Epicardium Prompt-guided Real-time Cardiac Ultrasound Frame-to-volume Registration

0
Sign in to get full access
Overview
- This paper presents a method for real-time registration of cardiac ultrasound frames to a pre-acquired 3D ultrasound volume, guided by a prompt-based model that identifies the epicardial (outer heart) surface.
- The approach aims to assist cardiac interventional surgeons by providing accurate real-time visualization of the heart's structure and motion during procedures.
- The method uses deep learning to predict the epicardial surface from each ultrasound frame, which is then used to guide the registration of that frame to the 3D volume.
Plain English Explanation
During cardiac procedures, surgeons often use real-time ultrasound imaging to guide their work and monitor the heart's structure and movement. Transformer-based Local Feature Matching for Multimodal Image Registration can help by automatically aligning the live ultrasound images with a pre-recorded 3D model of the patient's heart.
The key innovation in this paper is the use of a "prompt-guided" deep learning model. This model can look at each individual 2D ultrasound frame and identify the outer surface of the heart, called the epicardium. By knowing the location of the epicardium, the system can then figure out how to best fit that 2D frame into the 3D heart model, providing the surgeon with a more accurate real-time visualization.
This is similar to how RapidVol: Rapid Reconstruction of 3D Ultrasound Volumes from 2D Sweeps uses deep learning to reconstruct a 3D volume from a series of 2D ultrasound images. But in this case, the focus is on aligning each individual 2D frame to the pre-existing 3D model, rather than building the 3D model from scratch.
The hope is that by giving surgeons a more detailed, accurate view of the heart during procedures, this technology can help improve outcomes for patients undergoing cardiac interventions.
Technical Explanation
The proposed method uses a deep learning model to predict the epicardial surface from each 2D ultrasound frame. This epicardial prediction is then used as a "prompt" to guide the registration of that frame to the pre-acquired 3D ultrasound volume.
The deep learning model is based on a Prompt-Driven Universal Model for View-Agnostic Echocardiography, which is trained to segment the epicardium from various viewpoints. By focusing on the epicardium, the system can robustly align the 2D frames to the 3D volume, even as the probe position changes during the procedure.
The registration process itself uses a variation of the Cardiac CoPilot: Automatic Probe Guidance for Echocardiography in the Wild algorithm, which aligns the 2D frame to the 3D volume by optimizing the position and orientation of the frame to maximize the overlap with the predicted epicardial surface.
Experiments on a dataset of cardiac interventional procedures showed that this approach can provide accurate real-time registration, with mean registration errors below 5mm. The method also demonstrated robustness to variations in probe positioning and imaging quality.
Critical Analysis
One potential limitation of this approach is its reliance on having a pre-acquired 3D ultrasound volume of the patient's heart. In some cases, this 3D volume may not be available, or it may not accurately represent the patient's current cardiac state. The authors acknowledge this and suggest that future work could explore methods for building the 3D model directly from the live 2D frames, similar to RapidVol.
Additionally, the performance of the system may be affected by factors such as image quality, patient anatomy, and the surgeon's technique in manipulating the ultrasound probe. Further research is needed to fully understand the limitations and generalizability of the proposed approach, especially in diverse real-world clinical settings.
It would also be valuable to evaluate the impact of this technology on surgical outcomes and patient care. While the technical implementation appears promising, the ultimate test will be whether it meaningfully improves the surgeon's ability to visualize and navigate the cardiac anatomy during interventions, and whether this translates to better patient results.
Conclusion
This paper presents a novel approach for real-time registration of cardiac ultrasound frames to a pre-acquired 3D volume, guided by a deep learning model's prediction of the epicardial surface. By providing surgeons with an accurate, dynamic visualization of the heart during interventional procedures, this technology has the potential to enhance surgical precision and ultimately improve outcomes for patients undergoing cardiac treatments.
