Enhancing Surface Neural Implicits with Curvature-Guided Sampling and Uncertainty-Augmented Representations

0
🧠
Sign in to get full access
Overview
- Neural implicit representations have become popular for modeling surfaces due to their adaptability and support for complex topology.
- Previous works have achieved good reconstruction quality but often do not discuss data acquisition or the impact of input quality and sampling methods.
- This paper introduces a method that directly uses depth images for high-fidelity 3D reconstruction.
- A simple sampling strategy is proposed to generate effective training data by incorporating differentiable geometric features from the input depth images.
- The method outperforms classical and learning-based baselines and demonstrates state-of-the-art results on synthetic and real-world datasets.
Plain English Explanation
Neural implicit representations are a way of modeling 3D surfaces that has become popular recently. These models are flexible and can handle complex shapes. Previous work has shown that these models can produce high-quality reconstructions, but they often don't talk about how the training data was collected or how the quality of the input data affects the reconstruction.
This paper introduces a new method that takes depth images (which show the distance of objects from the camera) and uses them directly to reconstruct 3D models. The key innovation is a simple way of generating training data that incorporates important geometric features from the depth images. This makes the training process more stable and efficient.
Despite its simplicity, this new method outperforms a range of other techniques, both traditional and machine learning-based, on both synthetic and real-world data. It demonstrates state-of-the-art results, meaning it produces 3D reconstructions that are better than the previous best.
Technical Explanation
The paper proposes a method for high-fidelity 3D reconstruction that directly uses depth images as input. To generate effective training data, the authors introduce a simple sampling strategy that incorporates differentiable geometric features computed directly from the input depth images. This allows the training process to be more stable and efficient compared to previous methods.
The authors evaluate their approach on both synthetic and real-world datasets, and show that it outperforms a range of classical and learning-based baselines. Key to the success of their method is the incorporation of the geometric features, which are calculated with only a marginal computational cost. This enables the model to better learn the relationship between the input depth images and the desired 3D reconstructions.
Despite the simplicity of the proposed sampling strategy, the method demonstrates state-of-the-art results, indicating that careful consideration of the training data and input quality can lead to significant improvements in neural implicit surface reconstruction.
Critical Analysis
The paper makes a compelling case for the importance of data quality and acquisition in neural implicit surface reconstruction. By directly using depth images as input and incorporating differentiable geometric features, the authors are able to produce high-fidelity 3D models that outperform a range of existing techniques.
One potential limitation of the work is that it focuses on a specific type of input data (depth images) and may not be as generalizable to other modalities, such as RGB images or point clouds. The authors acknowledge this and suggest that the sampling strategy could be extended to other input types.
Additionally, the paper does not provide a detailed analysis of the computational costs or runtime performance of the proposed method, which could be an important consideration for real-world applications. Further research could investigate the trade-offs between reconstruction quality and computational efficiency.
Overall, this paper makes a valuable contribution to the field of neural implicit surface reconstruction by highlighting the importance of data quality and sampling, and demonstrating the effectiveness of a simple yet powerful approach.
Conclusion
This paper introduces a novel method for high-fidelity 3D reconstruction that directly uses depth images as input. By proposing a simple yet effective sampling strategy that incorporates differentiable geometric features, the authors are able to produce state-of-the-art results that outperform a range of classical and learning-based baselines.
The key insights from this work are the importance of data quality and acquisition in neural implicit surface reconstruction, and the potential benefits of directly leveraging geometric information from the input data. These findings have important implications for the development of robust and efficient 3D reconstruction algorithms, which are crucial for a wide range of applications, from virtual reality to autonomous driving.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧠
0
Enhancing Surface Neural Implicits with Curvature-Guided Sampling and Uncertainty-Augmented Representations
Lu Sang, Abhishek Saroha, Maolin Gao, Daniel Cremers
Neural implicit representations have become a popular choice for modeling surfaces due to their adaptability in resolution and support for complex topology. While previous works have achieved impressive reconstruction quality by training on ground truth point clouds or meshes, they often do not discuss the data acquisition and ignore the effect of input quality and sampling methods during reconstruction. In this paper, we introduce a method that directly digests depth images for the task of high-fidelity 3D reconstruction. To this end, a simple sampling strategy is proposed to generate highly effective training data, by incorporating differentiable geometric features computed directly based on the input depth images with only marginal computational cost. Due to its simplicity, our sampling strategy can be easily incorporated into diverse popular methods, allowing their training process to be more stable and efficient. Despite its simplicity, our method outperforms a range of both classical and learning-based baselines and demonstrates state-of-the-art results in both synthetic and real-world datasets.
Read more8/12/2024
0
Normal-guided Detail-Preserving Neural Implicit Functions for High-Fidelity 3D Surface Reconstruction
Aarya Patel, Hamid Laga, Ojaswa Sharma
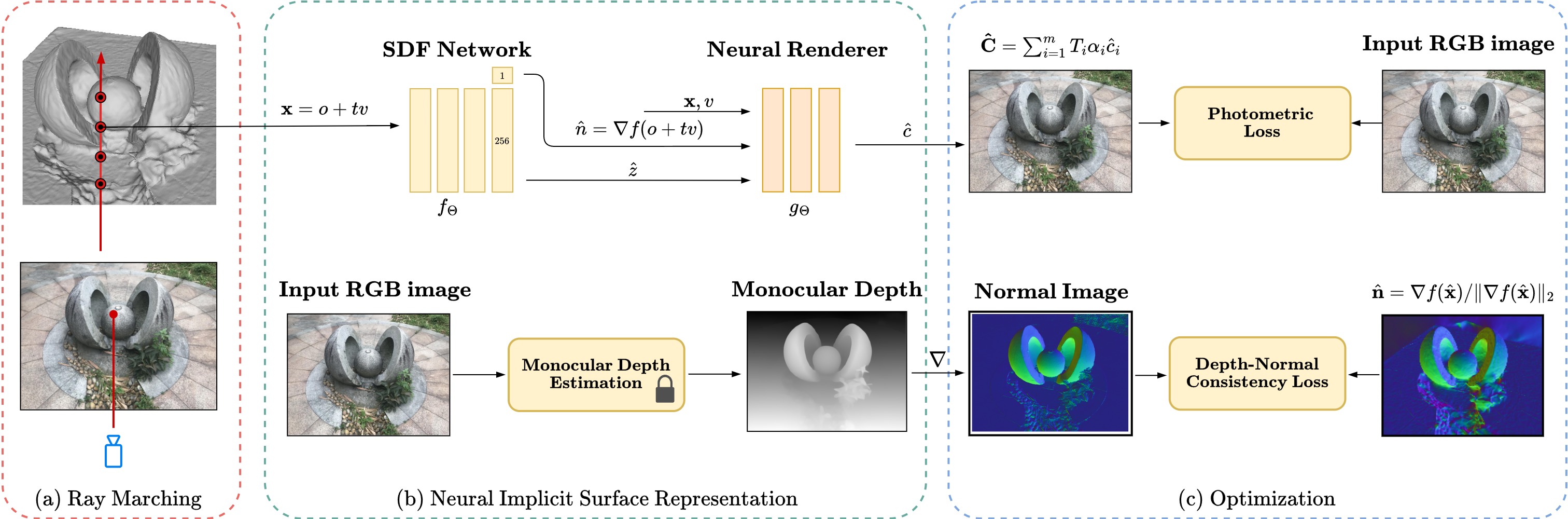
Neural implicit representations have emerged as a powerful paradigm for 3D reconstruction. However, despite their success, existing methods fail to capture fine geometric details and thin structures, especially in scenarios where only sparse RGB views of the objects of interest are available. We hypothesize that current methods for learning neural implicit representations from RGB or RGBD images produce 3D surfaces with missing parts and details because they only rely on 0-order differential properties, i.e. the 3D surface points and their projections, as supervisory signals. Such properties, however, do not capture the local 3D geometry around the points and also ignore the interactions between points. This paper demonstrates that training neural representations with first-order differential properties, i.e. surface normals, leads to highly accurate 3D surface reconstruction even in situations where only as few as two RGB (front and back) images are available. Given multiview RGB images of an object of interest, we first compute the approximate surface normals in the image space using the gradient of the depth maps produced using an off-the-shelf monocular depth estimator such as Depth Anything model. An implicit surface regressor is then trained using a loss function that enforces the first-order differential properties of the regressed surface to match those estimated from Depth Anything. Our extensive experiments on a wide range of real and synthetic datasets show that the proposed method achieves an unprecedented level of reconstruction accuracy even when using as few as two RGB views. The detailed ablation study also demonstrates that normal-based supervision plays a key role in this significant improvement in performance, enabling the 3D reconstruction of intricate geometric details and thin structures that were previously challenging to capture.
Read more6/10/2024

