Leveraging Enhanced Queries of Point Sets for Vectorized Map Construction

0

Sign in to get full access
Overview
- The paper presents a novel approach for constructing vectorized maps from point cloud data.
- The key innovation is the use of "enhanced queries" to efficiently extract relevant information from the point set.
- The proposed method can generate high-quality vector maps in real-time, making it suitable for autonomous navigation applications.
Plain English Explanation
The paper describes a new way to create detailed digital maps from 3D sensor data, like what self-driving cars use to "see" the world around them. Traditional map-making methods have struggled to keep up with the rapidly changing environment, but this new approach uses "enhanced queries" to quickly extract just the most important information from the 3D data.
This allows the system to build high-quality vector maps - maps made up of lines and shapes instead of millions of individual points - in real-time. This is a big advantage for autonomous vehicles that need to constantly update their understanding of the roads and surroundings as they drive.
Technical Explanation
The core innovation in this paper is the use of enhanced queries to efficiently extract relevant geometric features from the input point cloud data. Rather than processing the entire point set, the enhanced queries allow the system to focus on just the most important elements needed to construct an accurate vector map.
This improved query efficiency, combined with a novel vectorization algorithm, enables the system to generate high-quality vector maps in real-time, without the need for offline processing or batch updates. The authors demonstrate the effectiveness of their approach through extensive experiments, showing significant performance improvements over baseline methods.
Critical Analysis
The paper presents a compelling solution to the challenge of online vectorized HD map construction, which is a crucial capability for autonomous navigation systems. The use of enhanced queries to selectively process the point cloud data is a clever approach that seems to unlock substantial efficiency gains.
However, the paper does not address potential limitations or edge cases, such as how the system might handle highly dynamic environments or sensor failures. Additionally, while the experimental results are strong, further work may be needed to validate the approach on a wider range of real-world scenarios.
Conclusion
Overall, this paper presents an innovative method for constructing high-quality vector maps from point cloud data in real-time. The key insight of leveraging enhanced queries to optimize the map construction process is a significant contribution that could have important implications for the development of robust and responsive autonomous navigation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Leveraging Enhanced Queries of Point Sets for Vectorized Map Construction
Zihao Liu, Xiaoyu Zhang, Guangwei Liu, Ji Zhao, Ningyi Xu
In autonomous driving, the high-definition (HD) map plays a crucial role in localization and planning. Recently, several methods have facilitated end-to-end online map construction in DETR-like frameworks. However, little attention has been paid to the potential capabilities of exploring the query mechanism for map elements. This paper introduces MapQR, an end-to-end method with an emphasis on enhancing query capabilities for constructing online vectorized maps. To probe desirable information efficiently, MapQR utilizes a novel query design, called scatter-and-gather query, which is modelled by separate content and position parts explicitly. The base map instance queries are scattered to different reference points and added with positional embeddings to probe information from BEV features. Then these scatted queries are gathered back to enhance information within each map instance. Together with a simple and effective improvement of a BEV encoder, the proposed MapQR achieves the best mean average precision (mAP) and maintains good efficiency on both nuScenes and Argoverse 2. In addition, integrating our query design into other models can boost their performance significantly. The source code is available at https://github.com/HXMap/MapQR.
Read more7/24/2024
0
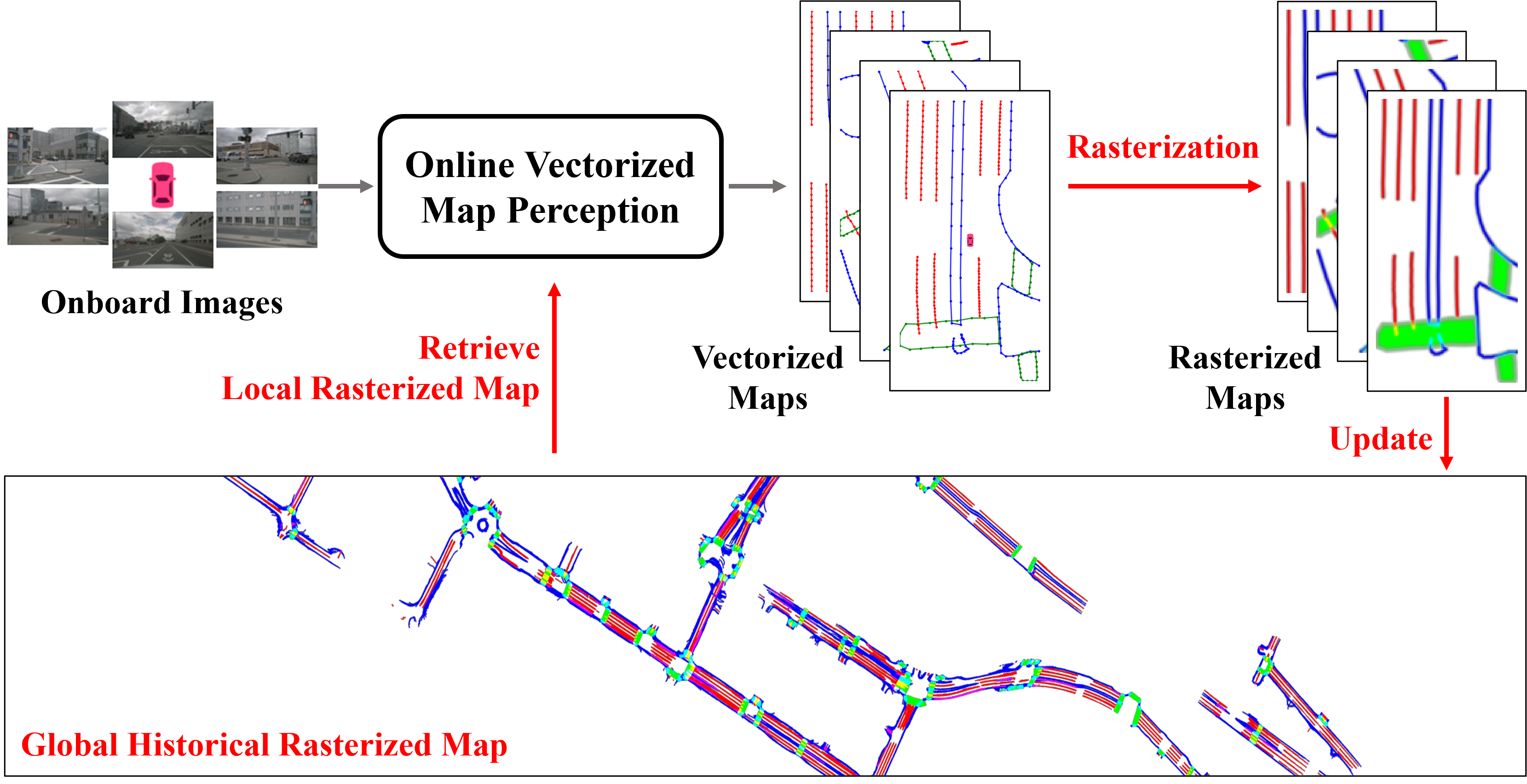
Enhancing Vectorized Map Perception with Historical Rasterized Maps
Xiaoyu Zhang, Guangwei Liu, Zihao Liu, Ningyi Xu, Yunhui Liu, Ji Zhao
In autonomous driving, there is growing interest in end-to-end online vectorized map perception in bird's-eye-view (BEV) space, with an expectation that it could replace traditional high-cost offline high-definition (HD) maps. However, the accuracy and robustness of these methods can be easily compromised in challenging conditions, such as occlusion or adverse weather, when relying only on onboard sensors. In this paper, we propose HRMapNet, leveraging a low-cost Historical Rasterized Map to enhance online vectorized map perception. The historical rasterized map can be easily constructed from past predicted vectorized results and provides valuable complementary information. To fully exploit a historical map, we propose two novel modules to enhance BEV features and map element queries. For BEV features, we employ a feature aggregation module to encode features from both onboard images and the historical map. For map element queries, we design a query initialization module to endow queries with priors from the historical map. The two modules contribute to leveraging map information in online perception. Our HRMapNet can be integrated with most online vectorized map perception methods. We integrate it in two state-of-the-art methods, significantly improving their performance on both the nuScenes and Argoverse 2 datasets. The source code is released at https://github.com/HXMap/HRMapNet.
Read more9/4/2024

