Estimate collective cooperativeness of driving agents in mixed traffic flow

0

Sign in to get full access
Overview
- Provides a method to estimate the collective cooperativeness of driving agents in mixed traffic flow
- Develops a framework to analyze the equilibrium traffic models and measure cooperativeness
- Applies the framework to study collective behaviors in various traffic scenarios
Plain English Explanation
The paper presents a way to measure how much driving agents in a mixed traffic environment cooperate with each other. Mixed traffic refers to a situation where both human-driven and autonomous (self-driving) vehicles share the same roads.
The researchers develop a framework to analyze the equilibrium, or stable, traffic models and use this to assess the level of "cooperativeness" among the driving agents. Cooperativeness refers to the willingness of drivers to coordinate their actions and make decisions that benefit the whole traffic system, rather than just optimizing for their own interests.
By applying this framework to different traffic scenarios, the researchers can study how the collective behavior of the driving agents changes. This gives insights into how factors like the proportion of autonomous vehicles, traffic congestion levels, and driver preferences impact the overall cooperativeness in the traffic system.
Technical Explanation
The paper first introduces equilibrium traffic models that describe the stable state of traffic flow. It then develops a methodology to quantify the "collective cooperativeness" of driving agents in these equilibrium models.
The key steps are:
- Defining a cooperativeness index that captures the degree to which drivers coordinate their actions to optimize the overall traffic system performance, rather than just their individual goals.
- Deriving analytical expressions for this cooperativeness index based on the equilibrium traffic model parameters, such as the proportion of autonomous vehicles and driver behavior preferences.
- Applying this framework to study collective behaviors in various traffic scenarios, including different levels of congestion and autonomous vehicle penetration rates.
The results show how the collective cooperativeness of the driving agents is influenced by factors like the mix of human and autonomous vehicles, driver characteristics, and traffic conditions. This provides insights into how autonomous vehicles and coordination mechanisms can be designed to improve the overall efficiency and safety of mixed traffic flows.
Critical Analysis
The paper provides a rigorous mathematical framework to quantify the collective cooperativeness in mixed traffic environments. This is a valuable contribution, as understanding driver coordination is crucial for developing effective traffic management strategies, especially as autonomous vehicles become more prevalent.
However, the analysis is limited to idealized equilibrium traffic models, which may not fully capture the dynamic and stochastic nature of real-world traffic. Additionally, the cooperativeness index is an abstract metric that may not directly translate to tangible improvements in traffic flow or safety.
Further research is needed to validate the framework against empirical data and explore its practical applications. For example, the model could be extended to study the impact of communication and coordination mechanisms between vehicles, or to investigate how changes in driver behavior or infrastructure design influence the overall cooperativeness in the traffic system.
Conclusion
This paper presents a novel approach to estimate the collective cooperativeness of driving agents in mixed traffic environments. By developing a framework to analyze equilibrium traffic models, the researchers demonstrate how factors like autonomous vehicle penetration and driver preferences can impact the overall coordination and efficiency of the traffic system.
While the analysis is theoretical, the insights provided could inform the design of traffic management systems and autonomous vehicle control algorithms to promote more cooperative and socially-optimal driving behaviors. Further research is needed to validate the model and explore its practical applications in real-world traffic scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Estimate collective cooperativeness of driving agents in mixed traffic flow
Di Chen, Jia Li, H. Michael Zhang
Cooperation is a ubiquitous phenomenon in many natural, social, and engineered systems that contain multiple agents. Characterizing and quantifying cooperativeness of driving agents is of interest and significance for two reasons. Theoretically, it will enhance the understanding of micro-macro connections and emergence of cooperation in mixed traffic. Pragmatically, this understanding will benefit the design and operations of automated and mixed-autonomy transportation systems. However, it remains unclear how the cooperativeness can be accurately defined and quantified from empirical data, and it remains open when and to what extent collective cooperativeness exists. This paper is intended to fill the gap. We propose a unified conceptual framework to estimate collective cooperativeness of driving agents leveraging a recent behavioral equilibrium model of mixed autonomy traffic (Li et al. 2022a). This framework is interpretable, theoretically consistent, and enables quantifying collective cooperativeness of traffic agents from trajectory data. We apply the framework to multilane freeway traffic employing NGSIM I-80 trajectory data set and careful data selection. Our case study indicates the existence of collective cooperativeness between human-driven passenger cars and trucks in real-world traffic and reveals its other properties that are otherwise unknown.
