EqDrive: Efficient Equivariant Motion Forecasting with Multi-Modality for Autonomous Driving
2310.17540
0
0
🔄
Abstract
Forecasting vehicular motions in autonomous driving requires a deep understanding of agent interactions and the preservation of motion equivariance under Euclidean geometric transformations. Traditional models often lack the sophistication needed to handle the intricate dynamics inherent to autonomous vehicles and the interaction relationships among agents in the scene. As a result, these models have a lower model capacity, which then leads to higher prediction errors and lower training efficiency. In our research, we employ EqMotion, a leading equivariant particle, and human prediction model that also accounts for invariant agent interactions, for the task of multi-agent vehicle motion forecasting. In addition, we use a multi-modal prediction mechanism to account for multiple possible future paths in a probabilistic manner. By leveraging EqMotion, our model achieves state-of-the-art (SOTA) performance with fewer parameters (1.2 million) and a significantly reduced training time (less than 2 hours).
Create account to get full access
Overview
- The paper focuses on improving the accuracy and efficiency of vehicle motion forecasting for autonomous driving systems.
- It employs a leading equivariant particle and human prediction model called EqMotion that accounts for agent interactions and preserves motion equivariance under geometric transformations.
- The model also uses a multi-modal prediction mechanism to account for multiple possible future paths in a probabilistic manner.
- The proposed approach achieves state-of-the-art performance with fewer parameters and significantly reduced training time compared to traditional models.
Plain English Explanation
Autonomous vehicles need to be able to accurately predict the future movements of other vehicles on the road in order to navigate safely. Traditional models for this task often struggle to capture the complex interactions between vehicles and the way their motions change under different geometric conditions.
The researchers in this study used a more advanced model called EqMotion that is better able to handle these challenges. EqMotion is designed to understand how the movements of one vehicle can affect the movements of others around it, and it can also account for how those movements might change if the vehicle's position or orientation is altered.
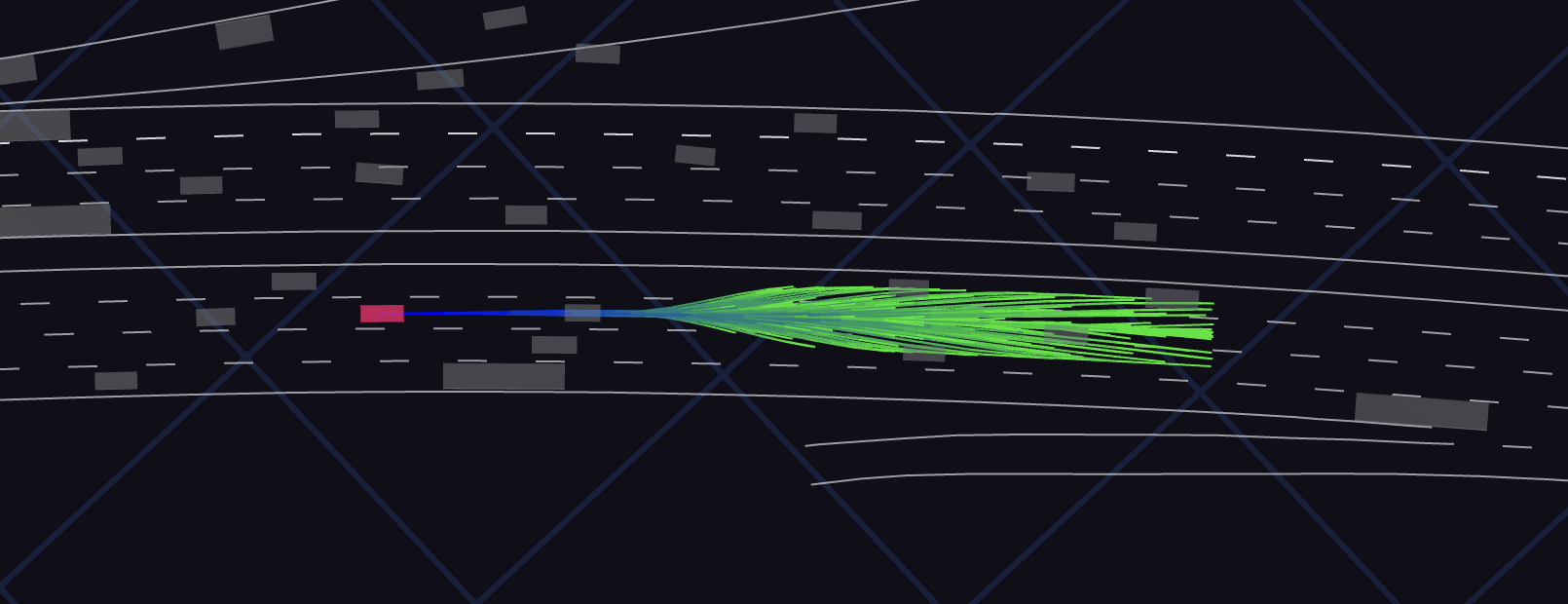
In addition, the model uses a "multi-modal" approach, which means it can predict multiple possible future paths for each vehicle, rather than just a single predicted path. This helps capture the inherent uncertainty in predicting complex vehicle motions.
