Empowering Embodied Manipulation: A Bimanual-Mobile Robot Manipulation Dataset for Household Tasks

0

Sign in to get full access
Overview
- This paper presents a bimanual-mobile robot manipulation dataset for household tasks, called "Empowering Embodied Manipulation".
- The dataset aims to enable research on robust and versatile robot manipulation capabilities for household environments.
- The dataset includes diverse household objects, tasks, and robot platforms, as well as multi-modal sensor data.
- The authors propose several benchmark tasks and evaluation metrics to assess the performance of robotic manipulation systems.
Plain English Explanation
The researchers have created a new dataset to help robots become better at performing household chores and tasks. Robots often struggle with the wide variety of objects, tools, and environments found in a typical home. This dataset aims to address that by providing a large and diverse collection of data for robots to learn from.
The dataset includes information on many different household items, like cups, plates, and utensils, as well as the various ways a robot can interact with them, such as picking them up, moving them around, and using them for tasks like cooking or cleaning. It also includes data from different types of robot platforms, so the research can be applied to a range of robotic systems.
By having access to this comprehensive dataset, researchers can develop more capable and versatile robot manipulation algorithms. The authors have also suggested several benchmark tasks and evaluation measures to help assess how well the robots are performing these household activities. This should accelerate progress in making robots that can seamlessly assist people in their homes.
Technical Explanation
The paper introduces the "Empowering Embodied Manipulation" dataset, which is designed to support research on robust and versatile robot manipulation capabilities for household environments. The dataset includes a wide variety of household objects, tasks, and robot platforms, as well as multi-modal sensor data to enable the development of visuo-motor world models and bimanual manipulation capabilities.
The authors propose several benchmark tasks and evaluation metrics to assess the performance of robotic manipulation systems. These include object grasping, manipulation, and tool use, as well as more complex household chores like setting a table or making coffee. The dataset is designed to support research on large language models for orchestrating bimanual robots and biomimetic distributed control for anthropomorphic manipulation.
Critical Analysis
The dataset and benchmark tasks presented in this paper provide a valuable resource for advancing the state of the art in bimanual robot manipulation for household environments. However, the authors acknowledge that the dataset may not fully capture the complexity and variability of real-world household settings, and further research will be needed to ensure the generalization of the developed manipulation capabilities.
Additionally, while the dataset includes a diverse range of household objects and tasks, the authors could have considered incorporating more challenging manipulation challenges, such as deformable objects, liquids, or tools with complex affordances. Expanding the dataset in these directions could further push the boundaries of current robotic manipulation capabilities.
Conclusion
The "Empowering Embodied Manipulation" dataset represents a significant contribution to the field of household robotics. By providing a comprehensive and diverse dataset for robot manipulation, the authors have laid the foundation for the development of more capable and versatile robotic systems that can seamlessly assist humans in their daily lives. The proposed benchmark tasks and evaluation metrics will enable the research community to measure progress and drive innovation in this important area of robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Empowering Embodied Manipulation: A Bimanual-Mobile Robot Manipulation Dataset for Household Tasks
Tianle Zhang, Dongjiang Li, Yihang Li, Zecui Zeng, Lin Zhao, Lei Sun, Yue Chen, Xuelong Wei, Yibing Zhan, Lusong Li, Xiaodong He
The advancements in embodied AI are increasingly enabling robots to tackle complex real-world tasks, such as household manipulation. However, the deployment of robots in these environments remains constrained by the lack of comprehensive bimanual-mobile robot manipulation data that can be learned. Existing datasets predominantly focus on single-arm manipulation tasks, while the few dual-arm datasets available often lack mobility features, task diversity, comprehensive sensor data, and robust evaluation metrics; they fail to capture the intricate and dynamic nature of household manipulation tasks that bimanual-mobile robots are expected to perform. To overcome these limitations, we propose BRMData, a Bimanual-mobile Robot Manipulation Dataset specifically designed for household applications. BRMData encompasses 10 diverse household tasks, including single-arm and dual-arm tasks, as well as both tabletop and mobile manipulations, utilizing multi-view and depth-sensing data information. Moreover, BRMData features tasks of increasing difficulty, ranging from single-object to multi-object grasping, non-interactive to human-robot interactive scenarios, and rigid-object to flexible-object manipulation, closely simulating real-world household applications. Additionally, we introduce a novel Manipulation Efficiency Score (MES) metric to evaluate both the precision and efficiency of robot manipulation methods in household tasks. We thoroughly evaluate and analyze the performance of advanced robot manipulation learning methods using our BRMData, aiming to drive the development of bimanual-mobile robot manipulation technologies. The dataset is now open-sourced and available at https://embodiedrobot.github.io/.
