The Essential Role of Causality in Foundation World Models for Embodied AI
2402.06665
0
0

Abstract
Recent advances in foundation models, especially in large multi-modal models and conversational agents, have ignited interest in the potential of generally capable embodied agents. Such agents will require the ability to perform new tasks in many different real-world environments. However, current foundation models fail to accurately model physical interactions and are therefore insufficient for Embodied AI. The study of causality lends itself to the construction of veridical world models, which are crucial for accurately predicting the outcomes of possible interactions. This paper focuses on the prospects of building foundation world models for the upcoming generation of embodied agents and presents a novel viewpoint on the significance of causality within these. We posit that integrating causal considerations is vital to facilitating meaningful physical interactions with the world. Finally, we demystify misconceptions about causality in this context and present our outlook for future research.
Create account to get full access
Overview
- The paper discusses the essential role of causality in foundation world models for embodied AI systems.
- It argues that causal world models are crucial for enabling robust and safe AI agents that can learn, reason, and act in the real world.
- The paper highlights the limitations of current AI systems that lack causal understanding and the importance of developing veridical world models grounded in causal principles.
Plain English Explanation
Embodied AI systems, like robots or virtual agents, need to have a deep understanding of how the world works in order to learn, reason, and take actions effectively and safely. This paper makes the case that a key component of this understanding is causality - the ability to recognize cause-and-effect relationships in the world.
Traditional AI systems often rely on statistical patterns in data, without truly grasping the underlying causal mechanisms. This can lead to brittleness, where the systems break down when faced with novel situations or changes in the environment. In contrast, the paper argues that developing "causal world models" - representations of the world that capture causal relationships - is essential for building robust and adaptable embodied AI agents.
By learning these causal models, AI systems can better anticipate the consequences of their actions, reason about counterfactuals, and transfer knowledge to new contexts. This causal understanding is crucial for enabling safe and reliable embodied AI that can operate in the real world, where unexpected events and changing circumstances are the norm.
The paper highlights several research efforts that have begun to explore the role of causality in AI, such as work on robust agents that learn causal world models, zero-shot safety prediction for autonomous robots, and the ability of large language models to capture cause-effect relationships. The paper also discusses the importance of event causality and its relevance for applications like responsible generative AI.
Overall, the paper highlights the critical need for embodied AI systems to develop a deeper understanding of causal relationships in the world, in order to become more robust, adaptive, and trustworthy.
Technical Explanation
The paper argues that the development of "foundation veridical world models" grounded in causal principles is essential for enabling robust and safe embodied AI systems. These causal world models would allow AI agents to better anticipate the consequences of their actions, reason about counterfactuals, and transfer knowledge to new contexts.
The authors highlight the limitations of current AI systems that rely primarily on statistical patterns in data, without truly grasping the underlying causal mechanisms. This can lead to brittleness, where the systems break down when faced with novel situations or changes in the environment.
In contrast, the paper discusses several research efforts that have begun to explore the role of causality in AI, such as:
-
Robust agents that learn causal world models: These agents are trained to learn causal representations of their environment, which allows them to be more adaptable and robust to changes.
-
Zero-shot safety prediction for autonomous robots: This work demonstrates the ability to predict the safety of robot actions based on causal models, without requiring extensive training on specific scenarios.
-
Cause-effect capture in large language models: Research has shown that large language models can learn to capture some causal relationships from text, suggesting the potential for more sophisticated causal reasoning in AI.
The paper also discusses the importance of event causality and its relevance for applications like responsible generative AI, where causal models could help ensure the safety and reliability of generated outputs.
Critical Analysis
The paper makes a compelling case for the essential role of causality in foundation world models for embodied AI. However, it acknowledges that developing such causal world models is a significant challenge, as it requires AI systems to move beyond pattern recognition to truly understand the underlying causal mechanisms in the world.
The authors note that current AI systems often lack the ability to reason about counterfactuals and transfer knowledge to new contexts, which are key capabilities enabled by causal understanding. They suggest that more research is needed to explore the development of causal world models and their integration into embodied AI systems.
One potential limitation of the paper is that it does not delve deeply into the specific technical approaches or challenges involved in building these causal world models. The discussion of the research efforts in this area, while informative, could be expanded to provide more insights into the current state of the field and the remaining hurdles.
Additionally, the paper could have addressed potential concerns or ethical considerations around the development of such causal world models, particularly in the context of sensitive applications like autonomous systems or generative AI. Exploring these issues could help readers think more critically about the implications and potential pitfalls of this research.
Conclusion
This paper makes a compelling argument for the essential role of causality in the development of foundation world models for embodied AI systems. It highlights the limitations of current AI approaches that rely primarily on statistical patterns, and the importance of building causal representations of the world to enable more robust, adaptive, and trustworthy AI agents.
The paper discusses several ongoing research efforts that are exploring the integration of causal reasoning into AI, and the potential benefits this could bring for applications like safety prediction, knowledge transfer, and responsible generative AI. While the technical challenges involved in building causal world models are significant, the paper makes a strong case for the critical importance of this line of research for the future of embodied AI.
By developing a deeper understanding of causal relationships in the world, AI systems can become more capable of anticipating the consequences of their actions, reasoning about counterfactuals, and adapting to novel situations. This causal understanding is essential for enabling safe and reliable embodied AI that can operate effectively in the complex, dynamic, and unpredictable real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👨🏫
Robust agents learn causal world models
Jonathan Richens, Tom Everitt
0
0
It has long been hypothesised that causal reasoning plays a fundamental role in robust and general intelligence. However, it is not known if agents must learn causal models in order to generalise to new domains, or if other inductive biases are sufficient. We answer this question, showing that any agent capable of satisfying a regret bound under a large set of distributional shifts must have learned an approximate causal model of the data generating process, which converges to the true causal model for optimal agents. We discuss the implications of this result for several research areas including transfer learning and causal inference.
