Online Temporal Fusion for Vectorized Map Construction in Mapless Autonomous Driving

0

Sign in to get full access
Overview
- Autonomous driving requires accurate and up-to-date maps of the environment.
- This paper presents a method for constructing vectorized maps in real-time using online temporal fusion.
- The approach combines data from multiple sensors to create a bird's-eye view representation of the surrounding environment.
- Key techniques used include voxel hashing and online mapping, enabling efficient and scalable map construction.
Plain English Explanation
The paper discusses a method for building maps in real-time to help autonomous vehicles navigate without relying on pre-existing maps. The researchers developed a system that can combine information from different sensors over time to create a detailed 3D model of the vehicle's surroundings.
This "bird's-eye view" representation allows the autonomous car to understand its environment and make informed decisions about how to proceed. The key innovations are the use of voxel hashing, which helps the system efficiently manage the large amounts of data involved, and online mapping, which allows the map to be continuously updated as the vehicle moves.
Overall, this research aims to enable autonomous cars to navigate safely and effectively without needing to rely on pre-made maps, which can quickly become outdated. By fusing data from multiple sensors in real-time, the system can build a detailed, up-to-date representation of the vehicle's surroundings to support its decision-making.
Technical Explanation
The paper presents a method for online temporal fusion to construct vectorized maps for mapless autonomous driving. The approach combines data from multiple sensors, including cameras, lidars, and radars, to create a bird's-eye view representation of the environment.
Key elements of the system include:
- Voxel hashing: A data structure used to efficiently manage the large amount of 3D sensor data involved in mapping the environment.
- Online mapping: The ability to continuously update the map as the vehicle moves, rather than relying on a static pre-built map.
- Temporal fusion: Combining sensor data over time to gradually build a more complete and accurate representation of the surroundings.
Through experiments, the researchers demonstrate that their approach can construct high-quality vectorized maps in real-time, supporting the navigation and decision-making of autonomous vehicles.
Critical Analysis
The paper presents a compelling approach to the important challenge of creating maps for autonomous driving. By fusing sensor data over time and using efficient data structures, the system can build detailed maps without relying on pre-existing information.
One potential limitation is the reliance on multiple sensors, which may increase the cost and complexity of the system. Additionally, the paper does not address how the approach would handle dynamic environments with moving objects, which is a key challenge for autonomous driving.
Further research could explore ways to reduce sensor requirements, such as by leveraging historical map data or behavior prediction to supplement the online mapping. Integrating the mapping system with semantic understanding could also enhance its capabilities.
Overall, this research represents an important step forward in enabling autonomous vehicles to navigate safely and effectively without relying on pre-built maps, which can quickly become outdated. Continued advancements in this area have the potential to significantly improve the reliability and accessibility of self-driving technology.
Conclusion
This paper presents a novel approach for constructing vectorized maps in real-time to support mapless autonomous driving. By fusing data from multiple sensors using techniques like voxel hashing and online mapping, the system can build detailed, up-to-date representations of the vehicle's surroundings.
The ability to continuously update the map as the vehicle moves is a key innovation, allowing autonomous cars to navigate safely and effectively without relying on pre-existing map data. While the current system has some limitations, the research represents an important step forward in enabling autonomous vehicles to operate reliably in dynamic, unstructured environments.
Future advancements in areas like sensor fusion, semantic understanding, and behavior prediction could further enhance the capabilities of such online mapping systems, ultimately paving the way for more accessible and widespread adoption of self-driving technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Online Temporal Fusion for Vectorized Map Construction in Mapless Autonomous Driving
Jiagang Chen, Liangliang Pan, Shunping Ji, Ji Zhao, Zichao Zhang
To reduce the reliance on high-definition (HD) maps, a growing trend in autonomous driving is leveraging on-board sensors to generate vectorized maps online. However, current methods are mostly constrained by processing only single-frame inputs, which hampers their robustness and effectiveness in complex scenarios. To overcome this problem, we propose an online map construction system that exploits the long-term temporal information to build a consistent vectorized map. First, the system efficiently fuses all historical road marking detections from an off-the-shelf network into a semantic voxel map, which is implemented using a hashing-based strategy to exploit the sparsity of road elements. Then reliable voxels are found by examining the fused information and incrementally clustered into an instance-level representation of road markings. Finally, the system incorporates domain knowledge to estimate the geometric and topological structures of roads, which can be directly consumed by the planning and control (PnC) module. Through experiments conducted in complicated urban environments, we have demonstrated that the output of our system is more consistent and accurate than the network output by a large margin and can be effectively used in a closed-loop autonomous driving system.
