A compact neuromorphic system for ultra energy-efficient, on-device robot localization

0
Sign in to get full access
Overview
- This paper presents a compact, energy-efficient neuromorphic system for robot localization.
- The system uses spiking neural networks to perform real-time place recognition and self-localization on a low-power embedded platform.
- Key innovations include a novel spiking neural network architecture and training approach that enable efficient, low-latency place recognition.
Plain English Explanation
The researchers have developed a small, low-power neuromorphic system that can help robots figure out where they are. This system uses a type of artificial intelligence called "spiking neural networks" that is inspired by how the brain works.
The key idea is that the system can recognize places the robot has been to before, allowing it to localize itself very efficiently and with minimal power usage. This is important for robots that need to operate for long periods of time without recharging, like industrial robots or mobile robots navigating complex environments.
The researchers developed a novel spiking neural network architecture and training approach to make this system work well. This allows the robot to quickly recognize places it has seen before, even with limited computing power and energy.
Technical Explanation
The paper presents a neuromorphic system for robot localization that uses spiking neural networks running on a low-power embedded platform. The key innovations include:
- A novel spiking neural network architecture designed for efficient place recognition, with a hierarchical structure that learns features at multiple scales.
- A training approach that leverages unsupervised learning to extract robust, discriminative place features from visual inputs, enabling rapid, low-latency place recognition.
- Integration of the spiking neural network with other localization modules, such as wheel odometry, to enable robust, real-time self-localization on the embedded platform.
The system was evaluated on several robot localization benchmarks, demonstrating its ability to achieve state-of-the-art performance while consuming orders of magnitude less power than traditional GPU-based approaches. This makes it well-suited for long-term robot autonomy in mobile and industrial applications.
Critical Analysis
The paper presents a compelling solution for enabling energy-efficient, real-time robot localization using spiking neural networks. The novel architecture and training approach appear to be well-designed and effective, as demonstrated by the strong experimental results.
One potential limitation is the reliance on visual inputs for place recognition, which could be vulnerable to changes in lighting or occlusions. The authors mention the integration of other sensor modalities, such as wheel odometry, but it would be interesting to see how the system performs under more challenging environmental conditions.
