Scalable Multi-Agent Reinforcement Learning for Warehouse Logistics with Robotic and Human Co-Workers

0
🏅
Sign in to get full access
Overview
- Warehouse with mobile robots and human pickers working together to collect and deliver items
- Fundamental problem is how these worker agents must coordinate their movement and actions to maximize performance
- Established industry methods using heuristics require large engineering efforts to optimize for variable warehouse configurations
- Multi-agent reinforcement learning (MARL) can be flexibly applied to diverse warehouse configurations and order-picking paradigms as agents can learn optimal cooperation through experience
Plain English Explanation
In a warehouse, mobile robots and human workers collaborate to gather and deliver items. The key challenge is how these different agents can coordinate their movements and actions to maximize the overall performance of this order-picking task. Traditional industry methods rely on heuristic-based approaches, which require significant engineering efforts to optimize for the innate variability in warehouse setups.
In contrast, multi-agent reinforcement learning (MARL) offers a more flexible solution. MARL allows the agents to learn how to cooperate optimally through experience, enabling them to adapt to diverse warehouse configurations (e.g., size, layout, number/types of workers, item replenishment frequency) and different order-picking paradigms (e.g., Goods-to-Person, Person-to-Goods). This avoids the need for extensive manual optimization.
The researchers develop hierarchical MARL algorithms in which a manager agent assigns goals to worker agents, and the policies of the manager and workers are co-trained to maximize a global objective (e.g., pick rate). These hierarchical algorithms demonstrate significant gains in sample efficiency over baseline MARL algorithms and outperform established industry heuristics in various warehouse configurations and order-picking paradigms.
Technical Explanation
The paper presents a novel multi-agent reinforcement learning (MARL) approach to address the order-picking problem in warehouse settings. The order-picking problem involves coordinating the movement and actions of mobile robots and human pickers to efficiently collect and deliver items within the warehouse.
The researchers develop a hierarchical MARL algorithm, where a manager agent assigns goals to worker agents (robots and pickers), and the policies of the manager and workers are co-trained to maximize a global objective, such as the overall pick rate. This hierarchical structure aims to improve the sample efficiency and performance of the MARL system compared to baseline MARL algorithms.
The hierarchical MARL algorithms are evaluated across diverse warehouse configurations, including variations in size, layout, number and types of workers, and item replenishment frequency. Additionally, the algorithms are tested on different order-picking paradigms, such as Goods-to-Person and Person-to-Goods. The results show that the hierarchical MARL algorithms significantly outperform established industry heuristics in terms of pick rates and sample efficiency.
Critical Analysis
The paper presents a compelling approach to addressing the order-picking problem in warehouse settings using MARL. The hierarchical structure of the proposed algorithms is a notable innovation, as it allows for better coordination and optimization of the overall system performance.
One potential limitation of the research is the reliance on simulated environments for the experiments. While the authors emphasize the flexibility of their approach to handle diverse warehouse configurations, it would be valuable to see the performance of the algorithms in real-world warehouse settings. Additionally, the paper does not provide a comprehensive analysis of the computational and memory requirements of the hierarchical MARL algorithms, which could be an important consideration for practical deployment.
Furthermore, the paper does not delve into the interpretability and explainability of the learned policies. As MARL systems can be complex and opaque, understanding the decision-making processes of the agents could be beneficial for trust, safety, and further optimization.
Despite these potential areas for improvement, the research represents a significant advancement in the application of MARL to warehouse automation and order-picking tasks. The flexibility and performance gains demonstrated by the hierarchical MARL algorithms suggest promising future applications in the logistics and supply chain industries.
Conclusion
This paper explores the use of multi-agent reinforcement learning (MARL) to address the order-picking problem in warehouse settings, where mobile robots and human pickers must coordinate their actions to efficiently collect and deliver items. The researchers develop a hierarchical MARL approach, where a manager agent assigns goals to worker agents, and the policies of the manager and workers are co-trained to maximize a global objective.