Read more9/4/2024

0
LGmap: Local-to-Global Mapping Network for Online Long-Range Vectorized HD Map Construction
Kuang Wu, Sulei Nian, Can Shen, Chuan Yang, Zhanbin Li
This report introduces the first-place winning solution for the Autonomous Grand Challenge 2024 - Mapless Driving. In this report, we introduce a novel online mapping pipeline LGmap, which adept at long-range temporal model. Firstly, we propose symmetric view transformation(SVT), a hybrid view transformation module. Our approach overcomes the limitations of forward sparse feature representation and utilizing depth perception and SD prior information. Secondly, we propose hierarchical temporal fusion(HTF) module. It employs temporal information from local to global, which empowers the construction of long-range HD map with high stability. Lastly, we propose a novel ped-crossing resampling. The simplified ped crossing representation accelerates the instance attention based decoder convergence performance. Our method achieves 0.66 UniScore in the Mapless Driving OpenLaneV2 test set.
Read more6/21/2024

0
New!GlobalMapNet: An Online Framework for Vectorized Global HD Map Construction
Anqi Shi, Yuze Cai, Xiangyu Chen, Jian Pu, Zeyu Fu, Hong Lu
High-definition (HD) maps are essential for autonomous driving systems. Traditionally, an expensive and labor-intensive pipeline is implemented to construct HD maps, which is limited in scalability. In recent years, crowdsourcing and online mapping have emerged as two alternative methods, but they have limitations respectively. In this paper, we provide a novel methodology, namely global map construction, to perform direct generation of vectorized global maps, combining the benefits of crowdsourcing and online mapping. We introduce GlobalMapNet, the first online framework for vectorized global HD map construction, which updates and utilizes a global map on the ego vehicle. To generate the global map from scratch, we propose GlobalMapBuilder to match and merge local maps