ADM: Accelerated Diffusion Model via Estimated Priors for Robust Motion Prediction under Uncertainties
2405.00797
0
0

Abstract
Motion prediction is a challenging problem in autonomous driving as it demands the system to comprehend stochastic dynamics and the multi-modal nature of real-world agent interactions. Diffusion models have recently risen to prominence, and have proven particularly effective in pedestrian motion prediction tasks. However, the significant time consumption and sensitivity to noise have limited the real-time predictive capability of diffusion models. In response to these impediments, we propose a novel diffusion-based, acceleratable framework that adeptly predicts future trajectories of agents with enhanced resistance to noise. The core idea of our model is to learn a coarse-grained prior distribution of trajectory, which can skip a large number of denoise steps. This advancement not only boosts sampling efficiency but also maintains the fidelity of prediction accuracy. Our method meets the rigorous real-time operational standards essential for autonomous vehicles, enabling prompt trajectory generation that is vital for secure and efficient navigation. Through extensive experiments, our method speeds up the inference time to 136ms compared to standard diffusion model, and achieves significant improvement in multi-agent motion prediction on the Argoverse 1 motion forecasting dataset.
Create account to get full access
Overview
- This paper introduces the Accelerated Diffusion Model (ADM), a new approach for robust motion prediction under uncertainties.
- ADM leverages estimated priors to accelerate the diffusion process, enabling more efficient and accurate predictions.
- The model is designed to handle various types of motion data, including vehicles, pedestrians, and robots, and can adapt to changing environments and uncertainties.
Plain English Explanation
The Accelerated Diffusion Model (ADM) is a new machine learning technique that can accurately predict the future movement of objects, such as vehicles, pedestrians, and robots, even in uncertain or changing environments. Traditional motion prediction models can struggle when faced with complex real-world situations, but ADM addresses this by using "estimated priors" - that is, it makes educated guesses about the likely paths an object will take based on past data.
This allows ADM to accelerate the prediction process, making it more efficient and reliable. For example, if a car is driving on the highway, ADM can quickly predict its likely future trajectory by considering factors like the car's current speed, the layout of the road, and common driving patterns. [This is similar to how a self-driving car might anticipate a car's movements.]
ADM's ability to adapt to changing conditions and handle uncertainty is a key advantage. If an unexpected event occurs, like a pedestrian crossing the street, ADM can quickly update its predictions to account for the new information. [This is similar to how pedestrian trajectory prediction models need to handle the unpredictable movements of people.]
Overall, the Accelerated Diffusion Model represents an important advance in motion prediction technology, with applications in areas like self-driving cars, robotics, and urban planning.
Technical Explanation
The core idea behind the Accelerated Diffusion Model (ADM) is to leverage estimated priors to accelerate the diffusion process for more efficient and robust motion prediction. Traditional diffusion models, such as Taming Diffusion, can be computationally expensive and struggle to adapt to uncertainties in the data.
ADM addresses these challenges by incorporating estimated priors into the diffusion process. The priors are learned from historical data and used to guide the model's predictions, reducing the number of diffusion steps required and improving accuracy. This is similar to the concept of subpath linear approximation used to accelerate image generation.
The authors demonstrate the effectiveness of ADM on a variety of motion prediction tasks, including vehicle trajectories, pedestrian paths, and robotic movements. Experiments show that ADM outperforms existing approaches in terms of prediction accuracy, especially in the presence of uncertainties and changing environments.
One key innovation of ADM is its ability to handle multi-modal outputs, capturing the different possible future trajectories an object might take. This is similar to the motion-aware latent diffusion models used for video frame prediction.
Critical Analysis
The paper provides a thorough evaluation of ADM's performance across multiple motion prediction tasks, highlighting its advantages over existing approaches. However, the authors acknowledge several limitations and areas for further research:
- The model relies on estimated priors, which may not always be accurate or available, especially for novel or rare scenarios.
- The training process can be computationally intensive, as the model needs to learn the priors from historical data.
- The authors suggest exploring ways to dynamically update the priors during inference to better adapt to changing environments.
