Embedded Image-to-Image Translation for Efficient Sim-to-Real Transfer in Learning-based Robot-Assisted Soft Manipulation

0
Sign in to get full access
Overview
- This paper proposes an "Embedded Image-to-Image Translation" approach for efficient sim-to-real transfer in learning-based robot-assisted soft manipulation.
- The key idea is to use a neural network to translate simulation images to realistic images, allowing a robot trained in simulation to better transfer its skills to the real world.
- The authors demonstrate the effectiveness of their approach through experiments on a soft object manipulation task.
Plain English Explanation
The researchers have developed a new technique to help robots learn skills in simulated environments and then apply those skills in the real world. Sim-to-real transfer is a common challenge in robotics - it's hard to get a robot trained in simulation to work well in the real world.
The core of their approach is a neural network that can translate simulation images to look more like real-world images. This helps the robot trained in simulation see the world more like it would in the real environment. By learning on this "translated" simulation data, the robot can develop skills that transfer better when deployed.
The researchers tested this on a soft object manipulation task, where the robot had to interact with deformable objects. This is a challenging scenario, as the simulation may not perfectly capture the real-world physics. But by using their image translation approach, the robot was able to transfer its simulation-trained skills to the real world more effectively.
Technical Explanation
The authors propose an "Embedded Image-to-Image Translation" (EITI) approach for efficient sim-to-real transfer in learning-based robot-assisted soft manipulation. The key idea is to train a neural network to translate simulation images to look more like real-world images, allowing a robot trained in simulation to better apply its skills in the real environment.
The EITI model is trained in an end-to-end fashion to translate simulation images to their corresponding real images. This "translated" simulation data is then used to train the robot's policy network for the soft manipulation task. By seeing a more realistic view of the world during training, the robot is able to learn skills that transfer better to real-world deployment.
The authors evaluate their approach on a soft object manipulation task, where a robot must interact with deformable objects. They show that the EITI-based sim-to-real transfer outperforms alternative techniques, including contrastive imitation learning and a surgical robot transformer approach.
Critical Analysis
The researchers acknowledge several limitations and areas for future work. First, the EITI model was trained on a relatively small dataset of simulation-real image pairs. Expanding the dataset size and diversity could improve the translation capability.
Additionally, the experiments were conducted on a specific soft object manipulation task. Further research is needed to evaluate the generalizability of the EITI approach to other robotic manipulation scenarios, especially those with more complex dynamics.
The authors also note that their current implementation relies on access to paired simulation-real data for training the translation model. Developing unsupervised or self-supervised techniques to learn the translation without requiring such paired data could make the approach more widely applicable.
Overall, the EITI framework represents a promising direction for addressing the sim-to-real gap in learning-based robot manipulation. However, continued research is needed to expand the capabilities and broaden the applicability of this technique.
Conclusion
This paper presents an "Embedded Image-to-Image Translation" approach to enable more efficient sim-to-real transfer in learning-based robot-assisted soft manipulation. By training a neural network to translate simulation images to look more realistic, the robot can develop skills in simulation that transfer better to the real world.
The authors demonstrate the effectiveness of their EITI framework on a soft object manipulation task, showing improved performance compared to alternative techniques. While there are still limitations to address, this work represents an important step towards bridging the gap between simulation and reality in robotic learning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Embedded Image-to-Image Translation for Efficient Sim-to-Real Transfer in Learning-based Robot-Assisted Soft Manipulation
Jacinto Colan, Keisuke Sugita, Ana Davila, Yutaro Yamada, Yasuhisa Hasegawa
Recent advances in robotic learning in simulation have shown impressive results in accelerating learning complex manipulation skills. However, the sim-to-real gap, caused by discrepancies between simulation and reality, poses significant challenges for the effective deployment of autonomous surgical systems. We propose a novel approach utilizing image translation models to mitigate domain mismatches and facilitate efficient robot skill learning in a simulated environment. Our method involves the use of contrastive unpaired Image-to-image translation, allowing for the acquisition of embedded representations from these transformed images. Subsequently, these embeddings are used to improve the efficiency of training surgical manipulation models. We conducted experiments to evaluate the performance of our approach, demonstrating that it significantly enhances task success rates and reduces the steps required for task completion compared to traditional methods. The results indicate that our proposed system effectively bridges the sim-to-real gap, providing a robust framework for advancing the autonomy of surgical robots in minimally invasive procedures.
