Efficient Reinforcement Learning of Task Planners for Robotic Palletization through Iterative Action Masking Learning
2404.04772
0
0

Abstract
The development of robotic systems for palletization in logistics scenarios is of paramount importance, addressing critical efficiency and precision demands in supply chain management. This paper investigates the application of Reinforcement Learning (RL) in enhancing task planning for such robotic systems. Confronted with the substantial challenge of a vast action space, which is a significant impediment to efficiently apply out-of-the-shelf RL methods, our study introduces a novel method of utilizing supervised learning to iteratively prune and manage the action space effectively. By reducing the complexity of the action space, our approach not only accelerates the learning phase but also ensures the effectiveness and reliability of the task planning in robotic palletization. The experimental results underscore the efficacy of this method, highlighting its potential in improving the performance of RL applications in complex and high-dimensional environments like logistics palletization.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- Efficient reinforcement learning of robotic palletization task planners through iterative action masking learning
- Proposes a novel approach to improve the sample efficiency of reinforcement learning for complex robotic tasks
- Focuses on the challenging problem of robotic palletization, which involves efficiently stacking objects on a pallet
Plain English Explanation
This research paper presents a method for training robotic systems to efficiently stack objects on a pallet, a task known as robotic palletization. The key challenge is that robotic palletization requires complex decision-making and planning, which can be difficult to learn through traditional reinforcement learning approaches.
The researchers introduce a novel technique called "iterative action masking learning" that improves the sample efficiency of reinforcement learning for this task. The core idea is to gradually narrow down the robot's available actions over the course of training, starting with a broad set of possible actions and progressively focusing on the most relevant ones.
This approach helps the robot learn the task more quickly and effectively, as it doesn't have to explore as many irrelevant actions. By gradually constraining the action space, the robot can concentrate on learning the most important skills needed for successful palletization.
The researchers' previous work on model-based reinforcement learning and active exploration provided a foundation for this new technique. The authors' work on programmatic imitation learning and learning effective actions in robotics also informed the development of this iterative action masking approach.
Overall, this research represents an important advancement in improving the efficiency and performance of reinforcement learning for complex robotic tasks like palletization, with potential applications in logistics, manufacturing, and other domains.
Technical Explanation
The paper introduces a novel reinforcement learning algorithm called "Iterative Action Masking Learning" (IAML) that is designed to improve sample efficiency for robotic palletization tasks. The key idea is to gradually narrow down the robot's action space during training, starting with a broad set of possible actions and progressively focusing on the most relevant ones.
The IAML algorithm works as follows:
- Initial Exploration: The robot is given a broad action space and allowed to explore the environment to gather initial experience.
- Action Masking: After a certain number of training steps, the algorithm identifies the most relevant actions based on the robot's performance and "masks" (i.e., disables) the less relevant actions.
- Iterative Refinement: The process of action masking is repeated over multiple iterations, further narrowing the action space as the robot learns the task.
This iterative action masking approach helps the robot concentrate on the most important skills needed for successful palletization, rather than wasting time exploring irrelevant actions. The researchers show that IAML outperforms standard reinforcement learning algorithms in terms of sample efficiency and task performance on a simulated robotic palletization environment.
The paper also includes experiments that investigate the impact of different hyperparameters, such as the number of actions to mask and the frequency of masking updates, on the algorithm's performance. Additionally, the researchers analyze the learned action masks to gain insights into the key skills and decision-making processes required for effective robotic palletization.
Critical Analysis
The researchers have made a valuable contribution to the field of reinforcement learning for complex robotic tasks. The iterative action masking approach is a promising technique that can potentially improve the sample efficiency and performance of reinforcement learning algorithms in a wide range of applications, beyond just robotic palletization.
One potential limitation of the research is that it is evaluated solely on a simulated environment, and it's unclear how well the IAML algorithm would transfer to real-world robotic systems. The researchers acknowledge this and suggest that future work should focus on validating the approach on physical robot platforms.