0
Online Temporal Fusion for Vectorized Map Construction in Mapless Autonomous Driving
Jiagang Chen, Liangliang Pan, Shunping Ji, Ji Zhao, Zichao Zhang
To reduce the reliance on high-definition (HD) maps, a growing trend in autonomous driving is leveraging on-board sensors to generate vectorized maps online. However, current methods are mostly constrained by processing only single-frame inputs, which hampers their robustness and effectiveness in complex scenarios. To overcome this problem, we propose an online map construction system that exploits the long-term temporal information to build a consistent vectorized map. First, the system efficiently fuses all historical road marking detections from an off-the-shelf network into a semantic voxel map, which is implemented using a hashing-based strategy to exploit the sparsity of road elements. Then reliable voxels are found by examining the fused information and incrementally clustered into an instance-level representation of road markings. Finally, the system incorporates domain knowledge to estimate the geometric and topological structures of roads, which can be directly consumed by the planning and control (PnC) module. Through experiments conducted in complicated urban environments, we have demonstrated that the output of our system is more consistent and accurate than the network output by a large margin and can be effectively used in a closed-loop autonomous driving system.
Read more9/4/2024

0
Online Vectorized HD Map Construction using Geometry
Zhixin Zhang, Yiyuan Zhang, Xiaohan Ding, Fusheng Jin, Xiangyu Yue
The construction of online vectorized High-Definition (HD) maps is critical for downstream prediction and planning. Recent efforts have built strong baselines for this task, however, shapes and relations of instances in urban road systems are still under-explored, such as parallelism, perpendicular, or rectangle-shape. In our work, we propose GeMap ($textbf{Ge}$ometry $textbf{Map}$), which end-to-end learns Euclidean shapes and relations of map instances beyond basic perception. Specifically, we design a geometric loss based on angle and distance clues, which is robust to rigid transformations. We also decouple self-attention to independently handle Euclidean shapes and relations. Our method achieves new state-of-the-art performance on the NuScenes and Argoverse 2 datasets. Remarkably, it reaches a 71.8% mAP on the large-scale Argoverse 2 dataset, outperforming MapTR V2 by +4.4% and surpassing the 70% mAP threshold for the first time. Code is available at https://github.com/cnzzx/GeMap.
Read more7/11/2024