An Efficient Multi-Robot Arm Coordination Strategy for Pick-and-Place Tasks using Reinforcement Learning

0

Sign in to get full access
Overview
- Efficient coordination strategy for multi-robot arms in pick-and-place tasks
- Uses reinforcement learning to optimize robot movements and avoid collisions
- Focuses on improving task completion time and energy efficiency
Plain English Explanation
This research paper presents an efficient strategy for coordinating the movements of multiple robotic arms to perform pick-and-place tasks. The key idea is to use reinforcement learning, a type of machine learning, to train the robots to optimize their movements and avoid collisions with each other.
The main goal is to improve the time it takes to complete the task as well as the energy efficiency of the robots' actions. This is important in applications like warehouse logistics where fast and efficient robot coordination is crucial.
The researchers use simulations to train the robots and then test the approach on a real-world robotic arm setup. By learning an optimal coordination strategy, the robots can complete the pick-and-place tasks more quickly and with less energy consumption compared to other approaches.
Technical Explanation
The paper proposes a reinforcement learning-based multi-robot coordination strategy for pick-and-place tasks. The approach uses a centralized controller that observes the state of all robots and generates actions to coordinate their movements.
The key components are:
- State Representation: The state includes the positions, velocities, and gripper states of all robots, as well as the locations of the objects to be picked up and placed.
- Action Space: The actions correspond to velocity commands for each robot's joints.
- Reward Function: The reward function encourages fast task completion while minimizing energy consumption and collision risks.
The researchers use proximal policy optimization (PPO), a popular reinforcement learning algorithm, to train the coordination policy. They evaluate the approach in simulation and on a real-world multi-robot arm system, demonstrating improvements in task completion time and energy efficiency compared to baseline methods.
Critical Analysis
The paper provides a comprehensive evaluation of the proposed coordination strategy, including comparisons to alternative approaches and testing on a physical robotic system. However, the authors acknowledge some limitations:
- The approach assumes perfect state information, which may not always be the case in real-world scenarios.
- The training process can be computationally intensive, especially as the number of robots increases.
- The strategy may not generalize well to more complex task scenarios or different robot configurations.
Further research could explore ways to address these limitations, such as incorporating uncertainty handling, decentralized decision-making, or transfer learning techniques. Additionally, the authors could investigate the scalability of their approach to larger teams of robots and more diverse task environments.
Conclusion
This research presents an efficient multi-robot coordination strategy for pick-and-place tasks using reinforcement learning. By optimizing robot movements to minimize task completion time and energy consumption, the approach demonstrates improvements over traditional methods. The findings have potential applications in warehouse logistics, robotic manipulation, and other domains where efficient multi-robot coordination is crucial.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
An Efficient Multi-Robot Arm Coordination Strategy for Pick-and-Place Tasks using Reinforcement Learning
Tizian Jermann, Hendrik Kolvenbach, Fidel Esquivel Estay, Koen Kramer, Marco Hutter
We introduce a novel strategy for multi-robot sorting of waste objects using Reinforcement Learning. Our focus lies on finding optimal picking strategies that facilitate an effective coordination of a multi-robot system, subject to maximizing the waste removal potential. We realize this by formulating the sorting problem as an OpenAI gym environment and training a neural network with a deep reinforcement learning algorithm. The objective function is set up to optimize the picking rate of the robotic system. In simulation, we draw a performance comparison to an intuitive combinatorial game theory-based approach. We show that the trained policies outperform the latter and achieve up to 16% higher picking rates. Finally, the respective algorithms are validated on a hardware setup consisting of a two-robot sorting station able to process incoming waste objects through pick-and-place operations.