0
3QFP: Efficient neural implicit surface reconstruction using Tri-Quadtrees and Fourier feature Positional encoding
Shuo Sun, Malcolm Mielle, Achim J. Lilienthal, Martin Magnusson
Neural implicit surface representations are currently receiving a lot of interest as a means to achieve high-fidelity surface reconstruction at a low memory cost, compared to traditional explicit representations.However, state-of-the-art methods still struggle with excessive memory usage and non-smooth surfaces. This is particularly problematic in large-scale applications with sparse inputs, as is common in robotics use cases. To address these issues, we first introduce a sparse structure, emph{tri-quadtrees}, which represents the environment using learnable features stored in three planar quadtree projections. Secondly, we concatenate the learnable features with a Fourier feature positional encoding. The combined features are then decoded into signed distance values through a small multi-layer perceptron. We demonstrate that this approach facilitates smoother reconstruction with a higher completion ratio with fewer holes. Compared to two recent baselines, one implicit and one explicit, our approach requires only 10%--50% as much memory, while achieving competitive quality.
Read more4/9/2024

0
Parameterization-driven Neural Surface Reconstruction for Object-oriented Editing in Neural Rendering
Baixin Xu, Jiangbei Hu, Fei Hou, Kwan-Yee Lin, Wayne Wu, Chen Qian, Ying He
The advancements in neural rendering have increased the need for techniques that enable intuitive editing of 3D objects represented as neural implicit surfaces. This paper introduces a novel neural algorithm for parameterizing neural implicit surfaces to simple parametric domains like spheres and polycubes. Our method allows users to specify the number of cubes in the parametric domain, learning a configuration that closely resembles the target 3D object's geometry. It computes bi-directional deformation between the object and the domain using a forward mapping from the object's zero level set and an inverse deformation for backward mapping. We ensure nearly bijective mapping with a cycle loss and optimize deformation smoothness. The parameterization quality, assessed by angle and area distortions, is guaranteed using a Laplacian regularizer and an optimized learned parametric domain. Our framework integrates with existing neural rendering pipelines, using multi-view images of a single object or multiple objects of similar geometries to reconstruct 3D geometry and compute texture maps automatically, eliminating the need for any prior information. We demonstrate the method's effectiveness on images of human heads and man-made objects.
Read more7/16/2024