Read more9/17/2024
🔄
0
Sim-To-Real Transfer for Visual Reinforcement Learning of Deformable Object Manipulation for Robot-Assisted Surgery
Paul Maria Scheikl, Eleonora Tagliabue, Bal'azs Gyenes, Martin Wagner, Diego Dall'Alba, Paolo Fiorini, Franziska Mathis-Ullrich
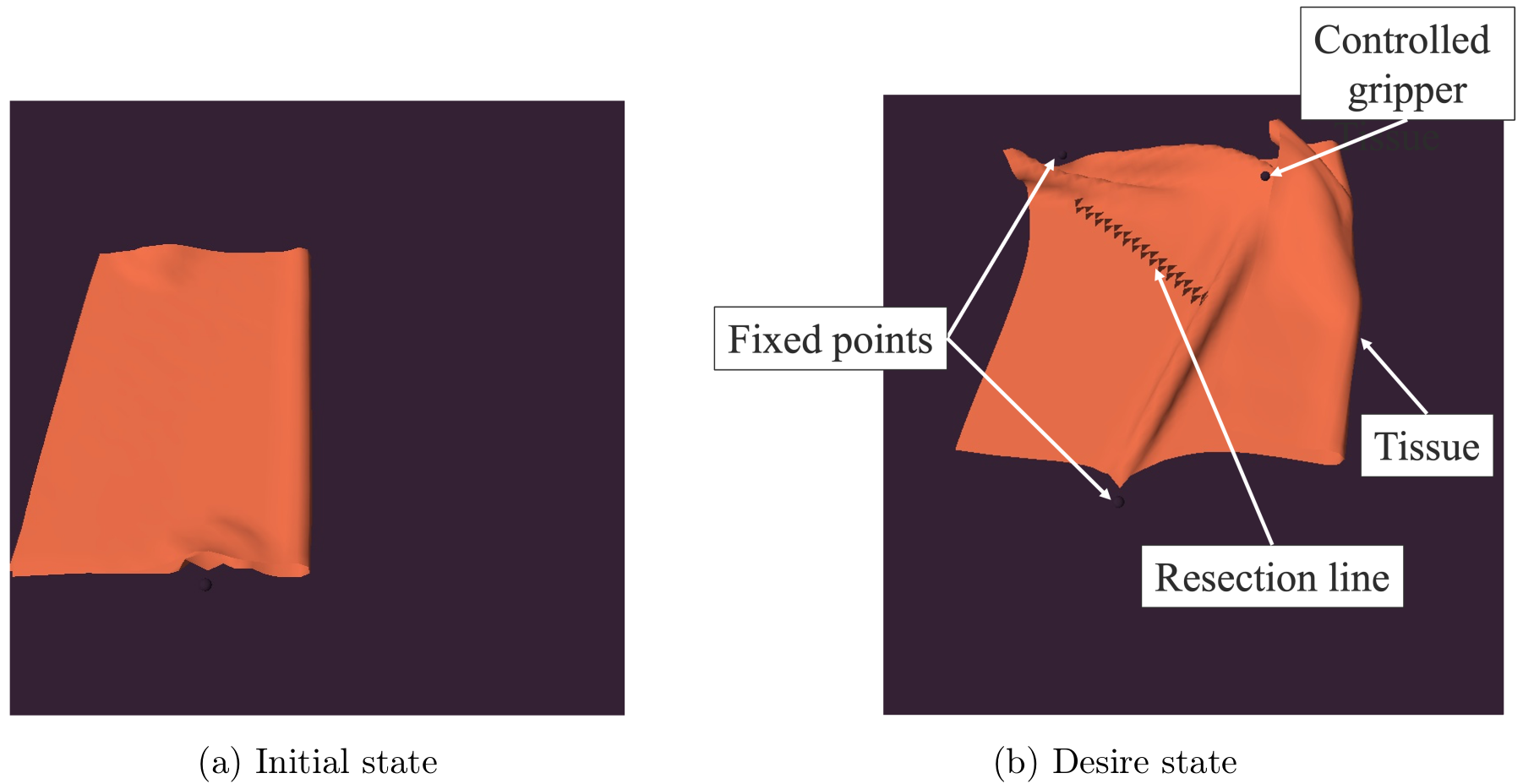
Automation holds the potential to assist surgeons in robotic interventions, shifting their mental work load from visuomotor control to high level decision making. Reinforcement learning has shown promising results in learning complex visuomotor policies, especially in simulation environments where many samples can be collected at low cost. A core challenge is learning policies in simulation that can be deployed in the real world, thereby overcoming the sim-to-real gap. In this work, we bridge the visual sim-to-real gap with an image-based reinforcement learning pipeline based on pixel-level domain adaptation and demonstrate its effectiveness on an image-based task in deformable object manipulation. We choose a tissue retraction task because of its importance in clinical reality of precise cancer surgery. After training in simulation on domain-translated images, our policy requires no retraining to perform tissue retraction with a 50% success rate on the real robotic system using raw RGB images. Furthermore, our sim-to-real transfer method makes no assumptions on the task itself and requires no paired images. This work introduces the first successful application of visual sim-to-real transfer for robotic manipulation of deformable objects in the surgical field, which represents a notable step towards the clinical translation of cognitive surgical robotics.