Additionally, the paper does not provide a detailed analysis of the computational complexity or training time of the IAML algorithm compared to other reinforcement learning methods. This information would be useful for understanding the practical implications and deployment considerations of the proposed technique.
Another area for further research could be exploring the integration of future predictive models to guide the action masking process, potentially leading to even more efficient and robust learning.
Overall, this research represents an important step forward in the field of reinforcement learning for complex robotic tasks, and the iterative action masking approach deserves further investigation and validation in real-world settings.
Conclusion
The paper presents a novel reinforcement learning algorithm called "Iterative Action Masking Learning" (IAML) that addresses the challenge of efficient robotic palletization. By gradually narrowing the robot's action space during training, IAML helps the system focus on the most relevant skills and actions, leading to improved sample efficiency and task performance.
This work builds on the researchers' previous contributions to model-based reinforcement learning, active exploration, and learning effective actions in robotics. The iterative action masking technique has the potential to enhance the performance of reinforcement learning algorithms in a wide range of complex robotic applications, with implications for logistics, manufacturing, and beyond.
While the results are promising, further validation on physical robot platforms and investigation of the algorithm's computational complexity are needed to fully assess the practical implications of this research. Nonetheless, the IAML approach represents an important step forward in the field of reinforcement learning for robotics, and the insights gained from this work can inspire future advancements in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Learning Efficient and Fair Policies for Uncertainty-Aware Collaborative Human-Robot Order Picking
Igor G. Smit, Zaharah Bukhsh, Mykola Pechenizkiy, Kostas Alogariastos, Kasper Hendriks, Yingqian Zhang
0
0
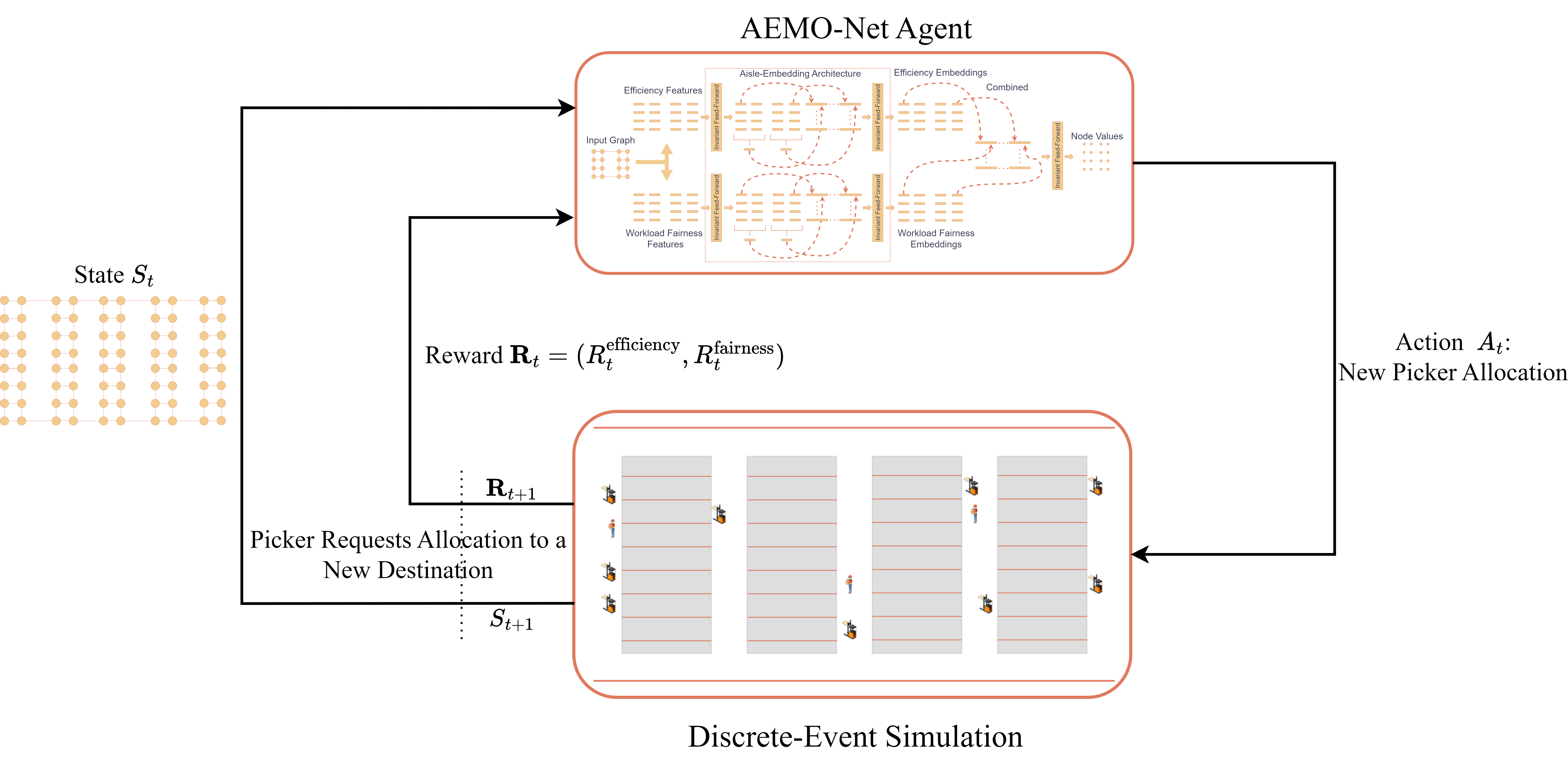