continuously. We design a new algorithm, Map NMS, to remove duplicate map elements and produce a clean map. We also propose GlobalMapFusion to aggregate historical map information, improving consistency of prediction. We examine GlobalMapNet on two widely recognized datasets, Argoverse2 and nuScenes, showing that our framework is capable of generating globally consistent results.
Read more9/18/2024
0
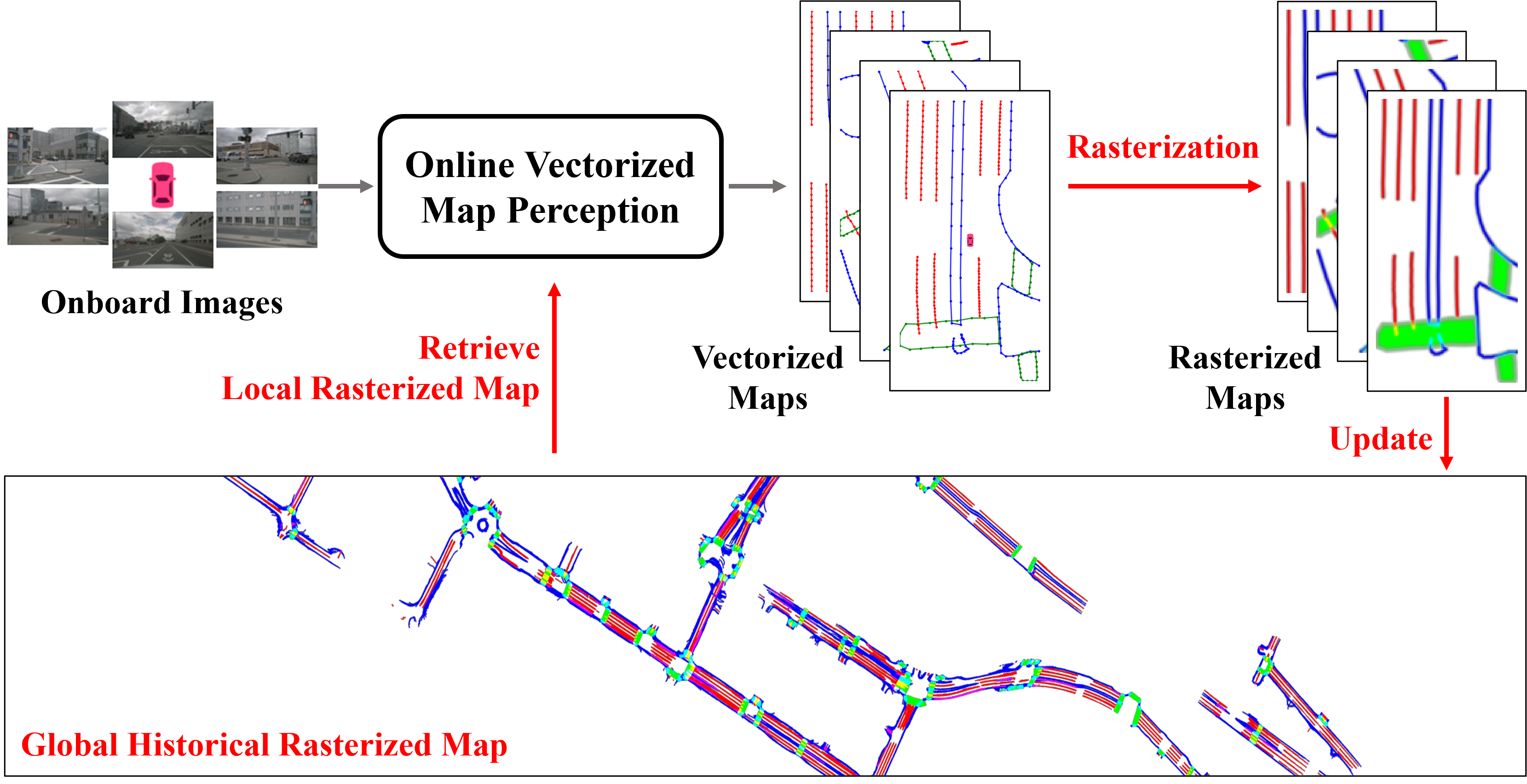
Enhancing Vectorized Map Perception with Historical Rasterized Maps
Xiaoyu Zhang, Guangwei Liu, Zihao Liu, Ningyi Xu, Yunhui Liu, Ji Zhao
In autonomous driving, there is growing interest in end-to-end online vectorized map perception in bird's-eye-view (BEV) space, with an expectation that it could replace traditional high-cost offline high-definition (HD) maps. However, the accuracy and robustness of these methods can be easily compromised in challenging conditions, such as occlusion or adverse weather, when relying only on onboard sensors. In this paper, we propose HRMapNet, leveraging a low-cost Historical Rasterized Map to enhance online vectorized map perception. The historical rasterized map can be easily constructed from past predicted vectorized results and provides valuable complementary information. To fully exploit a historical map, we propose two novel modules to enhance BEV features and map element queries. For BEV features, we employ a feature aggregation module to encode features from both onboard images and the historical map. For map element queries, we design a query initialization module to endow queries with priors from the historical map. The two modules contribute to leveraging map information in online perception. Our HRMapNet can be integrated with most online vectorized map perception methods. We integrate it in two state-of-the-art methods, significantly improving their performance on both the nuScenes and Argoverse 2 datasets. The source code is released at https://github.com/HXMap/HRMapNet.
Read more9/4/2024