The use of prompt-guided deep learning to enable robust, view-agnostic registration is a promising step forward in the field of Class-Aware Cartilage Segmentation for Autonomous US-CT fusion. As this technology continues to evolve, it may become an invaluable tool in the cardiac surgeon's arsenal, helping to push the boundaries of what is possible in the operating room.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Epicardium Prompt-guided Real-time Cardiac Ultrasound Frame-to-volume Registration
Long Lei, Jun Zhou, Jialun Pei, Baoliang Zhao, Yueming Jin, Yuen-Chun Jeremy Teoh, Jing Qin, Pheng-Ann Heng
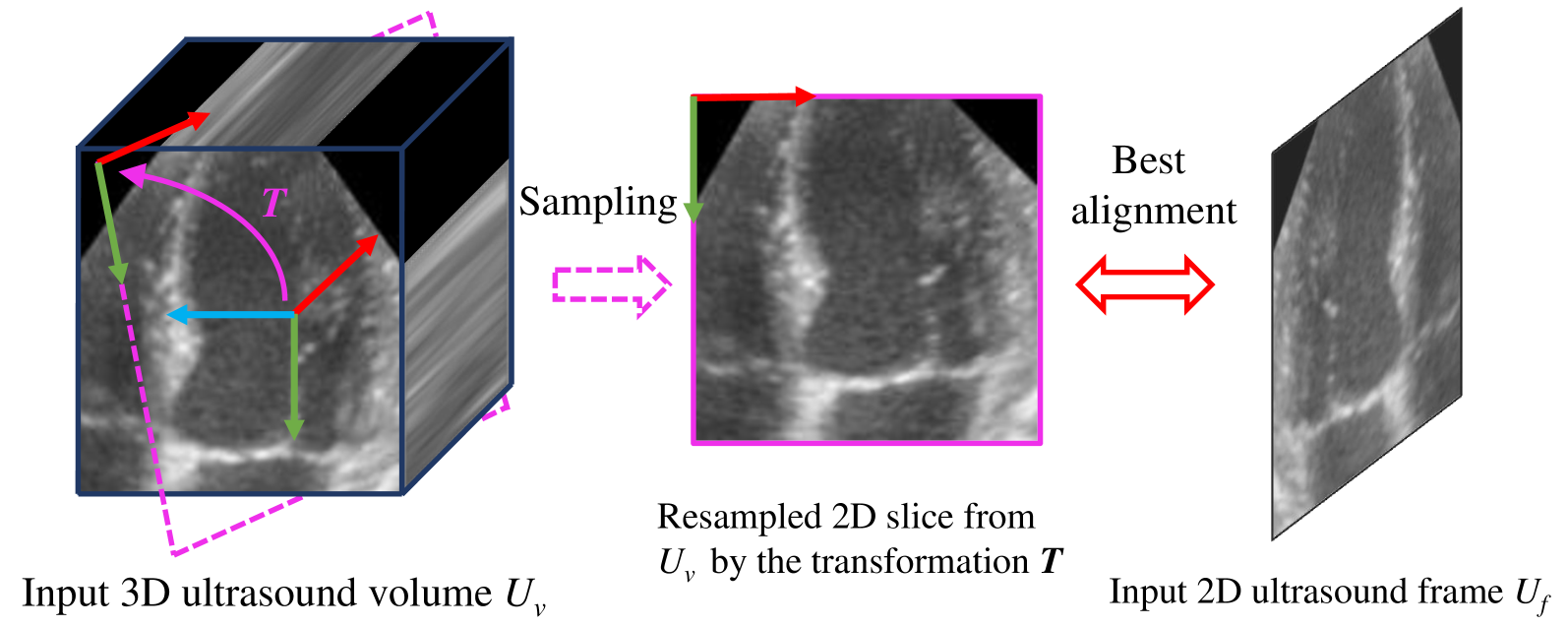
A comprehensive guidance view for cardiac interventional surgery can be provided by the real-time fusion of the intraoperative 2D images and preoperative 3D volume based on the ultrasound frame-to-volume registration. However, cardiac ultrasound images are characterized by a low signal-to-noise ratio and small differences between adjacent frames, coupled with significant dimension variations between 2D frames and 3D volumes to be registered, resulting in real-time and accurate cardiac ultrasound frame-to-volume registration being a very challenging task. This paper introduces a lightweight end-to-end Cardiac Ultrasound frame-to-volume Registration network, termed CU-Reg. Specifically, the proposed model leverages epicardium prompt-guided anatomical clues to reinforce the interaction of 2D sparse and 3D dense features, followed by a voxel-wise local-global aggregation of enhanced features, thereby boosting the cross-dimensional matching effectiveness of low-quality ultrasound modalities. We further embed an inter-frame discriminative regularization term within the hybrid supervised learning to increase the distinction between adjacent slices in the same ultrasound volume to ensure registration stability. Experimental results on the reprocessed CAMUS dataset demonstrate that our CU-Reg surpasses existing methods in terms of registration accuracy and efficiency, meeting the guidance requirements of clinical cardiac interventional surgery.
