Unsupervised Learning of Effective Actions in Robotics

0

Sign in to get full access
Overview
- This paper presents a novel approach for enabling robots to learn effective actions in an unsupervised manner.
- The proposed method allows robots to discover and refine their own actions without relying on human demonstrations or rewards.
- The key idea is to leverage intrinsic motivations, such as curiosity and competence, to guide the robot's exploration and learning process.
Plain English Explanation
Robots today are often trained using supervised learning, where humans provide examples of correct actions. However, this can be time-consuming and limit the robot's ability to discover novel solutions. This paper introduces a new way for robots to learn effective actions on their own, without human guidance.
The core insight is to equip the robot with an internal sense of "curiosity" and "competence" that motivates it to explore its environment and try out new actions. Rather than being told what to do, the robot experiments with different movements and observes the outcomes. It then refines its actions to maximize desirable effects, such as reaching a goal or maintaining balance, without any external rewards.
By tapping into these intrinsic motivations, the robot can autonomously develop a repertoire of useful skills that allow it to navigate and interact with the world effectively. This is analogous to how human children learn - they explore their surroundings driven by an innate desire to understand and master their environment.
The researchers demonstrate this approach in simulated robotic tasks, showing that the robots are able to learn complex behaviors from scratch without supervision. This could pave the way for more adaptable and capable robots that can tackle a wider range of real-world challenges.
Technical Explanation
The paper introduces a framework for unsupervised action learning in robots, centered around two key components: empowerment maximization and competence-based intrinsic motivation.
Empowerment maximization encourages the robot to discover actions that give it more control over its future states. This is quantified by measuring the mutual information between the robot's current state and the set of states it can transition to through its actions. The robot aims to choose actions that maximize this information-theoretic measure of control.
Competence-based intrinsic motivation provides an internal reward signal that drives the robot to improve its ability to achieve desired effects in the environment. This is implemented by training a neural network to predict the outcome of the robot's actions, and then rewarding the robot when it reduces the error between predicted and actual outcomes.
The researchers evaluate this approach in simulated robotic environments, including a 2D navigation task and a 3D balancing task. They show that the robots are able to learn effective locomotion and balancing behaviors without any external rewards or demonstrations, solely by pursuing these intrinsic motivations.
Critical Analysis
The paper presents a compelling framework for enabling robots to autonomously discover and refine useful actions through intrinsic motivation. By focusing on empowerment and competence, the approach allows the robots to develop rich behavioral repertoires without human intervention.
One potential limitation is the reliance on accurate models of the robot's dynamics and the environment. In real-world scenarios, these models may be imperfect or change over time, which could impact the robot's ability to accurately predict action outcomes and maximize its control.
Additionally, the paper does not address how the method would scale to more complex, multi-task settings. While the simulated experiments demonstrate the effectiveness of the approach in specific scenarios, it remains to be seen how well it would generalize to open-ended, real-world environments with diverse challenges.
Further research could explore ways to make the learning process more robust to model uncertainties, as well as investigate strategies for composing and reusing learned skills to tackle more general problems. Incorporating social learning mechanisms, where robots can learn from each other or from limited human guidance, could also be a fruitful direction.
Conclusion
This paper presents a novel approach for enabling robots to learn effective actions in an unsupervised manner, leveraging intrinsic motivations such as empowerment and competence. By allowing robots to explore and refine their own behaviors, the method holds promise for developing more adaptable and capable robotic systems that can tackle a wide range of real-world challenges. While the current evaluation is limited to simulated environments, the underlying principles could have broader implications for the field of autonomous learning and decision-making.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Unsupervised Learning of Effective Actions in Robotics
