Enhancing Vectorized Map Perception with Historical Rasterized Maps

0
Sign in to get full access
Overview
- Enhances vectorized map perception by incorporating historical rasterized maps
- Aims to improve autonomous driving and bird's-eye-view applications
- Explores how historical map data can benefit vectorized map understanding
Plain English Explanation
This research paper explores how incorporating historical rasterized map data can enhance the perception of vectorized maps. Vectorized maps are digital representations of maps that use geometric shapes and lines to encode information, whereas rasterized maps are image-based representations.
The researchers hypothesize that historical rasterized map data can provide valuable context and information that can improve the understanding of vectorized maps. For example, older maps may contain details about road layouts or land use that are no longer present in current vectorized maps, but could still be useful for autonomous driving or bird's-eye-view applications.
By leveraging this historical information, the researchers aim to improve the accuracy and robustness of vectorized map perception, which is a critical component of autonomous driving and other spatial applications.
Technical Explanation
The paper proposes a novel approach to enhance vectorized map perception by incorporating historical rasterized maps. The key components of their methodology include:
-
Retrieving historical rasterized maps: The researchers develop a system to efficiently retrieve and align historical rasterized maps with the current vectorized map data.
-
Fusing vectorized and rasterized map data: They design a deep learning-based architecture that can integrate the complementary information from vectorized and rasterized maps to improve map perception.
-
Leveraging enhanced map queries: The researchers demonstrate how the fused map data can be used to enhance the performance of downstream tasks, such as querying the map for specific features or objects.
The experiments conducted in the paper show that their approach can significantly improve the accuracy and robustness of vectorized map perception, especially in scenarios where the current vectorized maps may be incomplete or outdated.
Critical Analysis
The paper presents a promising approach to enhancing vectorized map perception, but there are a few potential limitations and areas for further research:
-
Real-world map change generalization: The researchers note that their approach may struggle to generalize to real-world map changes, such as the construction of new roads or buildings. Exploring ways to better handle these dynamic changes would be an important area for future work.
-
Scalability and efficiency: The proposed approach requires the efficient retrieval and alignment of historical rasterized maps, which could be computationally intensive, especially for large-scale applications. Investigating ways to improve the scalability and efficiency of the system would be beneficial.
-
Interpretability and explainability: While the deep learning-based fusion architecture is effective, the lack of interpretability and explainability of the model's decision-making process could be a concern, especially for safety-critical applications like autonomous driving. Exploring ways to improve the model's interpretability would be a valuable area for future research.
Overall, the paper presents an innovative approach to enhancing vectorized map perception and demonstrates promising results. However, addressing the identified limitations and further exploring the practical implications of this research could lead to significant advancements in autonomous driving and other spatial applications.
Conclusion
The research paper "Enhancing Vectorized Map Perception with Historical Rasterized Maps" proposes a novel method to improve the understanding of vectorized maps by incorporating historical rasterized map data. The key contribution of this work is the demonstration of how complementary information from different map representations can be effectively fused to enhance the accuracy and robustness of vectorized map perception.
The findings of this research have the potential to significantly impact autonomous driving and other bird's-eye-view applications, where accurate and up-to-date map information is critical. By leveraging historical map data, the proposed approach can provide valuable context and insights that can improve the performance of downstream tasks, such as object detection, localization, and navigation.