Additionally, the paper does not delve into the potential ethical considerations of motion prediction technologies, such as privacy concerns or the impact on vulnerable road users. Further research is needed to address these broader societal implications.
Conclusion
The Accelerated Diffusion Model (ADM) represents an important advancement in motion prediction, addressing key challenges faced by traditional diffusion-based approaches. By incorporating estimated priors, ADM can make more efficient and accurate predictions, even in the presence of uncertainties and changing environments.
The model's ability to handle multi-modal outputs and adapt to various types of motion data, including vehicles, pedestrians, and robots, suggests widespread applicability in fields like self-driving cars, robotics, and urban planning. As the authors highlight, ongoing research to address the model's limitations and explore ethical implications will be crucial for realizing the full potential of this technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔮
Navigating Autonomous Vehicle on Unmarked Roads with Diffusion-Based Motion Prediction and Active Inference
Yufei Huang, Yulin Li, Andrea Matta, Mohsen Jafari
0
0
This paper presents a novel approach to improving autonomous vehicle control in environments lacking clear road markings by integrating a diffusion-based motion predictor within an Active Inference Framework (AIF). Using a simulated parking lot environment as a parallel to unmarked roads, we develop and test our model to predict and guide vehicle movements effectively. The diffusion-based motion predictor forecasts vehicle actions by leveraging probabilistic dynamics, while AIF aids in decision-making under uncertainty. Unlike traditional methods such as Model Predictive Control (MPC) and Reinforcement Learning (RL), our approach reduces computational demands and requires less extensive training, enhancing navigation safety and efficiency. Our results demonstrate the model's capability to navigate complex scenarios, marking significant progress in autonomous driving technology.
6/4/2024
🔮
Uncertainty-Aware Pedestrian Trajectory Prediction via Distributional Diffusion
Yao Liu, Zesheng Ye, Rui Wang, Binghao Li, Quan Z. Sheng, Lina Yao
0
0
Tremendous efforts have been put forth on predicting pedestrian trajectory with generative models to accommodate uncertainty and multi-modality in human behaviors. An individual's inherent uncertainty, e.g., change of destination, can be masked by complex patterns resulting from the movements of interacting pedestrians. However, latent variable-based generative models often entangle such uncertainty with complexity, leading to limited either latent expressivity or predictive diversity. In this work, we propose to separately model these two factors by implicitly deriving a flexible latent representation to capture intricate pedestrian movements, while integrating predictive uncertainty of individuals with explicit bivariate Gaussian mixture densities over their future locations. More specifically, we present a model-agnostic uncertainty-aware pedestrian trajectory prediction framework, parameterizing sufficient statistics for the mixture of Gaussians that jointly comprise the multi-modal trajectories. We further estimate these parameters of interest by approximating a denoising process that progressively recovers pedestrian movements from noise. Unlike previous studies, we translate the predictive stochasticity to explicit distributions, allowing it to readily generate plausible future trajectories indicating individuals' self-uncertainty. Moreover, our framework is compatible with different neural net architectures. We empirically show the performance gains over state-of-the-art even with lighter backbones, across most scenes on two public benchmarks.
5/14/2024
🔮
Reliable Trajectory Prediction and Uncertainty Quantification with Conditioned Diffusion Models
Marion Neumeier, Sebastian Dorn, Michael Botsch, Wolfgang Utschick
0
0
This work introduces the conditioned Vehicle Motion Diffusion (cVMD) model, a novel network architecture for highway trajectory prediction using diffusion models. The proposed model ensures the drivability of the predicted trajectory by integrating non-holonomic motion constraints and physical constraints into the generative prediction module. Central to the architecture of cVMD is its capacity to perform uncertainty quantification, a feature that is crucial in safety-critical applications. By integrating the quantified uncertainty into the prediction process, the cVMD's trajectory prediction performance is improved considerably. The model's performance was evaluated using the publicly available highD dataset. Experiments show that the proposed architecture achieves competitive trajectory prediction accuracy compared to state-of-the-art models, while providing guaranteed drivable trajectories and uncertainty quantification.
