Enabling Waypoint Generation for Collaborative Robots using LLMs and Mixed Reality

0

Sign in to get full access
Overview
- This paper explores a system for enabling collaborative robots to generate waypoints for manipulation tasks using large language models (LLMs) and mixed reality (MR) interfaces.
- The proposed approach aims to allow non-expert users to easily program robot behaviors through natural language instructions and intuitive MR interactions, without requiring complex robot programming skills.
- The system integrates LLMs to understand user commands and MR to visualize and interact with the robot's environment, enabling more natural and accessible robot programming.
Plain English Explanation
The paper describes a new way for people to program collaborative robots, or "cobots," to perform tasks. Typically, programming robots requires specialized technical knowledge. This can make it difficult for non-experts to use robots in their work or daily lives.
The researchers have developed a system that uses large language models and mixed reality (MR) to allow people to give the robot instructions using natural language and interact with the robot's environment in a more intuitive way.
With this system, a person could simply tell the robot what task they want it to do, and the robot would understand the instructions and create a plan to carry them out. The person can also use MR, like augmented reality, to visually see the robot and its surroundings and make adjustments to the robot's movements directly. This makes programming the robot much easier and more accessible for people who aren't robot experts.
The goal is to enable more widespread use of collaborative robots by making them easier for anyone to program and control, without requiring specialized technical skills. This could open up new applications for cobots in homes, offices, factories, and other settings where their versatility and safety features are beneficial.
Technical Explanation
The paper presents a system that combines large language models (LLMs) and mixed reality (MR) to enable non-expert users to generate waypoints for robot manipulation tasks.
The key components of the system include:
- An LLM-based natural language understanding module that can interpret user commands and translate them into robot-executable actions.
- An MR interface that allows users to visualize the robot's environment and interact with it intuitively, such as by placing virtual waypoints.
- A waypoint generation algorithm that takes the user's natural language instructions and MR interactions and converts them into a sequence of robot movements.
The researchers evaluated their system through a user study, where participants were asked to program a cobot to perform various manipulation tasks. The results showed that the proposed approach enabled significantly faster task completion times and higher user satisfaction compared to a traditional robot programming interface.
The authors argue that this integration of LLMs and MR can make robot programming more accessible to a wider range of users, opening up new opportunities for the deployment of collaborative robots in diverse settings.
Critical Analysis
The research presented in this paper offers a promising approach for enhancing the accessibility and usability of collaborative robots through the integration of advanced language understanding and intuitive mixed reality interfaces.
One key strength of the system is its ability to translate natural language instructions into robot-executable actions, which can greatly simplify the programming process for non-expert users. The MR interface also provides a more intuitive and engaging way for users to visualize and interact with the robot's environment, further reducing the barrier to entry.
However, the paper does acknowledge some limitations of the current implementation. For example, the natural language understanding module may not be able to handle all types of complex or ambiguous instructions, and the MR interface may not provide the level of precision required for certain manipulation tasks.
Additionally, the user study was relatively small in scale, and it would be valuable to explore the system's performance and scalability in more diverse real-world scenarios. Potential issues, such as the robustness of the language understanding to different accents or dialects, or the integration of the system with different robot hardware and software platforms, could also be examined in future research.
Overall, the work presented in this paper represents an important step towards more accessible and intuitive robot programming, with implications for a wide range of applications where collaborative robots could be beneficial. Continued research and development in this area could help to further democratize the use of robotics and unlock new possibilities for human-robot collaboration.
Conclusion
This paper introduces a novel system that leverages large language models and mixed reality to enable non-expert users to program collaborative robots more easily and intuitively. By translating natural language instructions into robot actions and providing a visual, interactive interface, the proposed approach aims to lower the barriers to entry for using cobots in a variety of settings.
The successful demonstration of this system in a user study suggests that it has the potential to expand the accessibility and adoption of collaborative robots, particularly in scenarios where non-technical users need to program the robots to perform tasks. As the capabilities of language models and mixed reality continue to advance, this type of integrated approach could become an increasingly valuable tool for bringing the benefits of robotics to a wider audience.