Read more6/11/2024
0
Natural Language Can Help Bridge the Sim2Real Gap
Albert Yu, Adeline Foote, Raymond Mooney, Roberto Mart'in-Mart'in
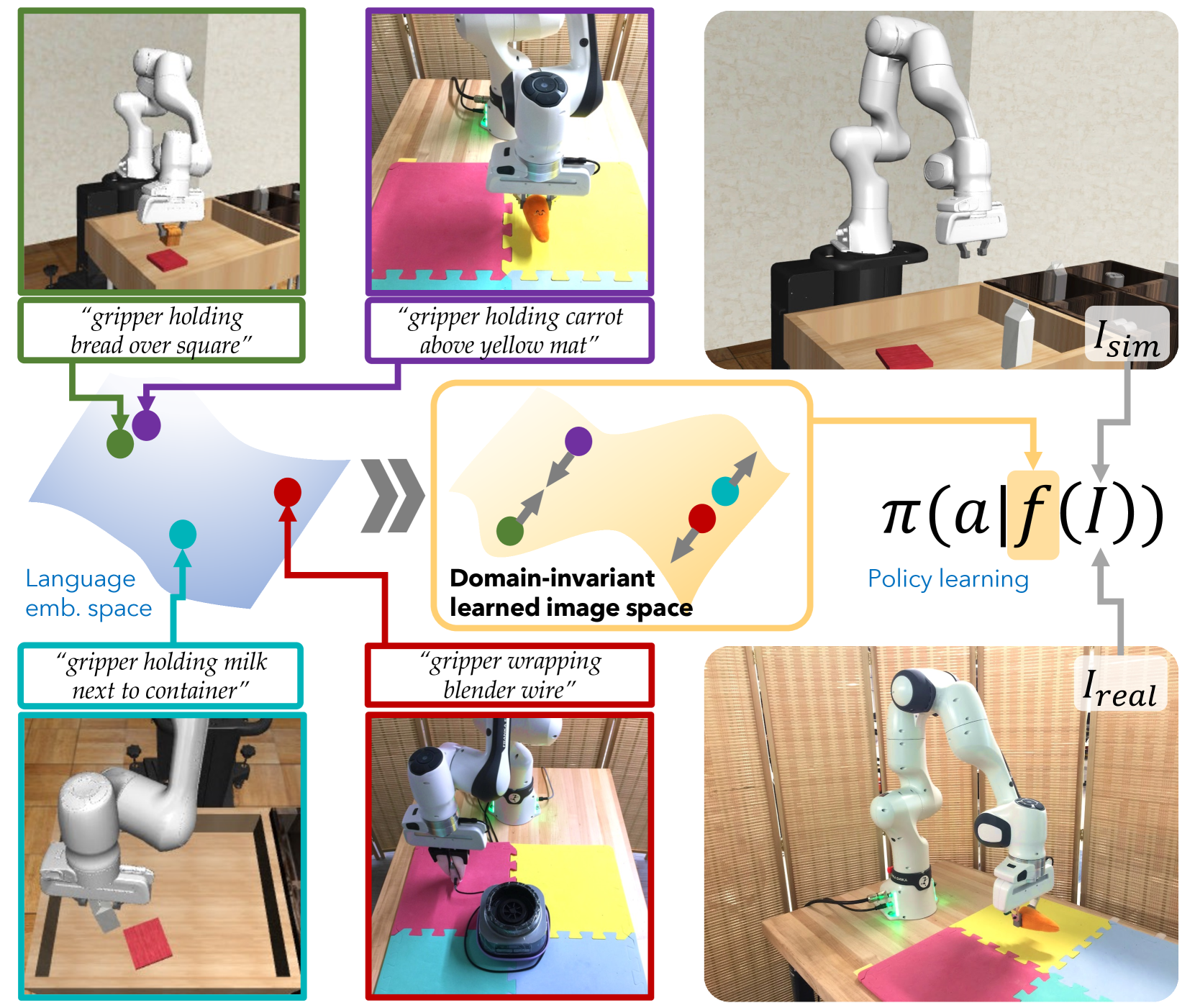
The main challenge in learning image-conditioned robotic policies is acquiring a visual representation conducive to low-level control. Due to the high dimensionality of the image space, learning a good visual representation requires a considerable amount of visual data. However, when learning in the real world, data is expensive. Sim2Real is a promising paradigm for overcoming data scarcity in the real-world target domain by using a simulator to collect large amounts of cheap data closely related to the target task. However, it is difficult to transfer an image-conditioned policy from sim to real when the domains are very visually dissimilar. To bridge the sim2real visual gap, we propose using natural language descriptions of images as a unifying signal across domains that captures the underlying task-relevant semantics. Our key insight is that if two image observations from different domains are labeled with similar language, the policy should predict similar action distributions for both images. We demonstrate that training the image encoder to predict the language description or the distance between descriptions of a sim or real image serves as a useful, data-efficient pretraining step that helps learn a domain-invariant image representation. We