In collaborative human-robot order picking systems, human pickers and Autonomous Mobile Robots (AMRs) travel independently through a warehouse and meet at pick locations where pickers load items onto the AMRs. In this paper, we consider an optimization problem in such systems where we allocate pickers to AMRs in a stochastic environment. We propose a novel multi-objective Deep Reinforcement Learning (DRL) approach to learn effective allocation policies to maximize pick efficiency while also aiming to improve workload fairness amongst human pickers. In our approach, we model the warehouse states using a graph, and define a neural network architecture that captures regional information and effectively extracts representations related to efficiency and workload. We develop a discrete-event simulation model, which we use to train and evaluate the proposed DRL approach. In the experiments, we demonstrate that our approach can find non-dominated policy sets that outline good trade-offs between fairness and efficiency objectives. The trained policies outperform the benchmarks in terms of both efficiency and fairness. Moreover, they show good transferability properties when tested on scenarios with different warehouse sizes. The implementation of the simulation model, proposed approach, and experiments are published.
4/15/2024
🏅
Reducing Risk for Assistive Reinforcement Learning Policies with Diffusion Models
Andrii Tytarenko
0
0
Care-giving and assistive robotics, driven by advancements in AI, offer promising solutions to meet the growing demand for care, particularly in the context of increasing numbers of individuals requiring assistance. This creates a pressing need for efficient and safe assistive devices, particularly in light of heightened demand due to war-related injuries. While cost has been a barrier to accessibility, technological progress is able to democratize these solutions. Safety remains a paramount concern, especially given the intricate interactions between assistive robots and humans. This study explores the application of reinforcement learning (RL) and imitation learning, in improving policy design for assistive robots. The proposed approach makes the risky policies safer without additional environmental interactions. Through experimentation using simulated environments, the enhancement of the conventional RL approaches in tasks related to assistive robotics is demonstrated.