Overall, the research presented in this paper represents an important step forward in making robot programming more accessible and intuitive, with promising implications for the future of human-robot collaboration.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Enabling Waypoint Generation for Collaborative Robots using LLMs and Mixed Reality
Cathy Mengying Fang, Krzysztof Zieli'nski, Pattie Maes, Joe Paradiso, Bruce Blumberg, Mikkel Baun Kj{ae}rgaard
Programming a robotic is a complex task, as it demands the user to have a good command of specific programming languages and awareness of the robot's physical constraints. We propose a framework that simplifies robot deployment by allowing direct communication using natural language. It uses large language models (LLM) for prompt processing, workspace understanding, and waypoint generation. It also employs Augmented Reality (AR) to provide visual feedback of the planned outcome. We showcase the effectiveness of our framework with a simple pick-and-place task, which we implement on a real robot. Moreover, we present an early concept of expressive robot behavior and skill generation that can be used to communicate with the user and learn new skills (e.g., object grasping).
Read more7/18/2024
📈
0
Enhancing the LLM-Based Robot Manipulation Through Human-Robot Collaboration
Haokun Liu, Yaonan Zhu, Kenji Kato, Atsushi Tsukahara, Izumi Kondo, Tadayoshi Aoyama, Yasuhisa Hasegawa
Large Language Models (LLMs) are gaining popularity in the field of robotics. However, LLM-based robots are limited to simple, repetitive motions due to the poor integration between language models, robots, and the environment. This paper proposes a novel approach to enhance the performance of LLM-based autonomous manipulation through Human-Robot Collaboration (HRC). The approach involves using a prompted GPT-4 language model to decompose high-level language commands into sequences of motions that can be executed by the robot. The system also employs a YOLO-based perception algorithm, providing visual cues to the LLM, which aids in planning feasible motions within the specific environment. Additionally, an HRC method is proposed by combining teleoperation and Dynamic Movement Primitives (DMP), allowing the LLM-based robot to learn from human guidance. Real-world experiments have been conducted using the Toyota Human Support Robot for manipulation tasks. The outcomes indicate that tasks requiring complex trajectory planning and reasoning over environments can be efficiently accomplished through the incorporation of human demonstrations.
Read more7/2/2024
🤯
0
Immersive Robot Programming Interface for Human-Guided Automation and Randomized Path Planning
Kaveh Malek, Claus Danielson, Fernando Moreu
Researchers are exploring Augmented Reality (AR) interfaces for online robot programming to streamline automation and user interaction in variable manufacturing environments. This study introduces an AR interface for online programming and data visualization that integrates the human in the randomized robot path planning, reducing the inherent randomness of the methods with human intervention. The interface uses holographic items which correspond to physical elements to interact with a redundant manipulator. Utilizing Rapidly Random Tree Star (RRT*) and Spherical Linear Interpolation (SLERP) algorithms, the interface achieves end-effector s progression through collision-free path with smooth rotation. Next, Sequential Quadratic Programming (SQP) achieve robot s configurations for this progression. The platform executes the RRT* algorithm in a loop, with each iteration independently exploring the shortest path through random sampling, leading to variations in the optimized paths produced. These paths are then demonstrated to AR users, who select the most appropriate path based on the environmental context and their intuition. The accuracy and effectiveness of the interface are validated through its implementation and testing with a seven Degree-OF-Freedom (DOF) manipulator, indicating its potential to advance current practices in robot programming. The validation of this paper include two implementations demonstrating the value of human-in-the-loop and context awareness in robotics.