By leveraging these capabilities, the researchers' model was able to achieve state-of-the-art performance in vehicle motion forecasting, while using fewer parameters and requiring less training time than traditional approaches. This could make it more practical to deploy in real-world autonomous driving systems.
Technical Explanation
The paper proposes using the EqMotion model for the task of multi-agent vehicle motion forecasting. EqMotion is a leading equivariant particle and human prediction model that accounts for both agent interactions and the preservation of motion equivariance under Euclidean geometric transformations.
Traditional motion forecasting models often lack the sophistication to handle the intricate dynamics and interaction relationships inherent to autonomous vehicle scenarios. This results in lower model capacity, higher prediction errors, and lower training efficiency.
In contrast, the EqMotion model leverages equivariant neural networks to capture the complex motion patterns and interaction dynamics between vehicles. It also employs a multi-modal prediction mechanism to generate probabilistic forecasts of multiple possible future paths for each agent.
The researchers evaluate their approach on real-world autonomous driving datasets, comparing it to state-of-the-art baselines. Their model achieves superior performance while using significantly fewer parameters (1.2 million) and requiring less than 2 hours of training time.
Critical Analysis
The paper makes a compelling case for the advantages of the EqMotion model in vehicle motion forecasting for autonomous driving. By explicitly accounting for agent interactions and preserving motion equivariance, the model is able to achieve improved accuracy and efficiency compared to traditional approaches.
However, the paper does not delve into potential limitations or caveats of the proposed method. For example, it would be valuable to understand how the model performs in more complex, crowded driving scenarios, or how it handles rare edge cases that may be critical for safe autonomous operation.
Additionally, the paper could benefit from a more thorough comparison to other state-of-the-art motion forecasting techniques, such as those based on social-aware motion generation or variational Bayesian mixture models. This would help readers better understand the unique strengths and limitations of the EqMotion approach.
Overall, the research represents an important step forward in vehicle motion forecasting for autonomous driving, but further exploration of the model's robustness and comparison to alternative techniques could strengthen the conclusions and provide a more comprehensive understanding of its practical implications.
Conclusion
This paper presents a novel approach to vehicle motion forecasting for autonomous driving systems, leveraging the EqMotion model to achieve state-of-the-art performance with improved efficiency.
By accounting for agent interactions and preserving motion equivariance, the EqMotion model is able to better capture the complex dynamics inherent to autonomous vehicle scenarios. The addition of a multi-modal prediction mechanism further enhances the model's ability to generate probabilistic forecasts of multiple possible future paths.
The researchers demonstrate the effectiveness of their approach through experiments on real-world datasets, showing significant improvements over traditional motion forecasting techniques. The reduced parameter count and training time of the EqMotion model also make it a more practical solution for deployment in real-world autonomous driving applications.
Overall, this research represents an important advancement in the field of autonomous vehicle motion forecasting, with the potential to contribute to the development of safer and more reliable self-driving systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
QuAD: Query-based Interpretable Neural Motion Planning for Autonomous Driving
Sourav Biswas, Sergio Casas, Quinlan Sykora, Ben Agro, Abbas Sadat, Raquel Urtasun
0
0
A self-driving vehicle must understand its environment to determine the appropriate action. Traditional autonomy systems rely on object detection to find the agents in the scene. However, object detection assumes a discrete set of objects and loses information about uncertainty, so any errors compound when predicting the future behavior of those agents. Alternatively, dense occupancy grid maps have been utilized to understand free-space. However, predicting a grid for the entire scene is wasteful since only certain spatio-temporal regions are reachable and relevant to the self-driving vehicle. We present a unified, interpretable, and efficient autonomy framework that moves away from cascading modules that first perceive, then predict, and finally plan. Instead, we shift the paradigm to have the planner query occupancy at relevant spatio-temporal points, restricting the computation to those regions of interest. Exploiting this representation, we evaluate candidate trajectories around key factors such as collision avoidance, comfort, and progress for safety and interpretability. Our approach achieves better highway driving quality than the state-of-the-art in high-fidelity closed-loop simulations.
