Q-Learning to navigate turbulence without a map
2404.17495
0
0
🎲
Abstract
We consider the problem of olfactory searches in a turbulent environment. We focus on agents that respond solely to odor stimuli, with no access to spatial perception nor prior information about the odor location. We ask whether navigation strategies to a target can be learned robustly within a sequential decision making framework. We develop a reinforcement learning algorithm using a small set of interpretable olfactory states and train it with realistic turbulent odor cues. By introducing a temporal memory, we demonstrate that two salient features of odor traces, discretized in few olfactory states, are sufficient to learn navigation in a realistic odor plume. Performance is dictated by the sparse nature of turbulent plumes. An optimal memory exists which ignores blanks within the plume and activates a recovery strategy outside the plume. We obtain the best performance by letting agents learn their recovery strategy and show that it is mostly casting cross wind, similar to behavior observed in flying insects. The optimal strategy is robust to substantial changes in the odor plumes, suggesting minor parameter tuning may be sufficient to adapt to different environments.
Create account to get full access
Overview
- This paper explores the problem of olfactory searches in a turbulent environment.
- The researchers focus on agents that rely solely on odor stimuli, without access to spatial perception or prior information about the odor location.
- They investigate whether navigation strategies to a target can be learned robustly within a sequential decision-making framework.
- The researchers develop a reinforcement learning algorithm that uses a small set of interpretable olfactory states and train it with realistic turbulent odor cues.
Plain English Explanation
The paper examines how animals and robots can navigate and find the source of an odor in a turbulent, unpredictable environment. The researchers look at agents, or simulated creatures, that can only detect the smell and don't have any other information about the environment or the location of the odor source.
The key question is whether these agents can learn effective navigation strategies to reach the target odor source, using a reinforcement learning approach. Reinforcement learning is a type of machine learning where the agent learns by trial and error, getting rewards or punishments for its actions.
The researchers develop a reinforcement learning algorithm that uses a small number of simple olfactory states to represent the agent's perception of the odor. They train this algorithm using realistic simulations of turbulent odor plumes, which are the dispersed trails of odor particles in the air.
The main finding is that just two key features of the odor traces are enough for the agent to learn how to navigate to the source. The agents learn to ignore gaps in the odor plume and to use a "casting" behavior, zigzagging back and forth across the wind direction, to relocate the plume when they lose it. This casting behavior is similar to what has been observed in real-life insects searching for odor sources.
Importantly, the researchers show that this navigation strategy is robust and can adapt to different odor plume environments with only minor adjustments. This suggests the approach could be useful for applications like robots searching for gas leaks or other odor sources in complex, turbulent real-world settings.
Technical Explanation
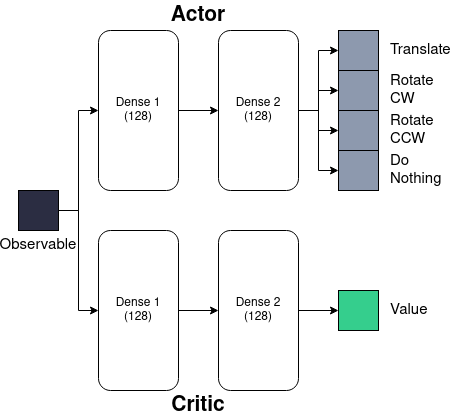
The paper presents a reinforcement learning approach to olfactory search in turbulent environments. The researchers focus on agents that rely solely on odor stimuli, without access to spatial perception or prior information about the odor location. They develop a reinforcement learning algorithm that uses a small set of interpretable olfactory states to represent the agent's perception.
The key elements of the technical approach are:
-
Olfactory State Representation: The agents' perception of the odor plume is discretized into a few interpretable olfactory states, such as "inside plume", "outside plume", and "lost plume".
-
Reinforcement Learning: The agents learn navigation strategies through trial-and-error, receiving rewards for approaching the odor source and penalties for moving away from it.
-
Temporal Memory: By introducing a short-term temporal memory, the researchers show that two salient features of the odor traces - discretized into the few olfactory states - are sufficient for the agents to learn effective navigation.
-
Odor Plume Simulation: The agents are trained and evaluated in realistic simulations of turbulent odor plumes, which are sparse and intermittent in nature.
The key findings are:
- An optimal memory duration exists that allows the agents to ignore gaps in the odor plume and activate a recovery strategy when they lose the plume.
- The agents learn a "casting" behavior, zigzagging across the wind direction, to relocate the plume, similar to what is observed in flying insects.
- The learned navigation strategy is robust to substantial changes in the odor plume, suggesting it could be adapted to different environments with minor parameter tuning.
Critical Analysis
The paper presents a compelling approach to olfactory search in turbulent environments, with several strengths and potential limitations:
Strengths:
- The use of a small set of interpretable olfactory states and temporal memory allows the agents to learn effective navigation strategies with minimal complexity.
- The casting behavior learned by the agents is consistent with observations of real-world insect behavior, suggesting the approach captures essential elements of olfactory search.
- The robustness of the learned strategies to changes in the odor plume environment is an important practical consideration for real-world applications.
Limitations:
- The study is limited to simulation-based experiments, and it would be valuable to validate the approach in physical robotic systems or real-world environments.
- The agents' perception is restricted to olfactory cues, whereas in many real-world scenarios, animals and robots could leverage additional sensory modalities (e.g., visual, auditory) to aid in navigation.