4/10/2024
Multimodal foundation world models for generalist embodied agents
Pietro Mazzaglia, Tim Verbelen, Bart Dhoedt, Aaron Courville, Sai Rajeswar
0
0
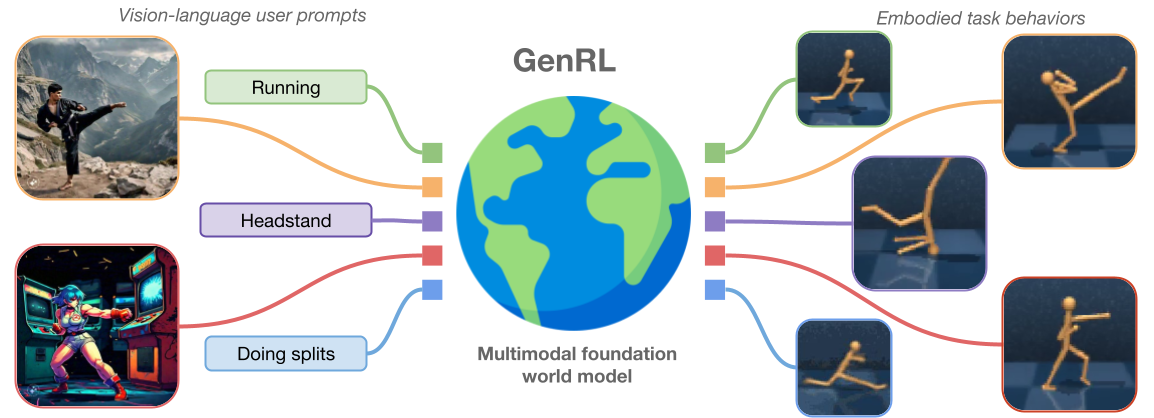
Learning generalist embodied agents, able to solve multitudes of tasks in different domains is a long-standing problem. Reinforcement learning (RL) is hard to scale up as it requires a complex reward design for each task. In contrast, language can specify tasks in a more natural way. Current foundation vision-language models (VLMs) generally require fine-tuning or other adaptations to be functional, due to the significant domain gap. However, the lack of multimodal data in such domains represents an obstacle toward developing foundation models for embodied applications. In this work, we overcome these problems by presenting multimodal foundation world models, able to connect and align the representation of foundation VLMs with the latent space of generative world models for RL, without any language annotations. The resulting agent learning framework, GenRL, allows one to specify tasks through vision and/or language prompts, ground them in the embodied domain's dynamics, and learns the corresponding behaviors in imagination. As assessed through large-scale multi-task benchmarking, GenRL exhibits strong multi-task generalization performance in several locomotion and manipulation domains. Furthermore, by introducing a data-free RL strategy, it lays the groundwork for foundation model-based RL for generalist embodied agents.
6/27/2024
📈
An Interactive Agent Foundation Model
Zane Durante, Bidipta Sarkar, Ran Gong, Rohan Taori, Yusuke Noda, Paul Tang, Ehsan Adeli, Shrinidhi Kowshika Lakshmikanth, Kevin Schulman, Arnold Milstein, Demetri Terzopoulos, Ade Famoti, Noboru Kuno, Ashley Llorens, Hoi Vo, Katsu Ikeuchi, Li Fei-Fei, Jianfeng Gao, Naoki Wake, Qiuyuan Huang
0
0
The development of artificial intelligence systems is transitioning from creating static, task-specific models to dynamic, agent-based systems capable of performing well in a wide range of applications. We propose an Interactive Agent Foundation Model that uses a novel multi-task agent training paradigm for training AI agents across a wide range of domains, datasets, and tasks. Our training paradigm unifies diverse pre-training strategies, including visual masked auto-encoders, language modeling, and next-action prediction, enabling a versatile and adaptable AI framework. We demonstrate the performance of our framework across three separate domains -- Robotics, Gaming AI, and Healthcare. Our model demonstrates its ability to generate meaningful and contextually relevant outputs in each area. The strength of our approach lies in its generality, leveraging a variety of data sources such as robotics sequences, gameplay data, large-scale video datasets, and textual information for effective multimodal and multi-task learning. Our approach provides a promising avenue for developing generalist, action-taking, multimodal systems.
6/18/2024
🌐
New!Disentangled Representations for Causal Cognition
Filippo Torresan, Manuel Baltieri
0
0
Complex adaptive agents consistently achieve their goals by solving problems that seem to require an understanding of causal information, information pertaining to the causal relationships that exist among elements of combined agent-environment systems. Causal cognition studies and describes the main characteristics of causal learning and reasoning in human and non-human animals, offering a conceptual framework to discuss cognitive performances based on the level of apparent causal understanding of a task. Despite the use of formal intervention-based models of causality, including causal Bayesian networks, psychological and behavioural research on causal cognition does not yet offer a computational account that operationalises how agents acquire a causal understanding of the world. Machine and reinforcement learning research on causality, especially involving disentanglement as a candidate process to build causal representations, represent on the one hand a concrete attempt at designing causal artificial agents that can shed light on the inner workings of natural causal cognition. In this work, we connect these two areas of research to build a unifying framework for causal cognition that will offer a computational perspective on studies of animal cognition, and provide insights in the development of new algorithms for causal reinforcement learning in AI.
7/2/2024