The key contribution of this work is the demonstration of how hierarchical MARL algorithms can outperform established industry heuristics in terms of pick rates and sample efficiency across diverse warehouse configurations and order-picking paradigms. This flexibility and performance improvement offered by MARL-based solutions have the potential to drive significant advancements in warehouse automation and logistics optimization.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
0
Scalable Multi-Agent Reinforcement Learning for Warehouse Logistics with Robotic and Human Co-Workers
Aleksandar Krnjaic, Raul D. Steleac, Jonathan D. Thomas, Georgios Papoudakis, Lukas Schafer, Andrew Wing Keung To, Kuan-Ho Lao, Murat Cubuktepe, Matthew Haley, Peter Borsting, Stefano V. Albrecht
We consider a warehouse in which dozens of mobile robots and human pickers work together to collect and deliver items within the warehouse. The fundamental problem we tackle, called the order-picking problem, is how these worker agents must coordinate their movement and actions in the warehouse to maximise performance in this task. Established industry methods using heuristic approaches require large engineering efforts to optimise for innately variable warehouse configurations. In contrast, multi-agent reinforcement learning (MARL) can be flexibly applied to diverse warehouse configurations (e.g. size, layout, number/types of workers, item replenishment frequency), and different types of order-picking paradigms (e.g. Goods-to-Person and Person-to-Goods), as the agents can learn how to cooperate optimally through experience. We develop hierarchical MARL algorithms in which a manager agent assigns goals to worker agents, and the policies of the manager and workers are co-trained toward maximising a global objective (e.g. pick rate). Our hierarchical algorithms achieve significant gains in sample efficiency over baseline MARL algorithms and overall pick rates over multiple established industry heuristics in a diverse set of warehouse configurations and different order-picking paradigms.
Read more9/2/2024
0
Learning Efficient and Fair Policies for Uncertainty-Aware Collaborative Human-Robot Order Picking
Igor G. Smit, Zaharah Bukhsh, Mykola Pechenizkiy, Kostas Alogariastos, Kasper Hendriks, Yingqian Zhang
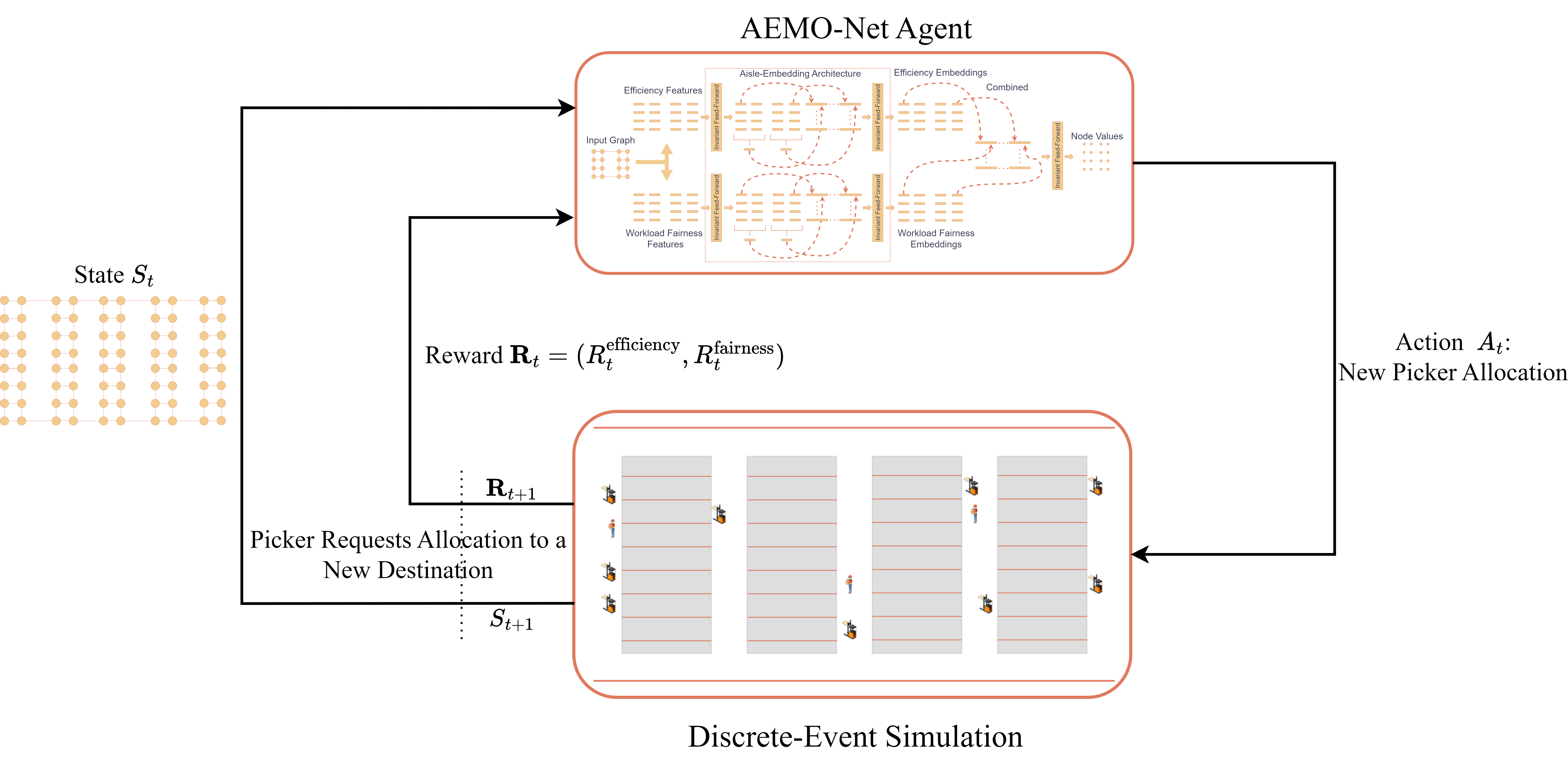
In collaborative human-robot order picking systems, human pickers and Autonomous Mobile Robots (AMRs) travel independently through a warehouse and meet at pick locations where pickers load items onto the AMRs. In this paper, we consider an optimization problem in such systems where we allocate pickers to AMRs in a stochastic environment. We propose a novel multi-objective Deep Reinforcement Learning (DRL) approach to learn effective allocation policies to maximize pick efficiency while also aiming to improve workload fairness amongst human pickers. In our approach, we model the warehouse states using a graph, and define a neural network architecture that captures regional information and effectively extracts representations related to efficiency and workload. We develop a discrete-event simulation model, which we use to train and evaluate the proposed DRL approach. In the experiments, we demonstrate that our approach can find non-dominated policy sets that outline good trade-offs between fairness and efficiency objectives. The trained policies outperform the benchmarks in terms of both efficiency and fairness. Moreover, they show good transferability properties when tested on scenarios with different warehouse sizes. The implementation of the simulation model, proposed approach, and experiments are published.