Read more8/15/2024
🏋️
0
Agent-Agnostic Centralized Training for Decentralized Multi-Agent Cooperative Driving
Shengchao Yan, Lukas Konig, Wolfram Burgard
Active traffic management with autonomous vehicles offers the potential for reduced congestion and improved traffic flow. However, developing effective algorithms for real-world scenarios requires overcoming challenges related to infinite-horizon traffic flow and partial observability. To address these issues and further decentralize traffic management, we propose an asymmetric actor-critic model that learns decentralized cooperative driving policies for autonomous vehicles using single-agent reinforcement learning. By employing attention neural networks with masking, our approach efficiently manages real-world traffic dynamics and partial observability, eliminating the need for predefined agents or agent-specific experience buffers in multi-agent reinforcement learning. Extensive evaluations across various traffic scenarios demonstrate our method's significant potential in improving traffic flow at critical bottleneck points. Moreover, we address the challenges posed by conservative autonomous vehicle driving behaviors that adhere strictly to traffic rules, showing that our cooperative policy effectively alleviates potential slowdowns without compromising safety.
Read more9/4/2024

0
Cooperative Automated Driving for Bottleneck Scenarios in Mixed Traffic
M. V. Baumann, J. Beyerer, H. S. Buck, B. Deml, S. Ehrhardt, Ch. Frese, D. Kleiser, M. Lauer, M. Roschani, M. Ruf, Ch. Stiller, P. Vortisch, J. R. Ziehn
Connected automated vehicles (CAV), which incorporate vehicle-to-vehicle (V2V) communication into their motion planning, are expected to provide a wide range of benefits for individual and overall traffic flow. A frequent constraint or required precondition is that compatible CAVs must already be available in traffic at high penetration rates. Achieving such penetration rates incrementally before providing ample benefits for users presents a chicken-and-egg problem that is common in connected driving development. Based on the example of a cooperative driving function for bottleneck traffic flows (e.g. at a roadblock), we illustrate how such an evolutionary, incremental introduction can be achieved under transparent assumptions and objectives. To this end, we analyze the challenge from the perspectives of automation technology, traffic flow, human factors and market, and present a principle that 1) accounts for individual requirements from each domain; 2) provides benefits for any penetration rate of compatible CAVs between 0 % and 100 % as well as upward-compatibility for expected future developments in traffic; 3) can strictly limit the negative effects of cooperation for any participant and 4) can be implemented with close-to-market technology. We discuss the technical implementation as well as the effect on traffic flow over a wide parameter spectrum for human and technical aspects.