While the paper presents a promising solution, further research is needed to address the identified limitations, such as improving the scalability and interpretability of the system, as well as exploring its generalization to real-world map changes. Nonetheless, this work represents an important step forward in enhancing the perception capabilities of vectorized maps, which could ultimately lead to safer and more efficient autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Enhancing Vectorized Map Perception with Historical Rasterized Maps
Xiaoyu Zhang, Guangwei Liu, Zihao Liu, Ningyi Xu, Yunhui Liu, Ji Zhao
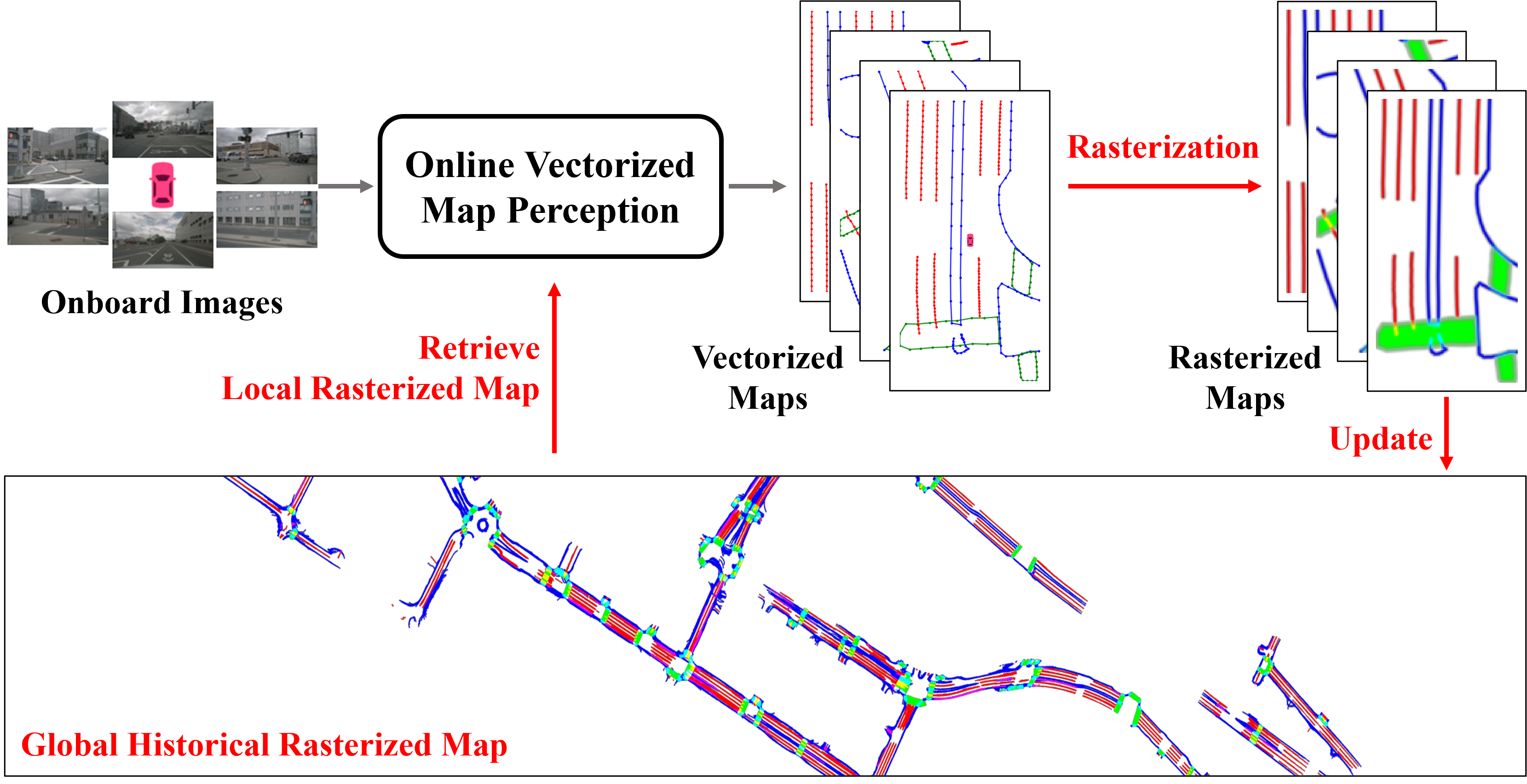
In autonomous driving, there is growing interest in end-to-end online vectorized map perception in bird's-eye-view (BEV) space, with an expectation that it could replace traditional high-cost offline high-definition (HD) maps. However, the accuracy and robustness of these methods can be easily compromised in challenging conditions, such as occlusion or adverse weather, when relying only on onboard sensors. In this paper, we propose HRMapNet, leveraging a low-cost Historical Rasterized Map to enhance online vectorized map perception. The historical rasterized map can be easily constructed from past predicted vectorized results and provides valuable complementary information. To fully exploit a historical map, we propose two novel modules to enhance BEV features and map element queries. For BEV features, we employ a feature aggregation module to encode features from both onboard images and the historical map. For map element queries, we design a query initialization module to endow queries with priors from the historical map. The two modules contribute to leveraging map information in online perception. Our HRMapNet can be integrated with most online vectorized map perception methods. We integrate it in two state-of-the-art methods, significantly improving their performance on both the nuScenes and Argoverse 2 datasets. The source code is released at https://github.com/HXMap/HRMapNet.