5/14/2024
On the Role of the Action Space in Robot Manipulation Learning and Sim-to-Real Transfer
Elie Aljalbout, Felix Frank, Maximilian Karl, Patrick van der Smagt
0
0
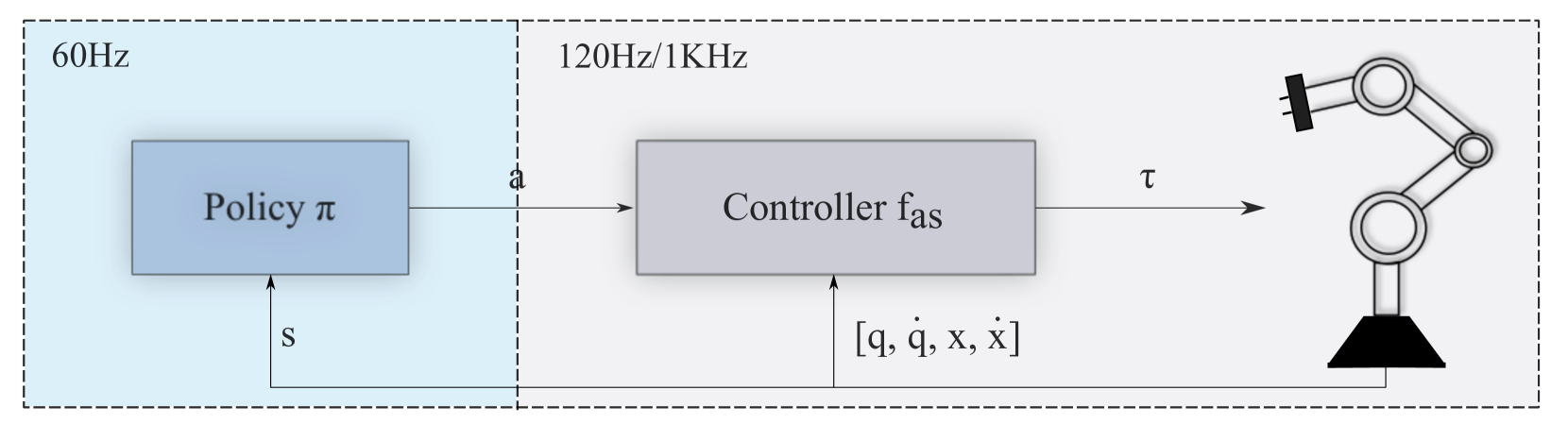
We study the choice of action space in robot manipulation learning and sim-to-real transfer. We define metrics that assess the performance, and examine the emerging properties in the different action spaces. We train over 250 reinforcement learning~(RL) agents in simulated reaching and pushing tasks, using 13 different control spaces. The choice of spaces spans combinations of common action space design characteristics. We evaluate the training performance in simulation and the transfer to a real-world environment. We identify good and bad characteristics of robotic action spaces and make recommendations for future designs. Our findings have important implications for the design of RL algorithms for robot manipulation tasks, and highlight the need for careful consideration of action spaces when training and transferring RL agents for real-world robotics.
5/1/2024

Active Exploration in Bayesian Model-based Reinforcement Learning for Robot Manipulation
Carlos Plou, Ana C. Murillo, Ruben Martinez-Cantin
0
0
Efficiently tackling multiple tasks within complex environment, such as those found in robot manipulation, remains an ongoing challenge in robotics and an opportunity for data-driven solutions, such as reinforcement learning (RL). Model-based RL, by building a dynamic model of the robot, enables data reuse and transfer learning between tasks with the same robot and similar environment. Furthermore, data gathering in robotics is expensive and we must rely on data efficient approaches such as model-based RL, where policy learning is mostly conducted on cheaper simulations based on the learned model. Therefore, the quality of the model is fundamental for the performance of the posterior tasks. In this work, we focus on improving the quality of the model and maintaining the data efficiency by performing active learning of the dynamic model during a preliminary exploration phase based on maximize information gathering. We employ Bayesian neural network models to represent, in a probabilistic way, both the belief and information encoded in the dynamic model during exploration. With our presented strategies we manage to actively estimate the novelty of each transition, using this as the exploration reward. In this work, we compare several Bayesian inference methods for neural networks, some of which have never been used in a robotics context, and evaluate them in a realistic robot manipulation setup. Our experiments show the advantages of our Bayesian model-based RL approach, with similar quality in the results than relevant alternatives with much lower requirements regarding robot execution steps. Unlike related previous studies that focused the validation solely on toy problems, our research takes a step towards more realistic setups, tackling robotic arm end-tasks.
4/3/2024