Enhanced Radar Perception via Multi-Task Learning: Towards Refined Data for Sensor Fusion Applications
2404.06165
0
0

Abstract
Radar and camera fusion yields robustness in perception tasks by leveraging the strength of both sensors. The typical extracted radar point cloud is 2D without height information due to insufficient antennas along the elevation axis, which challenges the network performance. This work introduces a learning-based approach to infer the height of radar points associated with 3D objects. A novel robust regression loss is introduced to address the sparse target challenge. In addition, a multi-task training strategy is employed, emphasizing important features. The average radar absolute height error decreases from 1.69 to 0.25 meters compared to the state-of-the-art height extension method. The estimated target height values are used to preprocess and enrich radar data for downstream perception tasks. Integrating this refined radar information further enhances the performance of existing radar camera fusion models for object detection and depth estimation tasks.
Create account to get full access
Overview
- This paper presents a multi-task learning approach to enhance radar perception for sensor fusion applications
- The proposed method aims to improve the quality and accuracy of radar data, enabling more effective integration with other sensors like cameras and LiDAR
- Key tasks addressed include object detection, distance estimation, and angle estimation, which are critical for applications like autonomous driving and robotics
Plain English Explanation
The researchers have developed a new way to improve the performance of radar sensors, which are commonly used in self-driving cars and other autonomous systems. Radar sensors provide important information about the surrounding environment, such as the location and speed of objects, but the data they collect can sometimes be noisy or incomplete.
To address this, the researchers used a machine learning technique called "multi-task learning." This allows the radar system to learn multiple related tasks simultaneously, such as detecting objects, estimating their distance, and determining their angle. By training the system to excel at these interconnected tasks, the researchers were able to improve the overall quality and accuracy of the radar data.
This more refined radar information can then be more effectively combined with data from other sensors, like cameras and LiDAR, to create a comprehensive understanding of the vehicle's surroundings. This is crucial for applications like autonomous driving and robotics, where reliable perception of the environment is essential for safe and efficient operation.
Technical Explanation
The paper proposes a multi-task learning framework to enhance radar perception for sensor fusion applications. The key tasks addressed include object detection, distance estimation, and angle estimation, which are critical for downstream applications like autonomous driving and robotics.
The authors design a neural network architecture that jointly learns these related tasks, leveraging the synergies between them to improve overall performance. The multi-task setup allows the network to learn more robust and generalizable features, leading to more accurate and reliable radar data.
The authors conduct extensive experiments on a large-scale automotive radar dataset, evaluating the proposed approach against several baselines. The results demonstrate significant improvements in object detection, distance estimation, and angle estimation, compared to single-task learning approaches.
Furthermore, the authors show that the enhanced radar data can be more effectively integrated with other sensor modalities, such as cameras and LiDAR, leading to more accurate and robust sensor fusion for autonomous systems.
Critical Analysis
The paper presents a compelling approach for enhancing radar perception through multi-task learning. By jointly optimizing for related tasks, the proposed method is able to extract more informative features from the radar data, leading to improved performance across the board.
However, the authors acknowledge that their evaluation was conducted on a single, albeit large-scale, automotive radar dataset. It would be valuable to see how the approach generalizes to other radar modalities and application domains, such as robotics or security, to further validate its effectiveness.
Additionally, while the paper highlights the benefits of the enhanced radar data for sensor fusion, it would be interesting to see a more in-depth analysis of the downstream impact on the overall system performance, especially in complex real-world scenarios.
Lastly, the authors do not delve into the potential computational or memory overhead of the multi-task learning approach, which could be an important consideration for deployment on resource-constrained platforms like autonomous vehicles.
Conclusion
This paper presents a novel multi-task learning framework for enhancing radar perception, with the goal of improving the quality and accuracy of radar data for sensor fusion applications. By jointly optimizing for object detection, distance estimation, and angle estimation, the proposed approach is able to extract more informative features from the radar signals, leading to significant performance improvements.
The authors demonstrate the effectiveness of their method on a large-scale automotive radar dataset, and show that the enhanced radar data can be more effectively integrated with other sensor modalities, such as cameras and LiDAR, for more robust and reliable perception in autonomous systems.