Read more9/4/2024

0
Online Temporal Fusion for Vectorized Map Construction in Mapless Autonomous Driving
Jiagang Chen, Liangliang Pan, Shunping Ji, Ji Zhao, Zichao Zhang
To reduce the reliance on high-definition (HD) maps, a growing trend in autonomous driving is leveraging on-board sensors to generate vectorized maps online. However, current methods are mostly constrained by processing only single-frame inputs, which hampers their robustness and effectiveness in complex scenarios. To overcome this problem, we propose an online map construction system that exploits the long-term temporal information to build a consistent vectorized map. First, the system efficiently fuses all historical road marking detections from an off-the-shelf network into a semantic voxel map, which is implemented using a hashing-based strategy to exploit the sparsity of road elements. Then reliable voxels are found by examining the fused information and incrementally clustered into an instance-level representation of road markings. Finally, the system incorporates domain knowledge to estimate the geometric and topological structures of roads, which can be directly consumed by the planning and control (PnC) module. Through experiments conducted in complicated urban environments, we have demonstrated that the output of our system is more consistent and accurate than the network output by a large margin and can be effectively used in a closed-loop autonomous driving system.
Read more9/4/2024

0
Accelerating Online Mapping and Behavior Prediction via Direct BEV Feature Attention
Xunjiang Gu, Guanyu Song, Igor Gilitschenski, Marco Pavone, Boris Ivanovic
Understanding road geometry is a critical component of the autonomous vehicle (AV) stack. While high-definition (HD) maps can readily provide such information, they suffer from high labeling and maintenance costs. Accordingly, many recent works have proposed methods for estimating HD maps online from sensor data. The vast majority of recent approaches encode multi-camera observations into an intermediate representation, e.g., a bird's eye view (BEV) grid, and produce vector map elements via a decoder. While this architecture is performant, it decimates much of the information encoded in the intermediate representation, preventing downstream tasks (e.g., behavior prediction) from leveraging them. In this work, we propose exposing the rich internal features of online map estimation methods and show how they enable more tightly integrating online mapping with trajectory forecasting. In doing so, we find that directly accessing internal BEV features yields up to 73% faster inference speeds and up to 29% more accurate predictions on the real-world nuScenes dataset.
Read more7/10/2024

0
Neural HD Map Generation from Multiple Vectorized Tiles Locally Produced by Autonomous Vehicles
Miao Fan, Yi Yao, Jianping Zhang, Xiangbo Song, Daihui Wu
High-definition (HD) map is a fundamental component of autonomous driving systems, as it can provide precise environmental information about driving scenes. Recent work on vectorized map generation could produce merely 65% local map elements around the ego-vehicle at runtime by one tour with onboard sensors, leaving a puzzle of how to construct a global HD map projected in the world coordinate system under high-quality standards. To address the issue, we present GNMap as an end-to-end generative neural network to automatically construct HD maps with multiple vectorized tiles which are locally produced by autonomous vehicles through several tours. It leverages a multi-layer and attention-based autoencoder as the shared network, of which parameters are learned from two different tasks (i.e., pretraining and finetuning, respectively) to ensure both the completeness of generated maps and the correctness of element categories. Abundant qualitative evaluations are conducted on a real-world dataset and experimental results show that GNMap can surpass the SOTA method by more than 5% F1 score, reaching the level of industrial usage with a small amount of manual modification. We have already deployed it at Navinfo Co., Ltd., serving as an indispensable software to automatically build HD maps for autonomous driving systems.
Read more9/6/2024