection and identification. The developed algorithm is rigorously tested on a dataset for sensor drift compensation for robustness evaluation. Additionally, for efficiency evaluation, we compare the energy consumption of our model with a non-spiking machine learning algorithm under identical dataset and operating conditions. Our approach demonstrates superior efficiency alongside comparable accuracy outcomes.
Read more7/9/2024

0
High-speed odour sensing using miniaturised electronic nose
Nik Dennler, Damien Drix, Tom P. A. Warner, Shavika Rastogi, Cecilia Della Casa, Tobias Ackels, Andreas T. Schaefer, Andr'e van Schaik, Michael Schmuker
Animals have evolved to rapidly detect and recognise brief and intermittent encounters with odour packages, exhibiting recognition capabilities within milliseconds. Artificial olfaction has faced challenges in achieving comparable results -- existing solutions are either slow; or bulky, expensive, and power-intensive -- limiting applicability in real-world scenarios for mobile robotics. Here we introduce a miniaturised high-speed electronic nose; characterised by high-bandwidth sensor readouts, tightly controlled sensing parameters and powerful algorithms. The system is evaluated on a high-fidelity odour delivery benchmark. We showcase successful classification of tens-of-millisecond odour pulses, and demonstrate temporal pattern encoding of stimuli switching with up to 60 Hz. Those timescales are unprecedented in miniaturised low-power settings, and demonstrably exceed the performance observed in mice. For the first time, it is possible to match the temporal resolution of animal olfaction in robotic systems. This will allow for addressing challenges in environmental and industrial monitoring, security, neuroscience, and beyond.
Read more6/6/2024
📊
0
Data Science In Olfaction
Vivek Agarwal, Joshua Harvey, Dmitry Rinberg, Vasant Dhar
Advances in neural sensing technology are making it possible to observe the olfactory process in great detail. In this paper, we conceptualize smell from a Data Science and AI perspective, that relates the properties of odorants to how they are sensed and analyzed in the olfactory system from the nose to the brain. Drawing distinctions to color vision, we argue that smell presents unique measurement challenges, including the complexity of stimuli, the high dimensionality of the sensory apparatus, as well as what constitutes ground truth. In the face of these challenges, we argue for the centrality of odorant-receptor interactions in developing a theory of olfaction. Such a theory is likely to find widespread industrial applications, and enhance our understanding of smell, and in the longer-term, how it relates to other senses and language. As an initial use case of the data, we present results using machine learning-based classification of neural responses to odors as they are recorded in the mouse olfactory bulb with calcium imaging.
Read more4/9/2024
0
A compact neuromorphic system for ultra energy-efficient, on-device robot localization
Adam D. Hines, Michael Milford, Tobias Fischer
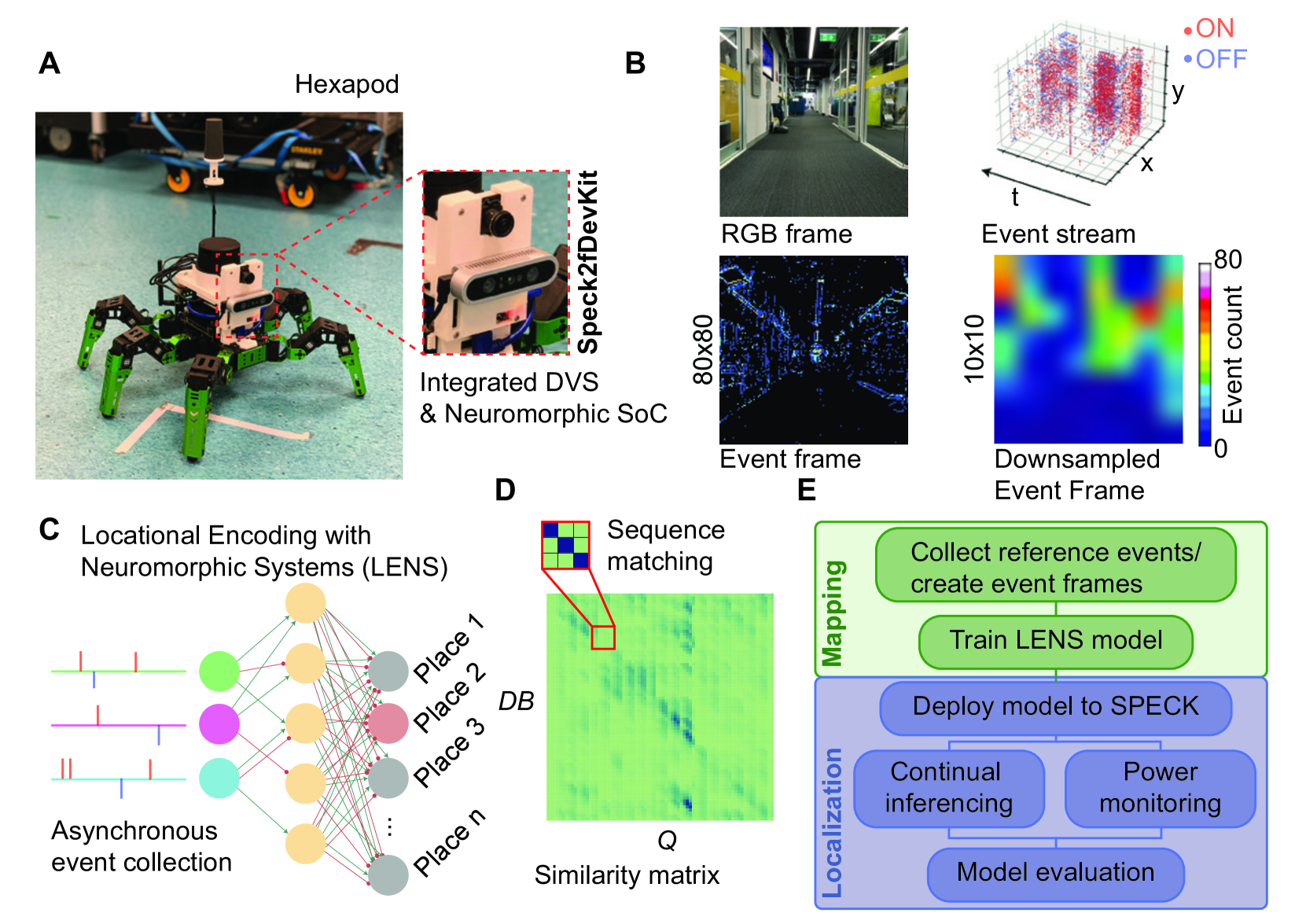
Neuromorphic computing offers a transformative pathway to overcome the computational and energy challenges faced in deploying robotic localization and navigation systems at the edge. Visual place recognition, a critical component for navigation, is often hampered by the high resource demands of conventional systems, making them unsuitable for small-scale robotic platforms which still require to perform complex, long-range tasks. Although neuromorphic approaches offer potential for greater efficiency, real-time edge deployment remains constrained by the complexity and limited scalability of bio-realistic networks. Here, we demonstrate a neuromorphic localization system that performs accurate place recognition in up to 8km of traversal using models as small as 180 KB with 44k parameters, while consuming less than 1% of the energy required by conventional methods. Our Locational Encoding with Neuromorphic Systems (LENS) integrates spiking neural networks, an event-based dynamic vision sensor, and a neuromorphic processor within a single SPECK(TM) chip, enabling real-time, energy-efficient localization on a hexapod robot. LENS represents the first fully neuromorphic localization system capable of large-scale, on-device deployment, setting a new benchmark for energy efficient robotic place recognition.
Read more8/30/2024