- The paper does not explore the scalability of the approach to more complex environments or larger agent populations, which would be important for real-world deployment.
Overall, the research presented in this paper makes a valuable contribution to the understanding of olfactory-based navigation strategies and their potential for application in robotics and other domains. Future work could build on these insights to develop more robust and adaptable olfactory search algorithms for challenging real-world environments.
Conclusion
This paper investigates the problem of olfactory search in turbulent environments, focusing on agents that rely solely on odor stimuli for navigation. The researchers develop a reinforcement learning algorithm that uses a small set of interpretable olfactory states and temporal memory to learn effective navigation strategies.
The key findings are that two salient features of the odor traces are sufficient for the agents to learn to navigate to the target, and that the learned strategies, which include a "casting" behavior similar to that observed in insects, are robust to changes in the odor plume environment.
These insights have the potential to inform the development of olfactory-based navigation systems for robots and other autonomous agents operating in complex, real-world settings, such as gas leak detection or search and rescue operations. Further research is needed to validate the approach in physical systems and explore its scalability to more challenging scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Emergence of Chemotactic Strategies with Multi-Agent Reinforcement Learning
Samuel Tovey, Christoph Lohrmann, Christian Holm
0
0
Reinforcement learning (RL) is a flexible and efficient method for programming micro-robots in complex environments. Here we investigate whether reinforcement learning can provide insights into biological systems when trained to perform chemotaxis. Namely, whether we can learn about how intelligent agents process given information in order to swim towards a target. We run simulations covering a range of agent shapes, sizes, and swim speeds to determine if the physical constraints on biological swimmers, namely Brownian motion, lead to regions where reinforcement learners' training fails. We find that the RL agents can perform chemotaxis as soon as it is physically possible and, in some cases, even before the active swimming overpowers the stochastic environment. We study the efficiency of the emergent policy and identify convergence in agent size and swim speeds. Finally, we study the strategy adopted by the reinforcement learning algorithm to explain how the agents perform their tasks. To this end, we identify three emerging dominant strategies and several rare approaches taken. These strategies, whilst producing almost identical trajectories in simulation, are distinct and give insight into the possible mechanisms behind which biological agents explore their environment and respond to changing conditions.
4/3/2024
🏅
RUMOR: Reinforcement learning for Understanding a Model of the Real World for Navigation in Dynamic Environments
Diego Martinez-Baselga, Luis Riazuelo, Luis Montano
0
0
Autonomous navigation in dynamic environments is a complex but essential task for autonomous robots, with recent deep reinforcement learning approaches showing promising results. However, the complexity of the real world makes it infeasible to train agents in every possible scenario configuration. Moreover, existing methods typically overlook factors such as robot kinodynamic constraints, or assume perfect knowledge of the environment. In this work, we present RUMOR, a novel planner for differential-drive robots that uses deep reinforcement learning to navigate in highly dynamic environments. Unlike other end-to-end DRL planners, it uses a descriptive robocentric velocity space model to extract the dynamic environment information, enhancing training effectiveness and scenario interpretation. Additionally, we propose an action space that inherently considers robot kinodynamics and train it in a simulator that reproduces the real world problematic aspects, reducing the gap between the reality and simulation. We extensively compare RUMOR with other state-of-the-art approaches, demonstrating a better performance, and provide a detailed analysis of the results. Finally, we validate RUMOR's performance in real-world settings by deploying it on a ground robot. Our experiments, conducted in crowded scenarios and unseen environments, confirm the algorithm's robustness and transferability.
4/26/2024

LiCS: Navigation using Learned-imitation on Cluttered Space
Joshua Julian Damanik, Jae-Won Jung, Chala Adane Deresa, Han-Lim Choi
0
0
In this letter, we propose a robust and fast navigation system in a narrow indoor environment for UGV (Unmanned Ground Vehicle) using 2D LiDAR and odometry. We used behavior cloning with Transformer neural network to learn the optimization-based baseline algorithm. We inject Gaussian noise during expert demonstration to increase the robustness of learned policy. We evaluate the performance of LiCS using both simulation and hardware experiments. It outperforms all other baselines in terms of navigation performance and can maintain its robust performance even on highly cluttered environments. During the hardware experiments, LiCS can maintain safe navigation at maximum speed of $1.5 m/s$.
6/24/2024

New!Time-optimal Flight in Cluttered Environments via Safe Reinforcement Learning
Wei Xiao, Zhaohan Feng, Ziyu Zhou, Jian Sun, Gang Wang, Jie Chen
0
0
This paper addresses the problem of guiding a quadrotor through a predefined sequence of waypoints in cluttered environments, aiming to minimize the flight time while avoiding collisions. Previous approaches either suffer from prolonged computational time caused by solving complex non-convex optimization problems or are limited by the inherent smoothness of polynomial trajectory representations, thereby restricting the flexibility of movement. In this work, we present a safe reinforcement learning approach for autonomous drone racing with time-optimal flight in cluttered environments. The reinforcement learning policy, trained using safety and terminal rewards specifically designed to enforce near time-optimal and collision-free flight, outperforms current state-of-the-art algorithms. Additionally, experimental results demonstrate the efficacy of the proposed approach in achieving both minimum flight time and obstacle avoidance objectives in complex environments, with a commendable $66.7%$ success rate in unseen, challenging settings.
7/1/2024