Read more6/7/2024

0
A Comparison of Imitation Learning Algorithms for Bimanual Manipulation
Michael Drolet, Simon Stepputtis, Siva Kailas, Ajinkya Jain, Jan Peters, Stefan Schaal, Heni Ben Amor
Amidst the wide popularity of imitation learning algorithms in robotics, their properties regarding hyperparameter sensitivity, ease of training, data efficiency, and performance have not been well-studied in high-precision industry-inspired environments. In this work, we demonstrate the limitations and benefits of prominent imitation learning approaches and analyze their capabilities regarding these properties. We evaluate each algorithm on a complex bimanual manipulation task involving an over-constrained dynamics system in a setting involving multiple contacts between the manipulated object and the environment. While we find that imitation learning is well suited to solve such complex tasks, not all algorithms are equal in terms of handling environmental and hyperparameter perturbations, training requirements, performance, and ease of use. We investigate the empirical influence of these key characteristics by employing a carefully designed experimental procedure and learning environment. Paper website: https://bimanual-imitation.github.io/
Read more8/27/2024

0
PerAct2: A Perceiver Actor Framework for Bimanual Manipulation Tasks
Markus Grotz, Mohit Shridhar, Tamim Asfour, Dieter Fox
Bimanual manipulation is challenging due to precise spatial and temporal coordination required between two arms. While there exist several real-world bimanual systems, there is a lack of simulated benchmarks with a large task diversity for systematically studying bimanual capabilities across a wide range of tabletop tasks. This paper addresses the gap by extending RLBench to bimanual manipulation. We open-source our code and benchmark comprising 13 new tasks with 23 unique task variations, each requiring a high degree of coordination and adaptability. To kickstart the benchmark, we extended several state-of-the