Read more6/6/2024
0
Towards Natural Language-Driven Assembly Using Foundation Models
Omkar Joglekar, Tal Lancewicki, Shir Kozlovsky, Vladimir Tchuiev, Zohar Feldman, Dotan Di Castro
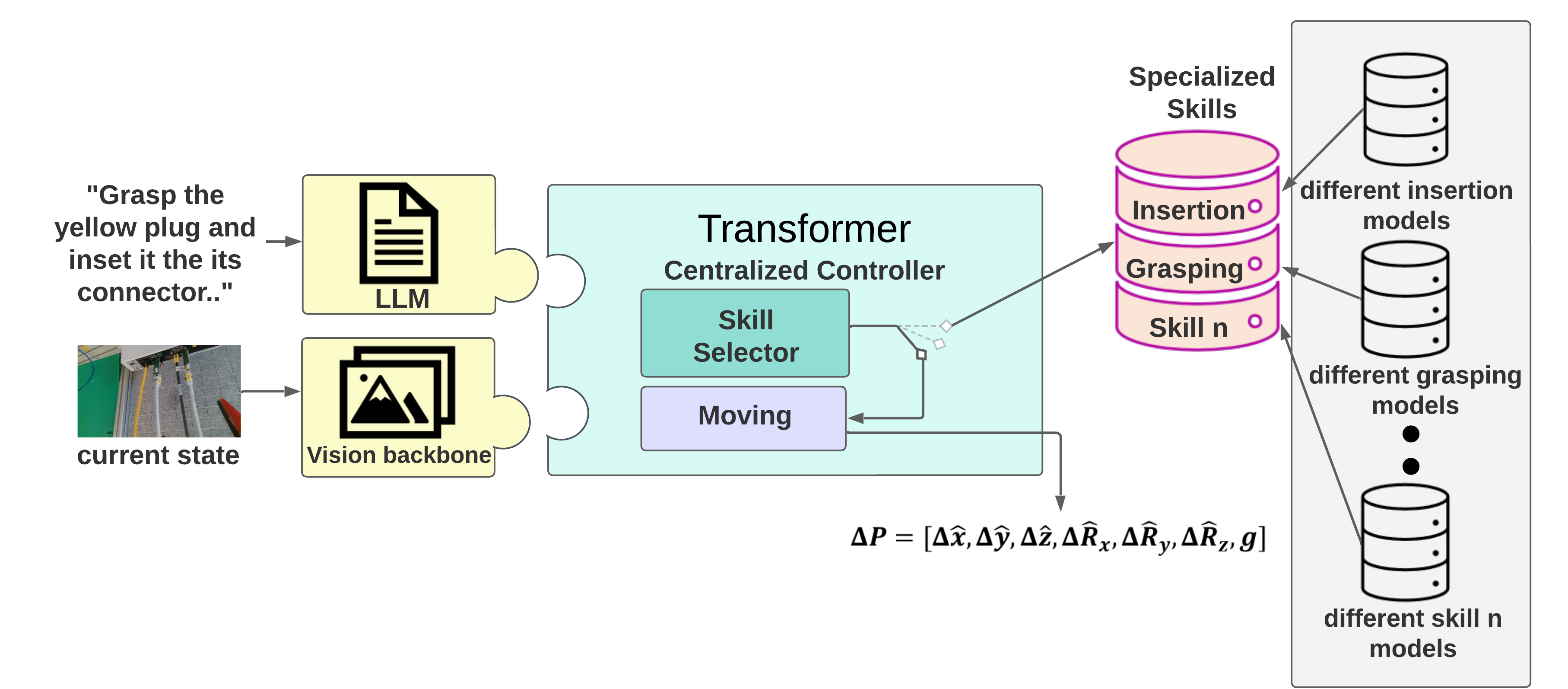
Large Language Models (LLMs) and strong vision models have enabled rapid research and development in the field of Vision-Language-Action models that enable robotic control. The main objective of these methods is to develop a generalist policy that can control robots with various embodiments. However, in industrial robotic applications such as automated assembly and disassembly, some tasks, such as insertion, demand greater accuracy and involve intricate factors like contact engagement, friction handling, and refined motor skills. Implementing these skills using a generalist policy is challenging because these policies might integrate further sensory data, including force or torque measurements, for enhanced precision. In our method, we present a global control policy based on LLMs that can transfer the control policy to a finite set of skills that are specifically trained to perform high-precision tasks through dynamic context switching. The integration of LLMs into this framework underscores their significance in not only interpreting and processing language inputs but also in enriching the control mechanisms for diverse and intricate robotic operations.
Read more6/26/2024