Read more7/1/2024
0
Transformer-Based Local Feature Matching for Multimodal Image Registration
Remi Delaunay, Ruisi Zhang, Filipe C. Pedrosa, Navid Feizi, Dianne Sacco, Rajni Patel, Jayender Jagadeesan
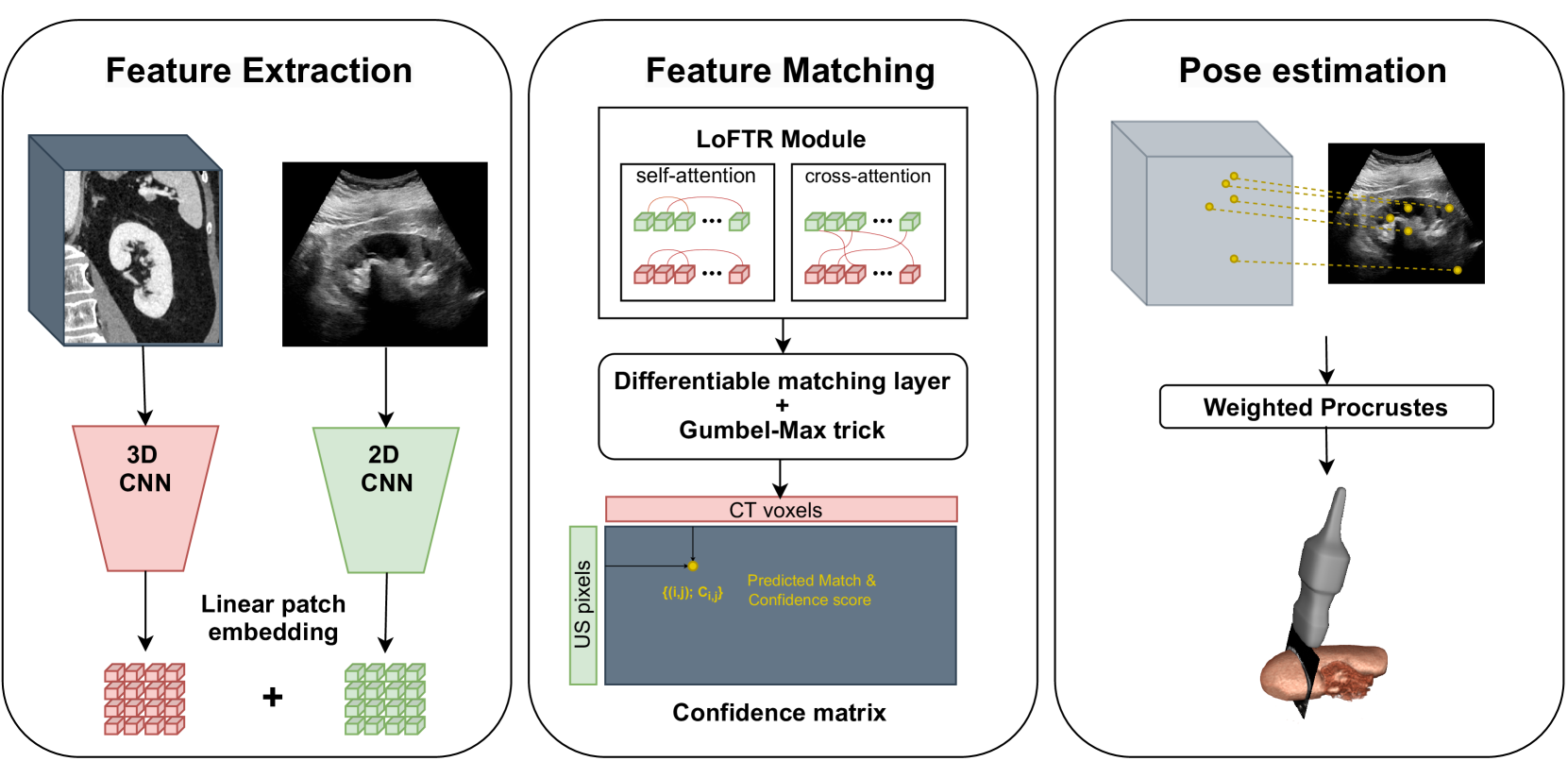
Ultrasound imaging is a cost-effective and radiation-free modality for visualizing anatomical structures in real-time, making it ideal for guiding surgical interventions. However, its limited field-of-view, speckle noise, and imaging artifacts make it difficult to interpret the images for inexperienced users. In this paper, we propose a new 2D ultrasound to 3D CT registration method to improve surgical guidance during ultrasound-guided interventions. Our approach adopts a dense feature matching method called LoFTR to our multimodal registration problem. We learn to predict dense coarse-to-fine correspondences using a Transformer-based architecture to estimate a robust rigid transformation between a 2D ultrasound frame and a CT scan. Additionally, a fully differentiable pose estimation method is introduced, optimizing LoFTR on pose estimation error during training. Experiments conducted on a multimodal dataset of ex vivo porcine kidneys demonstrate the method's promising results for intraoperative, trackerless ultrasound pose estimation. By mapping 2D ultrasound frames into the 3D CT volume space, the method provides intraoperative guidance, potentially improving surgical workflows and image interpretation.
Read more4/26/2024

0
RapidVol: Rapid Reconstruction of 3D Ultrasound Volumes from Sensorless 2D Scans
Mark C. Eid, Pak-Hei Yeung, Madeleine K. Wyburd, Jo~ao F. Henriques, Ana I. L. Namburete
Two-dimensional (2D) freehand ultrasonography is one of the most commonly used medical imaging modalities, particularly in obstetrics and gynaecology. However, it only captures 2D cross-sectional views of inherently 3D anatomies, losing valuable contextual information. As an alternative to requiring costly and complex 3D ultrasound scanners, 3D volumes can be constructed from 2D scans using machine learning. However this usually requires long computational time. Here, we propose RapidVol: a neural representation framework to speed up slice-to-volume ultrasound reconstruction. We use tensor-rank decomposition, to decompose the typical 3D volume into sets of tri-planes, and store those instead, as