Enhancing mmWave Radar Point Cloud via Visual-inertial Supervision
2404.17229
0
0
Abstract
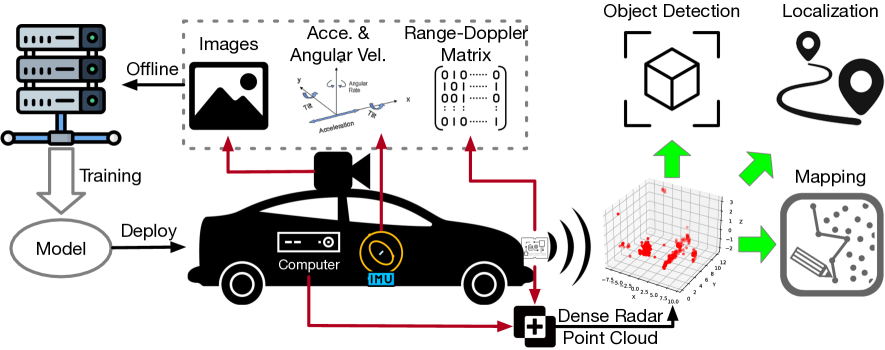
Complementary to prevalent LiDAR and camera systems, millimeter-wave (mmWave) radar is robust to adverse weather conditions like fog, rainstorms, and blizzards but offers sparse point clouds. Current techniques enhance the point cloud by the supervision of LiDAR's data. However, high-performance LiDAR is notably expensive and is not commonly available on vehicles. This paper presents mmEMP, a supervised learning approach that enhances radar point clouds using a low-cost camera and an inertial measurement unit (IMU), enabling crowdsourcing training data from commercial vehicles. Bringing the visual-inertial (VI) supervision is challenging due to the spatial agnostic of dynamic objects. Moreover, spurious radar points from the curse of RF multipath make robots misunderstand the scene. mmEMP first devises a dynamic 3D reconstruction algorithm that restores the 3D positions of dynamic features. Then, we design a neural network that densifies radar data and eliminates spurious radar points. We build a new dataset in the real world. Extensive experiments show that mmEMP achieves competitive performance compared with the SOTA approach training by LiDAR's data. In addition, we use the enhanced point cloud to perform object detection, localization, and mapping to demonstrate mmEMP's effectiveness.
Create account to get full access
Overview
• This paper presents a method for enhancing the point cloud generated by millimeter-wave (mmWave) radar sensors using visual and inertial data as supervision.
• The proposed approach leverages the complementary nature of radar, camera, and inertial measurement unit (IMU) data to improve the quality and accuracy of the radar point cloud.
• The researchers demonstrate that their method can outperform existing radar-only and radar-camera fusion techniques on various benchmarks, leading to more robust and reliable perception for autonomous systems.
Plain English Explanation
Radar sensors, which use radio waves to detect and measure the distance of objects, are a crucial component of many autonomous systems, such as self-driving cars. However, the point cloud (a 3D representation of the environment) generated by radar sensors can be noisy and incomplete, making it difficult to accurately perceive the surroundings.
To address this issue, the researchers in this paper proposed a method that combines radar data with information from cameras and inertial sensors to enhance the quality of the radar point cloud. Cameras provide visual information about the environment, while inertial sensors measure the movement and orientation of the sensor system.
By integrating these different data sources, the researchers were able to create a more detailed and accurate representation of the environment, which could be particularly helpful for autonomous systems navigating complex and dynamic scenes. The key insight is that the strengths of one sensor can help compensate for the weaknesses of another, leading to a more robust and reliable perception system.
Technical Explanation
The researchers developed a deep learning-based framework that takes in the raw radar point cloud, along with synchronized camera images and inertial measurements, and outputs an enhanced radar point cloud. The architecture consists of several key components:
-
Radar Point Cloud Encoder: This module encodes the raw radar point cloud into a compact feature representation, which can capture the spatial and semantic information in the data.
-
Camera-Inertial Perception Module: This module processes the camera images and inertial measurements to extract complementary information about the environment, such as object locations, orientations, and motion.
-
Fusion and Refinement Module: This module combines the encoded radar features with the camera-inertial perception outputs and refines the radar point cloud, generating a more accurate and complete representation of the scene.
The researchers trained and evaluated their model on various datasets, including the KITTI and nuScenes benchmarks, which contain synchronized multi-modal sensor data. They compared their approach to state-of-the-art radar-only and radar-camera fusion methods, demonstrating significant improvements in point cloud quality and downstream task performance, such as object detection and tracking.
Critical Analysis
The researchers acknowledge several limitations and avenues for future work. For example, the current framework assumes perfect synchronization between the radar, camera, and inertial sensors, which may not always be the case in real-world scenarios. Additionally, the model was trained and evaluated on relatively small-scale datasets, and its performance on larger and more diverse datasets remains to be explored.
One potential concern is the computational complexity of the proposed approach, as the fusion and refinement module may incur significant processing overhead, which could be a challenge for real-time applications. The researchers could consider investigating more efficient network architectures or inference techniques to address this issue.
Furthermore, the paper does not provide a comprehensive analysis of the robustness of the method to sensor failures or environmental conditions, such as poor visibility or sensor occlusions. Evaluating the system's performance under these challenging scenarios would be crucial for assessing its practical applicability in real-world autonomous systems.