4/3/2024

Valeo4Cast: A Modular Approach to End-to-End Forecasting
Yihong Xu, 'Eloi Zablocki, Alexandre Boulch, Gilles Puy, Mickael Chen, Florent Bartoccioni, Nermin Samet, Oriane Sim'eoni, Spyros Gidaris, Tuan-Hung Vu, Andrei Bursuc, Eduardo Valle, Renaud Marlet, Matthieu Cord
0
0
Motion forecasting is crucial in autonomous driving systems to anticipate the future trajectories of surrounding agents such as pedestrians, vehicles, and traffic signals. In end-to-end forecasting, the model must jointly detect from sensor data (cameras or LiDARs) the position and past trajectories of the different elements of the scene and predict their future location. We depart from the current trend of tackling this task via end-to-end training from perception to forecasting and we use a modular approach instead. Following a recent study, we individually build and train detection, tracking, and forecasting modules. We then only use consecutive finetuning steps to integrate the modules better and alleviate compounding errors. Our study reveals that this simple yet effective approach significantly improves performance on the end-to-end forecasting benchmark. Consequently, our solution ranks first in the Argoverse 2 end-to-end Forecasting Challenge held at CVPR 2024 Workshop on Autonomous Driving (WAD), with 63.82 mAPf. We surpass forecasting results by +17.1 points over last year's winner and by +13.3 points over this year's runner-up. This remarkable performance in forecasting can be explained by our modular paradigm, which integrates finetuning strategies and significantly outperforms the end-to-end-trained counterparts.
6/13/2024

ADM: Accelerated Diffusion Model via Estimated Priors for Robust Motion Prediction under Uncertainties
Jiahui Li, Tianle Shen, Zekai Gu, Jiawei Sun, Chengran Yuan, Yuhang Han, Shuo Sun, Marcelo H. Ang Jr
0
0
Motion prediction is a challenging problem in autonomous driving as it demands the system to comprehend stochastic dynamics and the multi-modal nature of real-world agent interactions. Diffusion models have recently risen to prominence, and have proven particularly effective in pedestrian motion prediction tasks. However, the significant time consumption and sensitivity to noise have limited the real-time predictive capability of diffusion models. In response to these impediments, we propose a novel diffusion-based, acceleratable framework that adeptly predicts future trajectories of agents with enhanced resistance to noise. The core idea of our model is to learn a coarse-grained prior distribution of trajectory, which can skip a large number of denoise steps. This advancement not only boosts sampling efficiency but also maintains the fidelity of prediction accuracy. Our method meets the rigorous real-time operational standards essential for autonomous vehicles, enabling prompt trajectory generation that is vital for secure and efficient navigation. Through extensive experiments, our method speeds up the inference time to 136ms compared to standard diffusion model, and achieves significant improvement in multi-agent motion prediction on the Argoverse 1 motion forecasting dataset.
5/3/2024

Scaling Motion Forecasting Models with Ensemble Distillation
Scott Ettinger, Kratarth Goel, Avikalp Srivastava, Rami Al-Rfou
0
0
Motion forecasting has become an increasingly critical component of autonomous robotic systems. Onboard compute budgets typically limit the accuracy of real-time systems. In this work we propose methods of improving motion forecasting systems subject to limited compute budgets by combining model ensemble and distillation techniques. The use of ensembles of deep neural networks has been shown to improve generalization accuracy in many application domains. We first demonstrate significant performance gains by creating a large ensemble of optimized single models. We then develop a generalized framework to distill motion forecasting model ensembles into small student models which retain high performance with a fraction of the computing cost. For this study we focus on the task of motion forecasting using real world data from autonomous driving systems. We develop ensemble models that are very competitive on the Waymo Open Motion Dataset (WOMD) and Argoverse leaderboards. From these ensembles, we train distilled student models which have high performance at a fraction of the compute costs. These experiments demonstrate distillation from ensembles as an effective method for improving accuracy of predictive models for robotic systems with limited compute budgets.
5/15/2024