5/24/2024
Constraint-Aware Diffusion Models for Trajectory Optimization
Anjian Li, Zihan Ding, Adji Bousso Dieng, Ryne Beeson
0
0
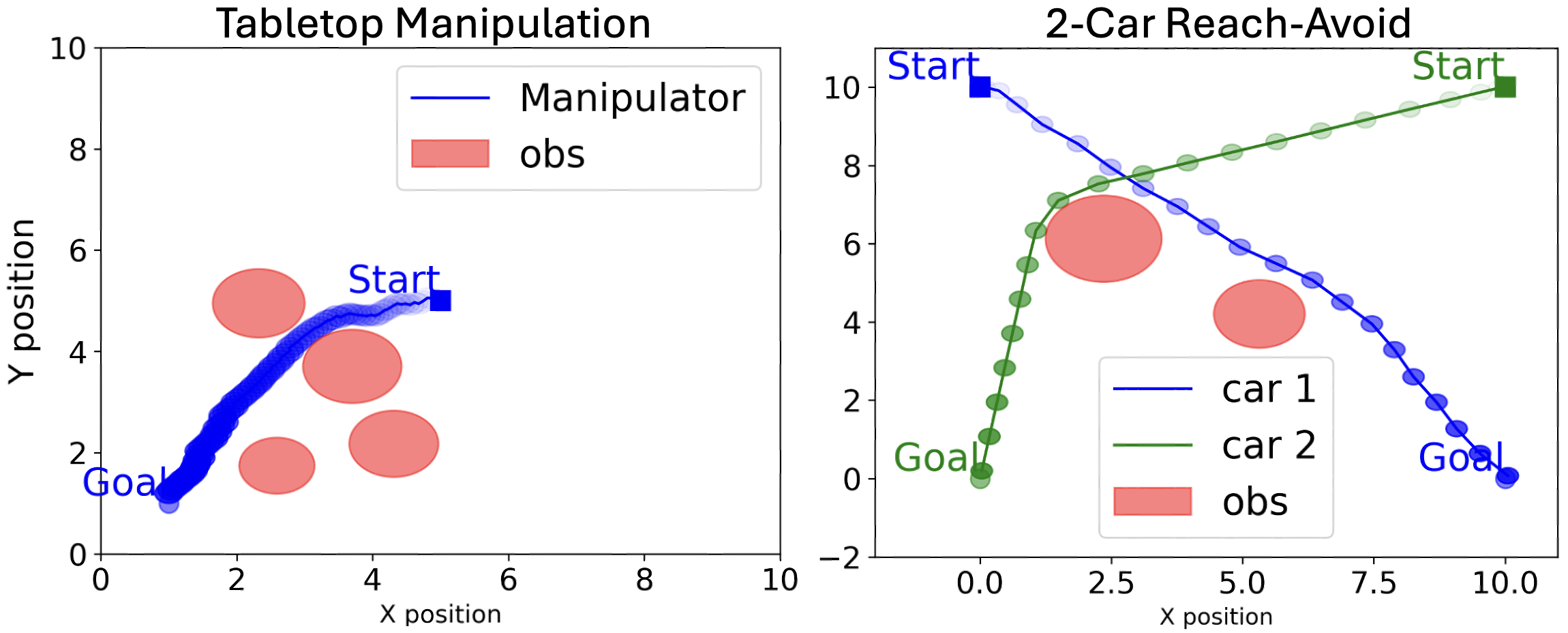
The diffusion model has shown success in generating high-quality and diverse solutions to trajectory optimization problems. However, diffusion models with neural networks inevitably make prediction errors, which leads to constraint violations such as unmet goals or collisions. This paper presents a novel constraint-aware diffusion model for trajectory optimization. We introduce a novel hybrid loss function for training that minimizes the constraint violation of diffusion samples compared to the groundtruth while recovering the original data distribution. Our model is demonstrated on tabletop manipulation and two-car reach-avoid problems, outperforming traditional diffusion models in minimizing constraint violations while generating samples close to locally optimal solutions.
6/4/2024