Conclusion
This paper presents a promising approach for enhancing the quality of mmWave radar point clouds by leveraging visual and inertial data as supervision. The proposed framework demonstrates significant improvements over existing radar-only and radar-camera fusion techniques, suggesting that the integration of complementary sensor modalities can lead to more robust and reliable perception for autonomous systems.
While the paper addresses several important challenges in radar-based perception, the researchers have identified areas for further investigation, such as handling sensor synchronization issues, improving computational efficiency, and evaluating the system's robustness to real-world conditions. Addressing these remaining challenges could pave the way for more widespread adoption of the proposed technique in practical autonomous applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Diffusion-Based Point Cloud Super-Resolution for mmWave Radar Data
Kai Luan, Chenghao Shi, Neng Wang, Yuwei Cheng, Huimin Lu, Xieyuanli Chen
0
0
The millimeter-wave radar sensor maintains stable performance under adverse environmental conditions, making it a promising solution for all-weather perception tasks, such as outdoor mobile robotics. However, the radar point clouds are relatively sparse and contain massive ghost points, which greatly limits the development of mmWave radar technology. In this paper, we propose a novel point cloud super-resolution approach for 3D mmWave radar data, named Radar-diffusion. Our approach employs the diffusion model defined by mean-reverting stochastic differential equations(SDE). Using our proposed new objective function with supervision from corresponding LiDAR point clouds, our approach efficiently handles radar ghost points and enhances the sparse mmWave radar point clouds to dense LiDAR-like point clouds. We evaluate our approach on two different datasets, and the experimental results show that our method outperforms the state-of-the-art baseline methods in 3D radar super-resolution tasks. Furthermore, we demonstrate that our enhanced radar point cloud is capable of downstream radar point-based registration tasks.
4/10/2024

Enhanced Radar Perception via Multi-Task Learning: Towards Refined Data for Sensor Fusion Applications
Huawei Sun, Hao Feng, Gianfranco Mauro, Julius Ott, Georg Stettinger, Lorenzo Servadei, Robert Wille
0
0
Radar and camera fusion yields robustness in perception tasks by leveraging the strength of both sensors. The typical extracted radar point cloud is 2D without height information due to insufficient antennas along the elevation axis, which challenges the network performance. This work introduces a learning-based approach to infer the height of radar points associated with 3D objects. A novel robust regression loss is introduced to address the sparse target challenge. In addition, a multi-task training strategy is employed, emphasizing important features. The average radar absolute height error decreases from 1.69 to 0.25 meters compared to the state-of-the-art height extension method. The estimated target height values are used to preprocess and enrich radar data for downstream perception tasks. Integrating this refined radar information further enhances the performance of existing radar camera fusion models for object detection and depth estimation tasks.
4/10/2024
👁️
DenserRadar: A 4D millimeter-wave radar point cloud detector based on dense LiDAR point clouds
Zeyu Han, Junkai Jiang, Xiaokang Ding, Qingwen Meng, Shaobing Xu, Lei He, Jianqiang Wang
0
0
The 4D millimeter-wave (mmWave) radar, with its robustness in extreme environments, extensive detection range, and capabilities for measuring velocity and elevation, has demonstrated significant potential for enhancing the perception abilities of autonomous driving systems in corner-case scenarios. Nevertheless, the inherent sparsity and noise of 4D mmWave radar point clouds restrict its further development and practical application. In this paper, we introduce a novel 4D mmWave radar point cloud detector, which leverages high-resolution dense LiDAR point clouds. Our approach constructs dense 3D occupancy ground truth from stitched LiDAR point clouds, and employs a specially designed network named DenserRadar. The proposed method surpasses existing probability-based and learning-based radar point cloud detectors in terms of both point cloud density and accuracy on the K-Radar dataset.
5/9/2024

New!Generative AI Empowered LiDAR Point Cloud Generation with Multimodal Transformer
Mohammad Farzanullah, Han Zhang, Akram Bin Sediq, Ali Afana, Melike Erol-Kantarci
0
0
Integrated sensing and communications is a key enabler for the 6G wireless communication systems. The multiple sensing modalities will allow the base station to have a more accurate representation of the environment, leading to context-aware communications. Some widely equipped sensors such as cameras and RADAR sensors can provide some environmental perceptions. However, they are not enough to generate precise environmental representations, especially in adverse weather conditions. On the other hand, the LiDAR sensors provide more accurate representations, however, their widespread adoption is hindered by their high cost. This paper proposes a novel approach to enhance the wireless communication systems by synthesizing LiDAR point clouds from images and RADAR data. Specifically, it uses a multimodal transformer architecture and pre-trained encoding models to enable an accurate LiDAR generation. The proposed framework is evaluated on the DeepSense 6G dataset, which is a real-world dataset curated for context-aware wireless applications. Our results demonstrate the efficacy of the proposed approach in accurately generating LiDAR point clouds. We achieve a modified mean squared error of 10.3931. Visual examination of the images indicates that our model can successfully capture the majority of structures present in the LiDAR point cloud for diverse environments. This will enable the base stations to achieve more precise environmental sensing. By integrating LiDAR synthesis with existing sensing modalities, our method can enhance the performance of various wireless applications, including beam and blockage prediction.
6/28/2024