Enhancing Pedestrian Trajectory Prediction with Crowd Trip Information

0
Sign in to get full access
Overview
- The paper proposes a method to enhance pedestrian trajectory prediction by incorporating crowd trip information.
- It leverages historical crowd flow data to better anticipate pedestrian movements.
- The approach outperforms state-of-the-art methods on benchmark datasets.
Plain English Explanation
The paper focuses on improving the ability to predict where pedestrians will move in the future. Pedestrian trajectory prediction is an important task for applications like autonomous vehicles and video surveillance.
The key innovation is using historical data on how crowds of people typically move through an environment. By learning from this crowd trip information, the model can better anticipate where an individual pedestrian is likely to go next. For example, it may learn that people often take a certain path to reach a popular destination.
The researchers tested their approach on benchmark datasets and found it outperformed other state-of-the-art pedestrian motion prediction methods. This suggests the crowd trip data provides valuable additional context that can enhance trajectory forecasting.
Technical Explanation
The paper introduces a novel framework called "Crowd Trip-enhanced Pedestrian Trajectory Prediction" (CTPTP). It consists of two main components:
-
Crowd Trip Encoder: This module learns representations of typical crowd movements from historical trajectory data. It captures patterns in how crowds flow through the environment.
-
Trajectory Prediction Module: This takes the crowd trip encoding, combines it with the current state of the pedestrian, and outputs a prediction of their future trajectory.
The crowd trip encoder uses a transformer-based architecture to process the crowd data. This spatial-social situation-aware approach allows the model to learn rich representations of crowd dynamics.
Experiments on challenging benchmark datasets show CTPTP outperforming prior state-of-the-art methods for pedestrian trajectory forecasting. The crowd trip information provides valuable contextual cues that enhance the prediction accuracy.
Critical Analysis
The paper makes a compelling case for the value of crowd trip data in improving pedestrian trajectory prediction. However, it does not deeply explore the limitations of this approach.
For example, the model may struggle in dynamic environments where crowd patterns are in flux. It also requires access to detailed historical trajectory data, which may not be available in all real-world settings.
Additionally, the paper does not investigate potential biases or privacy concerns that could arise from leveraging crowd movement data. These are important considerations for deployed systems.
Further research could explore ways to make the approach more robust and adaptable to diverse environments. Accounting for the ethical implications of using crowd data would also be a valuable direction.
Conclusion
This paper presents a novel framework that enhances pedestrian trajectory prediction by incorporating crowd trip information. The results demonstrate the power of leveraging collective movement patterns to anticipate the future paths of individual pedestrians.
While the approach shows promise, there are opportunities to further develop it and address potential limitations. Overall, the work highlights an innovative way to improve a critical task in areas like autonomous navigation and video analytics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Enhancing Pedestrian Trajectory Prediction with Crowd Trip Information