art methods to bimanual manipulation and also present a language-conditioned behavioral cloning agent -- PerAct2, which enables the learning and execution of bimanual 6-DoF manipulation tasks. Our novel network architecture efficiently integrates language processing with action prediction, allowing robots to understand and perform complex bimanual tasks in response to user-specified goals. Project website with code is available at: http://bimanual.github.io
Read more8/1/2024
0
A Survey of Embodied Learning for Object-Centric Robotic Manipulation
Ying Zheng, Lei Yao, Yuejiao Su, Yi Zhang, Yi Wang, Sicheng Zhao, Yiyi Zhang, Lap-Pui Chau
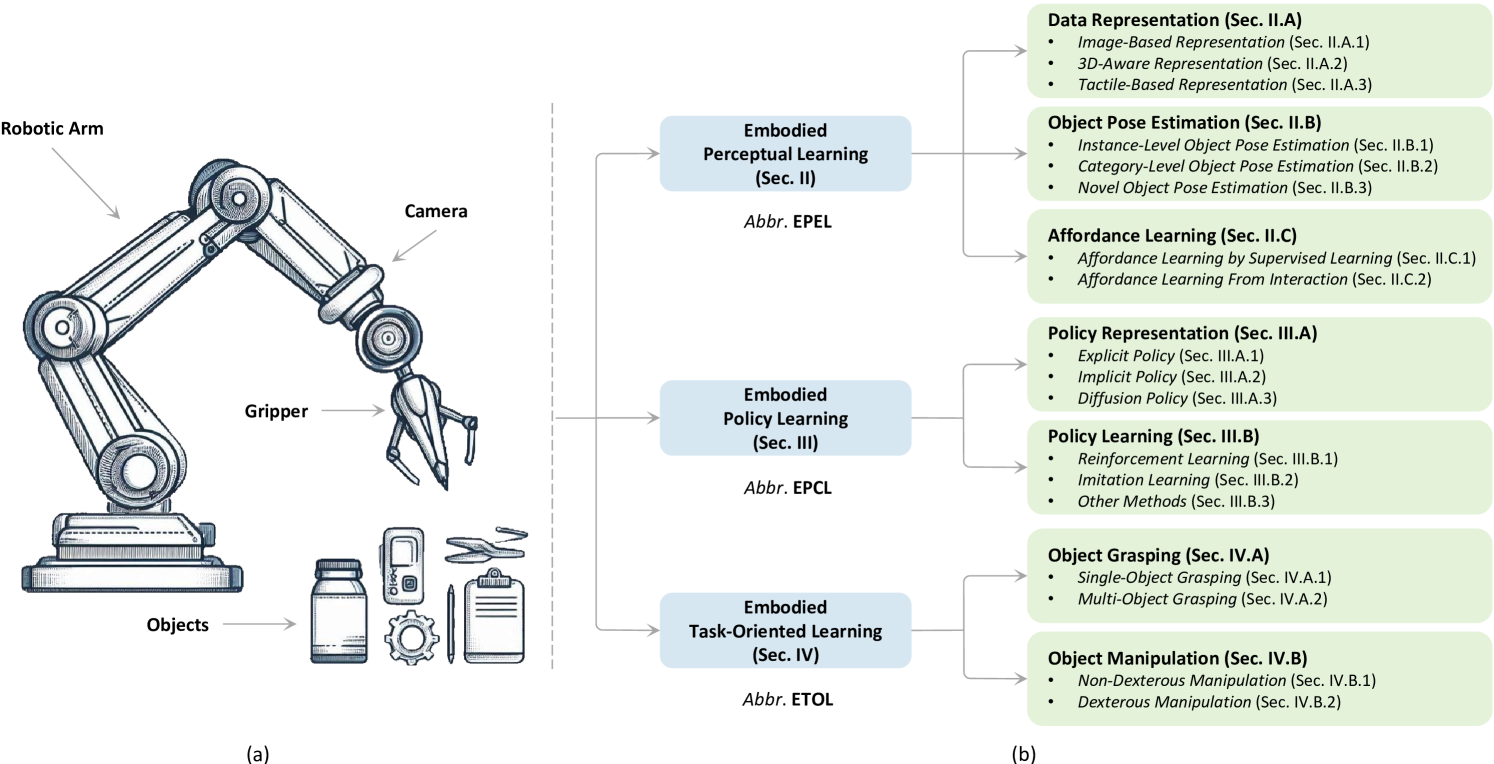
Embodied learning for object-centric robotic manipulation is a rapidly developing and challenging area in embodied AI. It is crucial for advancing next-generation intelligent robots and has garnered significant interest recently. Unlike data-driven machine learning methods, embodied learning focuses on robot learning through physical interaction with the environment and perceptual feedback, making it especially suitable for robotic manipulation. In this paper, we provide a comprehensive survey of the latest advancements in this field and categorize the existing work into three main branches: 1) Embodied perceptual learning, which aims to predict object pose and affordance through various data representations; 2) Embodied policy learning, which focuses on generating optimal robotic decisions using methods such as reinforcement learning and imitation learning; 3) Embodied task-oriented learning, designed to optimize the robot's performance based on the characteristics of different tasks in object grasping and manipulation. In addition, we offer an overview and discussion of public datasets, evaluation metrics, representative applications, current challenges, and potential future research directions. A project associated with this survey has been established at https://github.com/RayYoh/OCRM_survey.
Read more8/22/2024