Additionally, while the power consumption of the neuromorphic system is impressively low, the authors do not provide a detailed comparison to alternative low-power approaches, such as embedded vision systems or custom ASIC designs. A more comprehensive evaluation of the system's energy efficiency and performance trade-offs would help contextualize the contributions.
Overall, this work represents an important step towards enabling energy-efficient, on-device robot localization using neuromorphic computing. Further research and development in this area could have significant implications for the deployment of autonomous robots in a wide range of applications.
Conclusion
This paper presents a novel neuromorphic system for energy-efficient, real-time robot localization. The key innovations include a spiking neural network architecture and training approach that enable rapid place recognition on a low-power embedded platform.
The system's ability to achieve state-of-the-art performance while consuming orders of magnitude less power than traditional approaches makes it a promising solution for enabling long-term robot autonomy in mobile and industrial applications. Further research and development in this area could have significant implications for the deployment of autonomous robots in a wide range of settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A compact neuromorphic system for ultra energy-efficient, on-device robot localization
Adam D. Hines, Michael Milford, Tobias Fischer
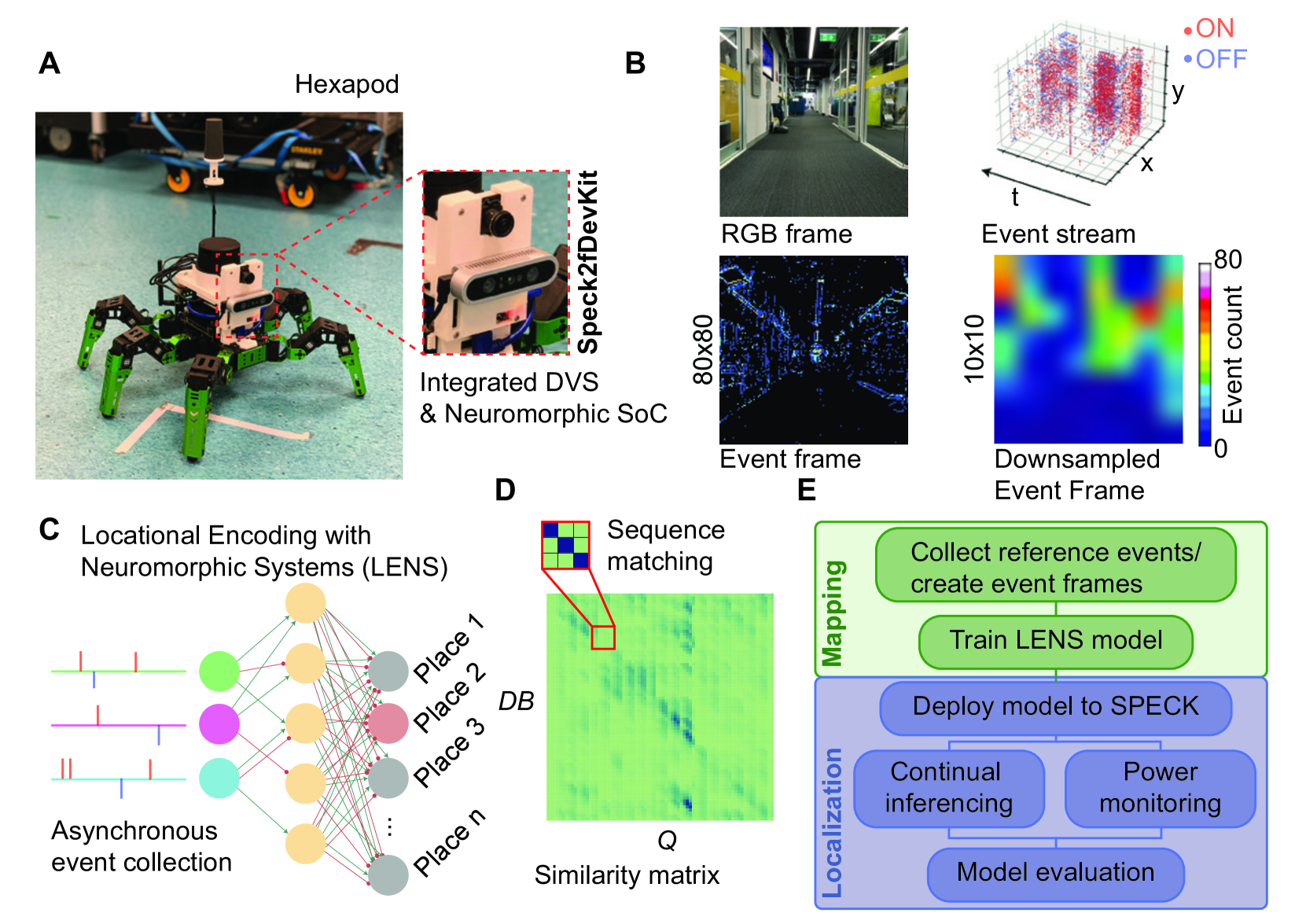
Neuromorphic computing offers a transformative pathway to overcome the computational and energy challenges faced in deploying robotic localization and navigation systems at the edge. Visual place recognition, a critical component for navigation, is often hampered by the high resource demands of conventional systems, making them unsuitable for small-scale robotic platforms which still require to perform complex, long-range tasks. Although neuromorphic approaches offer potential for greater efficiency, real-time edge deployment remains constrained by the complexity and limited scalability of bio-realistic networks. Here, we demonstrate a neuromorphic localization system that performs accurate place recognition in up to 8km of traversal using models as small as 180 KB with 44k parameters, while consuming less than 1% of the energy required by conventional methods. Our Locational Encoding with Neuromorphic Systems (LENS) integrates spiking neural networks, an event-based dynamic vision sensor, and a neuromorphic processor within a single SPECK(TM) chip, enabling real-time, energy-efficient localization on a hexapod robot. LENS represents the first fully neuromorphic localization system capable of large-scale, on-device deployment, setting a new benchmark for energy efficient robotic place recognition.