well as a small neural network. A set of 2D ultrasound scans, with their ground truth (or estimated) 3D position and orientation (pose) is all that is required to form a complete 3D reconstruction. Reconstructions are formed from real fetal brain scans, and then evaluated by requesting novel cross-sectional views. When compared to prior approaches based on fully implicit representation (e.g. neural radiance fields), our method is over 3x quicker, 46% more accurate, and if given inaccurate poses is more robust. Further speed-up is also possible by reconstructing from a structural prior rather than from scratch.
Read more4/17/2024

0
Sequence-aware Pre-training for Echocardiography Probe Guidance
Haojun Jiang, Zhenguo Sun, Yu Sun, Ning Jia, Meng Li, Shaqi Luo, Shiji Song, Gao Huang
Cardiac ultrasound probe guidance aims to help novices adjust the 6-DOF probe pose to obtain high-quality sectional images. Cardiac ultrasound faces two major challenges: (1) the inherently complex structure of the heart, and (2) significant individual variations. Previous works have only learned the population-averaged 2D and 3D structures of the heart rather than personalized cardiac structural features, leading to a performance bottleneck. Clinically, we observed that sonographers adjust their understanding of a patient's cardiac structure based on prior scanning sequences, thereby modifying their scanning strategies. Inspired by this, we propose a sequence-aware self-supervised pre-training method. Specifically, our approach learns personalized 2D and 3D cardiac structural features by predicting the masked-out images and actions in a scanning sequence. We hypothesize that if the model can predict the missing content it has acquired a good understanding of the personalized cardiac structure. In the downstream probe guidance task, we also introduced a sequence modeling approach that models individual cardiac structural information based on the images and actions from historical scan data, enabling more accurate navigation decisions. Experiments on a large-scale dataset with 1.36 million samples demonstrated that our proposed sequence-aware paradigm can significantly reduce navigation errors, with translation errors decreasing by 15.90% to 36.87% and rotation errors decreasing by 11.13% to 20.77%, compared to state-of-the-art methods.
Read more8/28/2024