This research represents an important step forward in advancing radar technology, which is a critical component of many cutting-edge applications, including autonomous driving, robotics, and security. The ability to refine radar data through multi-task learning opens up new opportunities for more effective sensor fusion and more reliable decision-making in complex real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Enhancing mmWave Radar Point Cloud via Visual-inertial Supervision
Cong Fan, Shengkai Zhang, Kezhong Liu, Shuai Wang, Zheng Yang, Wei Wang
0
0
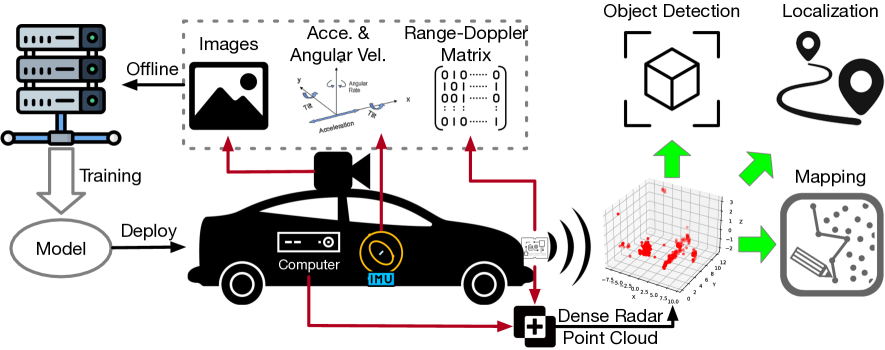
Complementary to prevalent LiDAR and camera systems, millimeter-wave (mmWave) radar is robust to adverse weather conditions like fog, rainstorms, and blizzards but offers sparse point clouds. Current techniques enhance the point cloud by the supervision of LiDAR's data. However, high-performance LiDAR is notably expensive and is not commonly available on vehicles. This paper presents mmEMP, a supervised learning approach that enhances radar point clouds using a low-cost camera and an inertial measurement unit (IMU), enabling crowdsourcing training data from commercial vehicles. Bringing the visual-inertial (VI) supervision is challenging due to the spatial agnostic of dynamic objects. Moreover, spurious radar points from the curse of RF multipath make robots misunderstand the scene. mmEMP first devises a dynamic 3D reconstruction algorithm that restores the 3D positions of dynamic features. Then, we design a neural network that densifies radar data and eliminates spurious radar points. We build a new dataset in the real world. Extensive experiments show that mmEMP achieves competitive performance compared with the SOTA approach training by LiDAR's data. In addition, we use the enhanced point cloud to perform object detection, localization, and mapping to demonstrate mmEMP's effectiveness.
4/29/2024

Diffusion-Based Point Cloud Super-Resolution for mmWave Radar Data
Kai Luan, Chenghao Shi, Neng Wang, Yuwei Cheng, Huimin Lu, Xieyuanli Chen
0
0
The millimeter-wave radar sensor maintains stable performance under adverse environmental conditions, making it a promising solution for all-weather perception tasks, such as outdoor mobile robotics. However, the radar point clouds are relatively sparse and contain massive ghost points, which greatly limits the development of mmWave radar technology. In this paper, we propose a novel point cloud super-resolution approach for 3D mmWave radar data, named Radar-diffusion. Our approach employs the diffusion model defined by mean-reverting stochastic differential equations(SDE). Using our proposed new objective function with supervision from corresponding LiDAR point clouds, our approach efficiently handles radar ghost points and enhances the sparse mmWave radar point clouds to dense LiDAR-like point clouds. We evaluate our approach on two different datasets, and the experimental results show that our method outperforms the state-of-the-art baseline methods in 3D radar super-resolution tasks. Furthermore, we demonstrate that our enhanced radar point cloud is capable of downstream radar point-based registration tasks.
4/10/2024
🌿
Talk2Radar: Bridging Natural Language with 4D mmWave Radar for 3D Referring Expression Comprehension
Runwei Guan, Ruixiao Zhang, Ningwei Ouyang, Jianan Liu, Ka Lok Man, Xiaohao Cai, Ming Xu, Jeremy Smith, Eng Gee Lim, Yutao Yue, Hui Xiong
0
0
Embodied perception is essential for intelligent vehicles and robots, enabling more natural interaction and task execution. However, these advancements currently embrace vision level, rarely focusing on using 3D modeling sensors, which limits the full understanding of surrounding objects with multi-granular characteristics. Recently, as a promising automotive sensor with affordable cost, 4D Millimeter-Wave radar provides denser point clouds than conventional radar and perceives both semantic and physical characteristics of objects, thus enhancing the reliability of perception system. To foster the development of natural language-driven context understanding in radar scenes for 3D grounding, we construct the first dataset, Talk2Radar, which bridges these two modalities for 3D Referring Expression Comprehension. Talk2Radar contains 8,682 referring prompt samples with 20,558 referred objects. Moreover, we propose a novel model, T-RadarNet for 3D REC upon point clouds, achieving state-of-the-art performances on Talk2Radar dataset compared with counterparts, where Deformable-FPN and Gated Graph Fusion are meticulously designed for efficient point cloud feature modeling and cross-modal fusion between radar and text features, respectively. Further, comprehensive experiments are conducted to give a deep insight into radar-based 3D REC. We release our project at https://github.com/GuanRunwei/Talk2Radar.
5/22/2024
🔎
Multi-Object Tracking based on Imaging Radar 3D Object Detection
Patrick Palmer, Martin Kruger, Richard Altendorfer, Torsten Bertram
0
0
Effective tracking of surrounding traffic participants allows for an accurate state estimation as a necessary ingredient for prediction of future behavior and therefore adequate planning of the ego vehicle trajectory. One approach for detecting and tracking surrounding traffic participants is the combination of a learning based object detector with a classical tracking algorithm. Learning based object detectors have been shown to work adequately on lidar and camera data, while learning based object detectors using standard radar data input have proven to be inferior. Recently, with the improvements to radar sensor technology in the form of imaging radars, the object detection performance on radar was greatly improved but is still limited compared to lidar sensors due to the sparsity of the radar point cloud. This presents a unique challenge for the task of multi-object tracking. The tracking algorithm must overcome the limited detection quality while generating consistent tracks. To this end, a comparison between different multi-object tracking methods on imaging radar data is required to investigate its potential for downstream tasks. The work at hand compares multiple approaches and analyzes their limitations when applied to imaging radar data. Furthermore, enhancements to the presented approaches in the form of probabilistic association algorithms are considered for this task.
6/4/2024