Rei Tamaru, Pei Li, Bin Ran
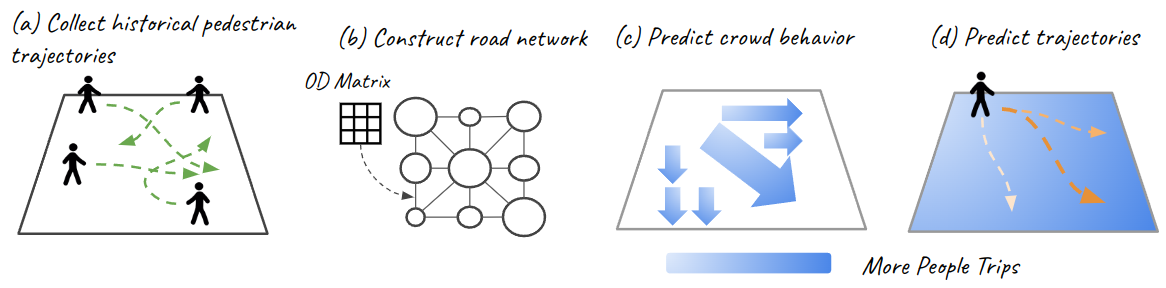
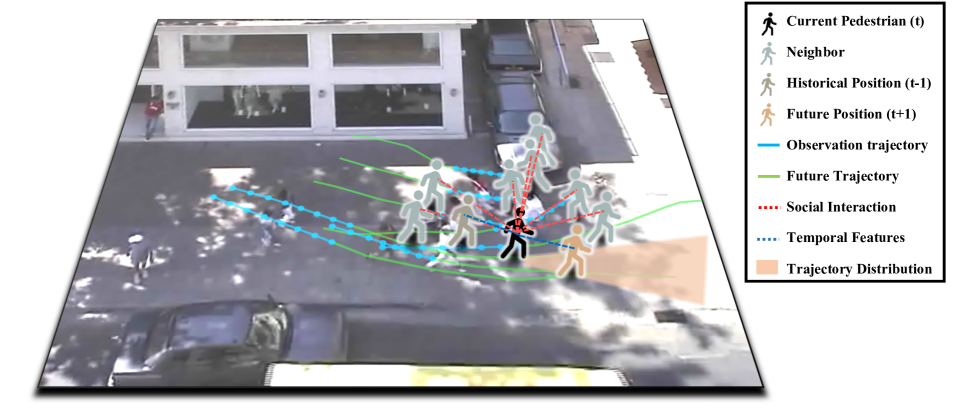
Pedestrian trajectory prediction is essential for various applications in active traffic management, urban planning, traffic control, crowd management, and autonomous driving, aiming to enhance traffic safety and efficiency. Accurately predicting pedestrian trajectories requires a deep understanding of individual behaviors, social interactions, and road environments. Existing studies have developed various models to capture the influence of social interactions and road conditions on pedestrian trajectories. However, these approaches are limited by the lack of a comprehensive view of social interactions and road environments. To address these limitations and enhance the accuracy of pedestrian trajectory prediction, we propose a novel approach incorporating trip information as a new modality into pedestrian trajectory models. We propose RNTransformer, a generic model that utilizes crowd trip information to capture global information on social interactions. We incorporated RNTransformer with various socially aware local pedestrian trajectory prediction models to demonstrate its performance. Specifically, by leveraging a pre-trained RNTransformer when training different pedestrian trajectory prediction models, we observed improvements in performance metrics: a 1.3/2.2% enhancement in ADE/FDE on Social-LSTM, a 6.5/28.4% improvement on Social-STGCNN, and an 8.6/4.3% improvement on S-Implicit. Evaluation results demonstrate that RNTransformer significantly enhances the accuracy of various pedestrian trajectory prediction models across multiple datasets. Further investigation reveals that the RNTransformer effectively guides local models to more accurate directions due to the consideration of global information. By exploring crowd behavior within the road network, our approach shows great promise in improving pedestrian safety through accurate trajectory predictions.
Read more9/24/2024
0
Attention-aware Social Graph Transformer Networks for Stochastic Trajectory Prediction
Yao Liu, Binghao Li, Xianzhi Wang, Claude Sammut, Lina Yao
Trajectory prediction is fundamental to various intelligent technologies, such as autonomous driving and robotics. The motion prediction of pedestrians and vehicles helps emergency braking, reduces collisions, and improves traffic safety. Current trajectory prediction research faces problems of complex social interactions, high dynamics and multi-modality. Especially, it still has limitations in long-time prediction. We propose Attention-aware Social Graph Transformer Networks for multi-modal trajectory prediction. We combine Graph Convolutional Networks and Transformer Networks by generating stable resolution pseudo-images from Spatio-temporal graphs through a designed stacking and interception method. Furthermore, we design the attention-aware module to handle social interaction information in scenarios involving mixed pedestrian-vehicle traffic. Thus, we maintain the advantages of the Graph and Transformer, i.e., the ability to aggregate information over an arbitrary number of neighbors and the ability to perform complex time-dependent data processing. We conduct experiments on datasets involving pedestrian, vehicle, and mixed trajectories, respectively. Our results demonstrate that our model minimizes displacement errors across various metrics and significantly reduces the likelihood of collisions. It is worth noting that our model effectively reduces the final displacement error, illustrating the ability of our model to predict for a long time.