Marko Zaric, Jakob Hollenstein, Justus Piater, Erwan Renaudo
Learning actions that are relevant to decision-making and can be executed effectively is a key problem in autonomous robotics. Current state-of-the-art action representations in robotics lack proper effect-driven learning of the robot's actions. Although successful in solving manipulation tasks, deep learning methods also lack this ability, in addition to their high cost in terms of memory or training data. In this paper, we propose an unsupervised algorithm to discretize a continuous motion space and generate action prototypes, each producing different effects in the environment. After an exploration phase, the algorithm automatically builds a representation of the effects and groups motions into action prototypes, where motions more likely to produce an effect are represented more than those that lead to negligible changes. We evaluate our method on a simulated stair-climbing reinforcement learning task, and the preliminary results show that our effect driven discretization outperforms uniformly and randomly sampled discretizations in convergence speed and maximum reward.
Read more4/4/2024
📈
0
Learning to Represent Surroundings, Anticipate Motion and Take Informed Actions in Unstructured Environments
Weiming Zhi
Contemporary robots have become exceptionally skilled at achieving specific tasks in structured environments. However, they often fail when faced with the limitless permutations of real-world unstructured environments. This motivates robotics methods which learn from experience, rather than follow a pre-defined set of rules. In this thesis, we present a range of learning-based methods aimed at enabling robots, operating in dynamic and unstructured environments, to better understand their surroundings, anticipate the actions of others, and take informed actions accordingly.
Read more7/16/2024
0
Agentic Skill Discovery
Xufeng Zhao, Cornelius Weber, Stefan Wermter
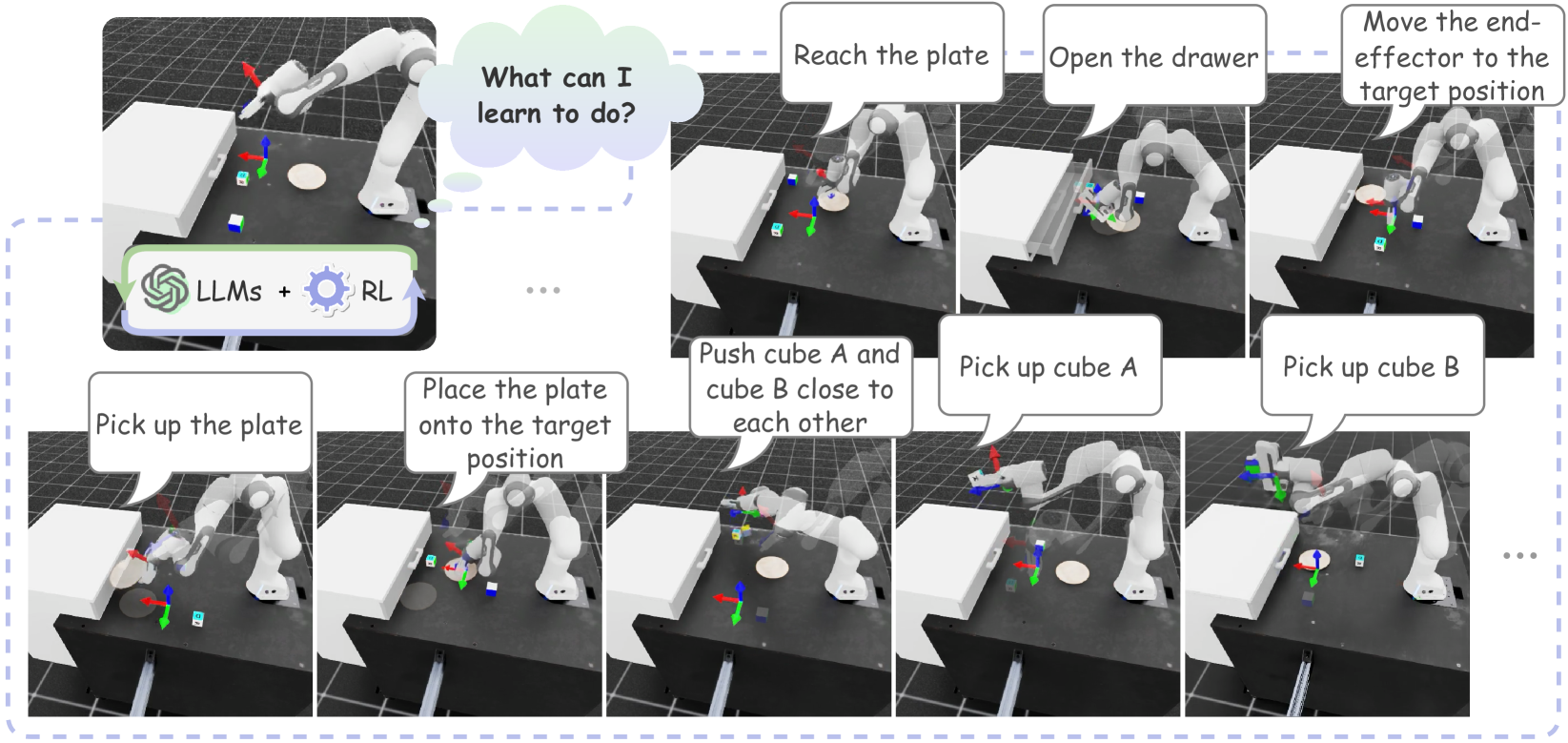
Language-conditioned robotic skills make it possible to apply the high-level reasoning of Large Language Models (LLMs) to low-level robotic control. A remaining challenge is to acquire a diverse set of fundamental skills. Existing approaches either manually decompose a complex task into atomic robotic actions in a top-down fashion, or bootstrap as many combinations as possible in a bottom-up fashion to cover a wider range of task possibilities. These decompositions or combinations, however, require an initial skill library. For example, a ``grasping'' capability can never emerge from a skill library containing only diverse ``pushing'' skills. Existing skill discovery techniques with reinforcement learning acquire skills by an exhaustive exploration but often yield non-meaningful behaviors. In this study, we introduce a novel framework for skill discovery that is entirely driven by LLMs. The framework begins with an LLM generating task proposals based on the provided scene description and the robot's configurations, aiming to incrementally acquire new skills upon task completion. For each proposed task, a series of reinforcement learning processes are initiated, utilizing reward and success determination functions sampled by the LLM to develop the corresponding policy. The reliability and trustworthiness of learned behaviors are further ensured by an independent vision-language model. We show that starting with zero skill, the skill library emerges and expands to more and more meaningful and reliable skills, enabling the robot to efficiently further propose and complete advanced tasks. Project page: url{https://agentic-skill-discovery.github.io}.
Read more8/19/2024

0
Unsupervised, Bottom-up Category Discovery for Symbol Grounding with a Curious Robot
Catherine Henry, Casey Kennington
Towards addressing the Symbol Grounding Problem and motivated by early childhood language development, we leverage a robot which has been equipped with an approximate model of curiosity with particular focus on bottom-up building of unsupervised categories grounded in the physical world. That is, rather than starting with a top-down symbol (e.g., a word referring to an object) and providing meaning through the application of predetermined samples, the robot autonomously and gradually breaks up its exploration space into a series of increasingly specific unlabeled categories at which point an external expert may optionally provide a symbol association. We extend prior work by using a robot that can observe the visual world, introducing a higher dimensional sensory space, and using a more generalizable method of category building. Our experiments show that the robot learns categories based on actions and what it visually observes, and that those categories can be symbolically grounded into.https://info.arxiv.org/help/prep#comments
Read more4/5/2024