Read more8/30/2024

0
Neuromorphic force-control in an industrial task: validating energy and latency benefits
Camilo Amaya, Evan Eames, Gintautas Palinauskas, Alexander Perzylo, Yulia Sandamirskaya, Axel von Arnim
As robots become smarter and more ubiquitous, optimizing the power consumption of intelligent compute becomes imperative towards ensuring the sustainability of technological advancements. Neuromorphic computing hardware makes use of biologically inspired neural architectures to achieve energy and latency improvements compared to conventional von Neumann computing architecture. Applying these benefits to robots has been demonstrated in several works in the field of neurorobotics, typically on relatively simple control tasks. Here, we introduce an example of neuromorphic computing applied to the real-world industrial task of object insertion. We trained a spiking neural network (SNN) to perform force-torque feedback control using a reinforcement learning approach in simulation. We then ported the SNN to the Intel neuromorphic research chip Loihi interfaced with a KUKA robotic arm. At inference time we show latency competitive with current CPU/GPU architectures, and one order of magnitude less energy usage in comparison to state-of-the-art low-energy edge-hardware. We offer this example as a proof of concept implementation of a neuromoprhic controller in real-world robotic setting, highlighting the benefits of neuromorphic hardware for the development of intelligent controllers for robots.
Read more9/4/2024

0
Neuromorphic Perception and Navigation for Mobile Robots: A Review
A. Novo, F. Lobon, H. G. De Marina, S. Romero, F. Barranco
With the fast and unstoppable evolution of robotics and artificial intelligence, effective autonomous navigation in real-world scenarios has become one of the most pressing challenges in the literature. However, demanding requirements, such as real-time operation, energy and computational efficiency, robustness, and reliability, make most current solutions unsuitable for real-world challenges. Thus, researchers are forced to seek innovative approaches, such as bio-inspired solutions. Indeed, animals have the intrinsic ability to efficiently perceive, understand, and navigate their unstructured surroundings. To do so, they exploit self-motion cues, proprioception, and visual flow in a cognitive process to map their environment and locate themselves within it. Computational neuroscientists aim to answer ''how'' and ''why'' such cognitive processes occur in the brain, to design novel neuromorphic sensors and methods that imitate biological processing. This survey aims to comprehensively review the application of brain-inspired strategies to autonomous navigation, considering: neuromorphic perception and asynchronous event processing, energy-efficient and adaptive learning, or the imitation of the working principles of brain areas that play a crucial role in navigation such as the hippocampus or the entorhinal cortex.
Read more7/10/2024

0
A Neuromorphic Approach to Obstacle Avoidance in Robot Manipulation
Ahmed Faisal Abdelrahman, Matias Valdenegro-Toro, Maren Bennewitz, Paul G. Ploger
Neuromorphic computing mimics computational principles of the brain in $textit{silico}$ and motivates research into event-based vision and spiking neural networks (SNNs). Event cameras (ECs) exclusively capture local intensity changes and offer superior power consumption, response latencies, and dynamic ranges. SNNs replicate biological neuronal dynamics and have demonstrated potential as alternatives to conventional artificial neural networks (ANNs), such as in reducing energy expenditure and inference time in visual classification. Nevertheless, these novel paradigms remain scarcely explored outside the domain of aerial robots. To investigate the utility of brain-inspired sensing and data processing, we developed a neuromorphic approach to obstacle avoidance on a camera-equipped manipulator. Our approach adapts high-level trajectory plans with reactive maneuvers by processing emulated event data in a convolutional SNN, decoding neural activations into avoidance motions, and adjusting plans using a dynamic motion primitive. We conducted experiments with a Kinova Gen3 arm performing simple reaching tasks that involve obstacles in sets of distinct task scenarios and in comparison to a non-adaptive baseline. Our neuromorphic approach facilitated reliable avoidance of imminent collisions in simulated and real-world experiments, where the baseline consistently failed. Trajectory adaptations had low impacts on safety and predictability criteria. Among the notable SNN properties were the correlation of computations with the magnitude of perceived motions and a robustness to different event emulation methods. Tests with a DAVIS346 EC showed similar performance, validating our experimental event emulation. Our results motivate incorporating SNN learning, utilizing neuromorphic processors, and further exploring the potential of neuromorphic methods.
Read more4/10/2024