Read more5/14/2024
0
Context-aware Multi-task Learning for Pedestrian Intent and Trajectory Prediction
Farzeen Munir, Tomasz Piotr Kucner
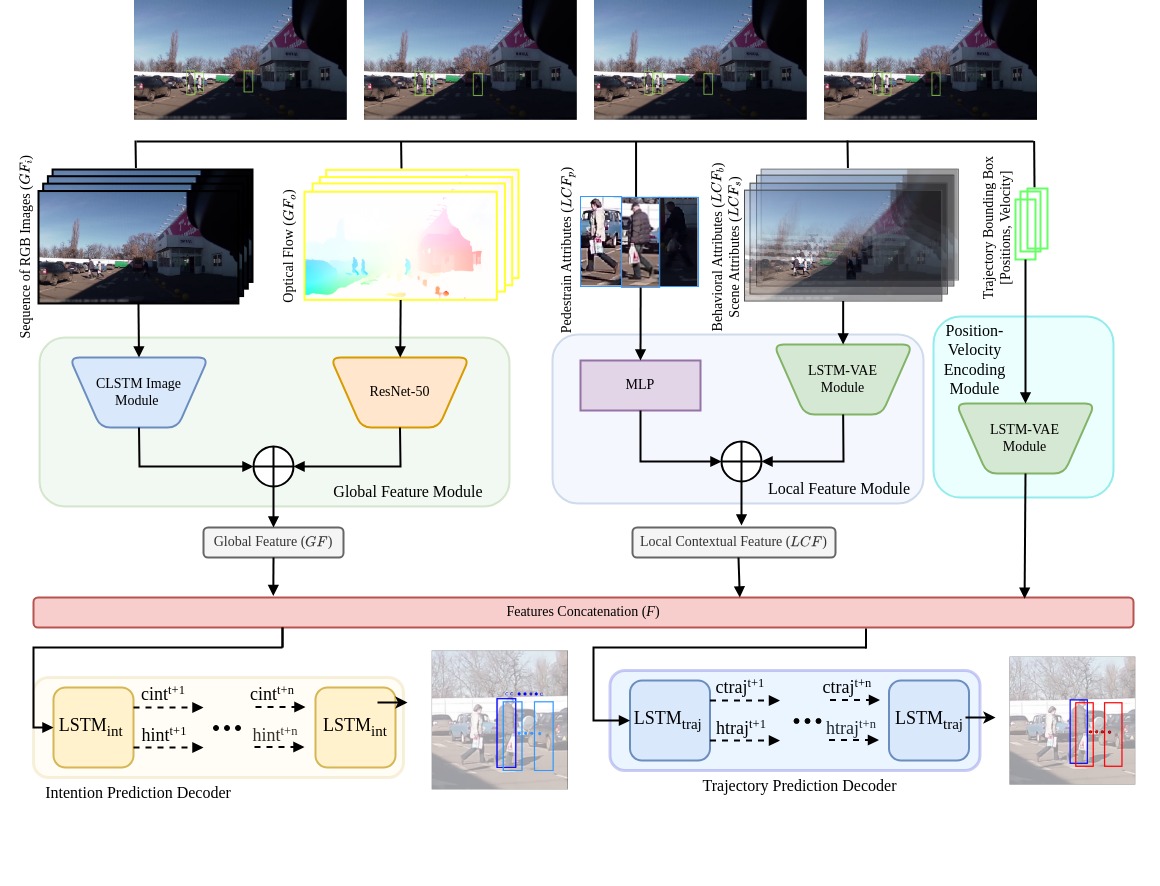
The advancement of socially-aware autonomous vehicles hinges on precise modeling of human behavior. Within this broad paradigm, the specific challenge lies in accurately predicting pedestrian's trajectory and intention. Traditional methodologies have leaned heavily on historical trajectory data, frequently overlooking vital contextual cues such as pedestrian-specific traits and environmental factors. Furthermore, there's a notable knowledge gap as trajectory and intention prediction have largely been approached as separate problems, despite their mutual dependence. To bridge this gap, we introduce PTINet (Pedestrian Trajectory and Intention Prediction Network), which jointly learns the trajectory and intention prediction by combining past trajectory observations, local contextual features (individual pedestrian behaviors), and global features (signs, markings etc.). The efficacy of our approach is evaluated on widely used public datasets: JAAD and PIE, where it has demonstrated superior performance over existing state-of-the-art models in trajectory and intention prediction. The results from our experiments and ablation studies robustly validate PTINet's effectiveness in jointly exploring intention and trajectory prediction for pedestrian behaviour modelling. The experimental evaluation indicates the advantage of using global and local contextual features for pedestrian trajectory and intention prediction. The effectiveness of PTINet in predicting pedestrian behavior paves the way for the development of automated systems capable of seamlessly interacting with pedestrians in urban settings.
Read more7/25/2024

0
Pedestrian Motion Prediction Using Transformer-based Behavior Clustering and Data-Driven Reachability Analysis
Kleio Fragkedaki, Frank J. Jiang, Karl H. Johansson, Jonas M{aa}rtensson
In this work, we present a transformer-based framework for predicting future pedestrian states based on clustered historical trajectory data. In previous studies, researchers propose enhancing pedestrian trajectory predictions by using manually crafted labels to categorize pedestrian behaviors and intentions. However, these approaches often only capture a limited range of pedestrian behaviors and introduce human bias into the predictions. To alleviate the dependency on manually crafted labels, we utilize a transformer encoder coupled with hierarchical density-based clustering to automatically identify diverse behavior patterns, and use these clusters in data-driven reachability analysis. By using a transformer-based approach, we seek to enhance the representation of pedestrian trajectories and uncover characteristics or features that are subsequently used to group trajectories into different behavior clusters. We show that these behavior clusters can be used with data-driven reachability analysis, yielding an end-to-end data-driven approach to predicting the future motion of pedestrians. We train and evaluate our approach on a real pedestrian dataset, showcasing its effectiveness in forecasting pedestrian movements.
Read more8/29/2024