Read more9/23/2024
0
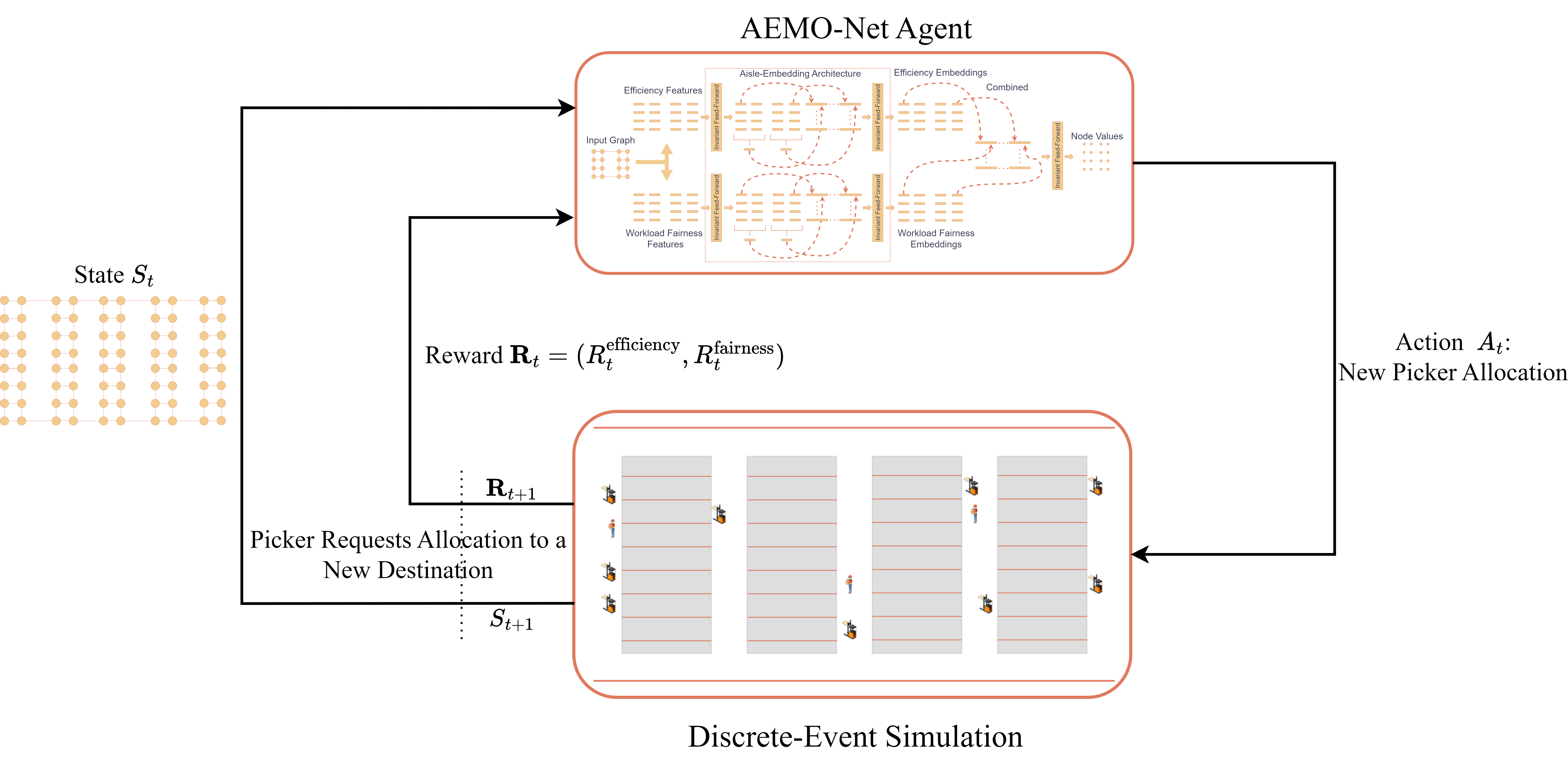
Learning Efficient and Fair Policies for Uncertainty-Aware Collaborative Human-Robot Order Picking
Igor G. Smit, Zaharah Bukhsh, Mykola Pechenizkiy, Kostas Alogariastos, Kasper Hendriks, Yingqian Zhang
In collaborative human-robot order picking systems, human pickers and Autonomous Mobile Robots (AMRs) travel independently through a warehouse and meet at pick locations where pickers load items onto the AMRs. In this paper, we consider an optimization problem in such systems where we allocate pickers to AMRs in a stochastic environment. We propose a novel multi-objective Deep Reinforcement Learning (DRL) approach to learn effective allocation policies to maximize pick efficiency while also aiming to improve workload fairness amongst human pickers. In our approach, we model the warehouse states using a graph, and define a neural network architecture that captures regional information and effectively extracts representations related to efficiency and workload. We develop a discrete-event simulation model, which we use to train and evaluate the proposed DRL approach. In the experiments, we demonstrate that our approach can find non-dominated policy sets that outline good trade-offs between fairness and efficiency objectives. The trained policies outperform the benchmarks in terms of both efficiency and fairness. Moreover, they show good transferability properties when tested on scenarios with different warehouse sizes. The implementation of the simulation model, proposed approach, and experiments are published.
Read more4/15/2024
🏅
0
Scalable Multi-Agent Reinforcement Learning for Warehouse Logistics with Robotic and Human Co-Workers
Aleksandar Krnjaic, Raul D. Steleac, Jonathan D. Thomas, Georgios Papoudakis, Lukas Schafer, Andrew Wing Keung To, Kuan-Ho Lao, Murat Cubuktepe, Matthew Haley, Peter Borsting, Stefano V. Albrecht
We consider a warehouse in which dozens of mobile robots and human pickers work together to collect and deliver items within the warehouse. The fundamental problem we tackle, called the order-picking problem, is how these worker agents must coordinate their movement and actions in the warehouse to maximise performance in this task. Established industry methods using heuristic approaches require large engineering efforts to optimise for innately variable warehouse configurations. In contrast, multi-agent reinforcement learning (MARL) can be flexibly applied to diverse warehouse configurations (e.g. size, layout, number/types of workers, item replenishment frequency), and different types of order-picking paradigms (e.g. Goods-to-Person and Person-to-Goods), as the agents can learn how to cooperate optimally through experience. We develop hierarchical MARL algorithms in which a manager agent assigns goals to worker agents, and the policies of the manager and workers are co-trained toward maximising a global objective (e.g. pick rate). Our hierarchical algorithms achieve significant gains in sample efficiency over baseline MARL algorithms and overall pick rates over multiple established industry heuristics in a diverse set of warehouse configurations and different order-picking paradigms.
Read more9/2/2024

0
Reinforcement Learning to improve delta robot throws for sorting scrap metal
Arthur Louette, Gaspard Lambrechts, Damien Ernst, Eric Pirard, Godefroid Dislaire
This study proposes a novel approach based on reinforcement learning (RL) to enhance the sorting efficiency of scrap metal using delta robots and a Pick-and-Place (PaP) process, widely used in the industry. We use three classical model-free RL algorithms (TD3, SAC and PPO) to reduce the time to sort metal scraps. We learn the release position and speed needed to throw an object in a bin instead of moving to the exact bin location, as with the classical PaP technique. Our contribution is threefold. First, we provide a new simulation environment for learning RL-based Pick-and-Throw (PaT) strategies for parallel grippers. Second, we use RL algorithms for learning this task in this environment resulting in 89% accuracy while speeding up the throughput by 51% in simulation. Third, we evaluate the performances of RL algorithms and compare them to a PaP and a state-of-the-art PaT method both in simulation and reality, learning only from simulation with domain randomisation and without fine tuning in reality to transfer our policies. This work shows the benefits of RL-based PaT compared to PaP or classical optimization PaT techniques used in the industry.
Read more6/24/2024