Read more5/15/2024
0
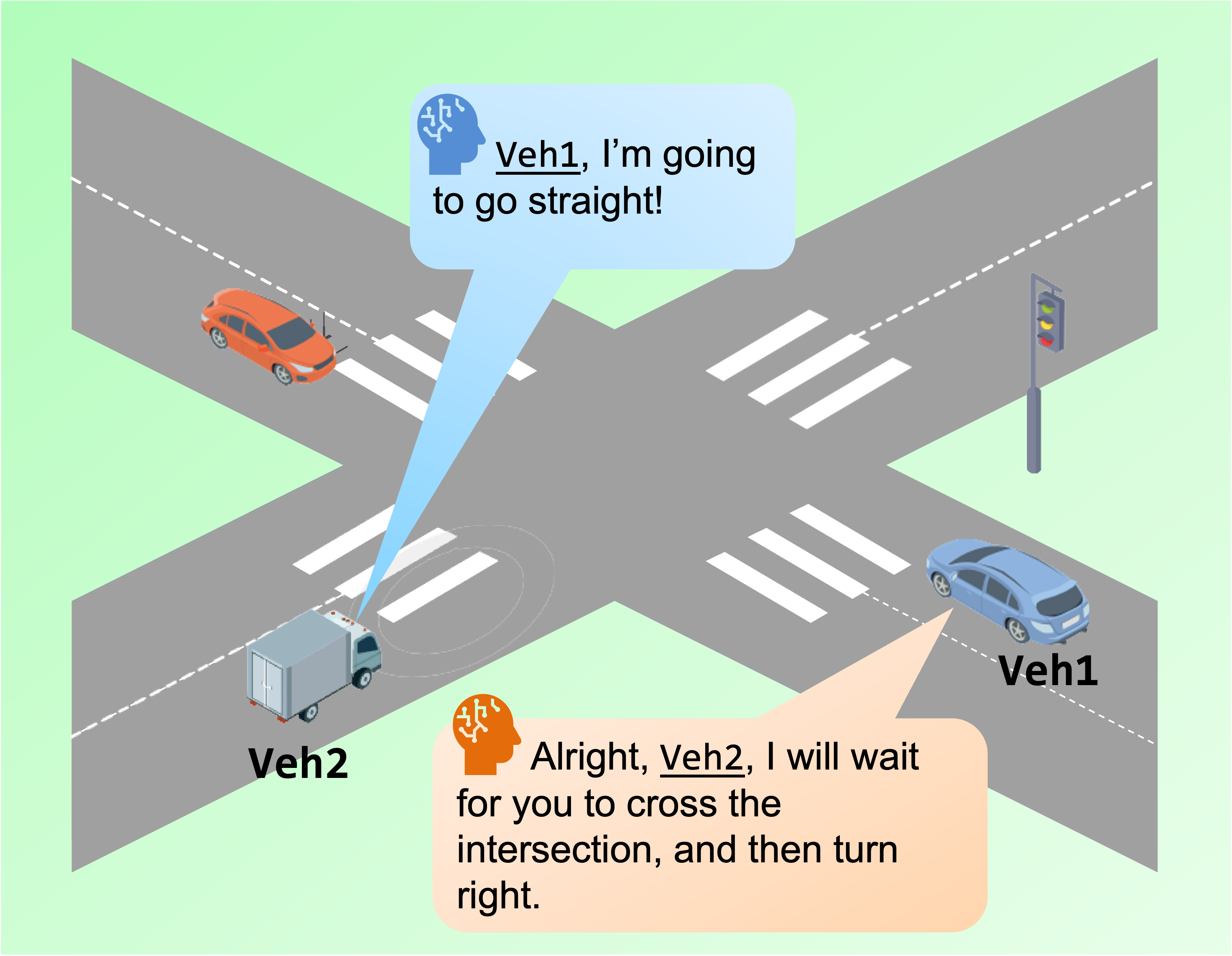
AgentsCoDriver: Large Language Model Empowered Collaborative Driving with Lifelong Learning
Senkang Hu, Zhengru Fang, Zihan Fang, Yiqin Deng, Xianhao Chen, Yuguang Fang
Connected and autonomous driving is developing rapidly in recent years. However, current autonomous driving systems, which are primarily based on data-driven approaches, exhibit deficiencies in interpretability, generalization, and continuing learning capabilities. In addition, the single-vehicle autonomous driving systems lack of the ability of collaboration and negotiation with other vehicles, which is crucial for the safety and efficiency of autonomous driving systems. In order to address these issues, we leverage large language models (LLMs) to develop a novel framework, AgentsCoDriver, to enable multiple vehicles to conduct collaborative driving. AgentsCoDriver consists of five modules: observation module, reasoning engine, cognitive memory module, reinforcement reflection module, and communication module. It can accumulate knowledge, lessons, and experiences over time by continuously interacting with the environment, thereby making itself capable of lifelong learning. In addition, by leveraging the communication module, different agents can exchange information and realize negotiation and collaboration in complex traffic environments. Extensive experiments are conducted and show the superiority of AgentsCoDriver.
Read more4/23/2024