can then use this image encoder as the backbone of an IL policy trained simultaneously on a large amount of simulated and a handful of real demonstrations. Our approach outperforms widely used prior sim2real methods and strong vision-language pretraining baselines like CLIP and R3M by 25 to 40%.
Read more5/17/2024

0
Contrastive Imitation Learning for Language-guided Multi-Task Robotic Manipulation
Teli Ma, Jiaming Zhou, Zifan Wang, Ronghe Qiu, Junwei Liang
Developing robots capable of executing various manipulation tasks, guided by natural language instructions and visual observations of intricate real-world environments, remains a significant challenge in robotics. Such robot agents need to understand linguistic commands and distinguish between the requirements of different tasks. In this work, we present Sigma-Agent, an end-to-end imitation learning agent for multi-task robotic manipulation. Sigma-Agent incorporates contrastive Imitation Learning (contrastive IL) modules to strengthen vision-language and current-future representations. An effective and efficient multi-view querying Transformer (MVQ-Former) for aggregating representative semantic information is introduced. Sigma-Agent shows substantial improvement over state-of-the-art methods under diverse settings in 18 RLBench tasks, surpassing RVT by an average of 5.2% and 5.9% in 10 and 100 demonstration training, respectively. Sigma-Agent also achieves 62% success rate with a single policy in 5 real-world manipulation tasks. The code will be released upon acceptance.
Read more6/17/2024