Read more4/15/2024
➖
0
Optimizing Automated Picking Systems in Warehouse Robots Using Machine Learning
Keqin Li, Jin Wang, Xubo Wu, Xirui Peng, Runmian Chang, Xiaoyu Deng, Yiwen Kang, Yue Yang, Fanghao Ni, Bo Hong
With the rapid growth of global e-commerce, the demand for automation in the logistics industry is increasing. This study focuses on automated picking systems in warehouses, utilizing deep learning and reinforcement learning technologies to enhance picking efficiency and accuracy while reducing system failure rates. Through empirical analysis, we demonstrate the effectiveness of these technologies in improving robot picking performance and adaptability to complex environments. The results show that the integrated machine learning model significantly outperforms traditional methods, effectively addressing the challenges of peak order processing, reducing operational errors, and improving overall logistics efficiency. Additionally, by analyzing environmental factors, this study further optimizes system design to ensure efficient and stable operation under variable conditions. This research not only provides innovative solutions for logistics automation but also offers a theoretical and empirical foundation for future technological development and application.
Read more8/30/2024

0
Multi-Agent Reinforcement Learning for Autonomous Driving: A Survey
Ruiqi Zhang, Jing Hou, Florian Walter, Shangding Gu, Jiayi Guan, Florian Rohrbein, Yali Du, Panpan Cai, Guang Chen, Alois Knoll
Reinforcement Learning (RL) is a potent tool for sequential decision-making and has achieved performance surpassing human capabilities across many challenging real-world tasks. As the extension of RL in the multi-agent system domain, multi-agent RL (MARL) not only need to learn the control policy but also requires consideration regarding interactions with all other agents in the environment, mutual influences among different system components, and the distribution of computational resources. This augments the complexity of algorithmic design and poses higher requirements on computational resources. Simultaneously, simulators are crucial to obtain realistic data, which is the fundamentals of RL. In this paper, we first propose a series of metrics of simulators and summarize the features of existing benchmarks. Second, to ease comprehension, we recall the foundational knowledge and then synthesize the recently advanced studies of MARL-related autonomous driving and intelligent transportation systems. Specifically, we examine their environmental modeling, state representation, perception units, and algorithm design. Conclusively, we discuss open challenges as well as prospects and opportunities. We hope this paper can help the researchers integrate MARL technologies and trigger more insightful ideas toward the intelligent and autonomous driving.
Read more8/20/2024