Evaluation of Drivers' Interaction Ability at Social Scenarios: A Process-Based Framework

0
Sign in to get full access
Overview
- This paper presents a process-based framework for evaluating drivers' interaction ability in social scenarios, such as navigating intersections or merging into traffic.
- The authors propose a multi-stage model that captures the cognitive and behavioral processes involved in driver-environment interactions.
- The framework is designed to provide a more comprehensive and systematic way to assess drivers' situational awareness, decision-making, and interaction skills compared to existing approaches.
Plain English Explanation
The paper focuses on developing a new way to evaluate how well drivers can interact with other vehicles and pedestrians in real-world driving situations. The researchers recognized that current assessment methods often fall short because they don't fully capture the complex cognitive and behavioral processes that drivers use to navigate social scenarios.
To address this, the team created a multi-step framework that models the different stages of how drivers perceive the environment, make decisions, and execute actions. This includes things like how drivers identify relevant cues, assess the intentions of other road users, and choose appropriate responses. By breaking down the interaction process in this way, the researchers aim to provide a more nuanced and comprehensive evaluation of drivers' situational awareness and social interaction skills.
The ultimate goal is to develop better tools for assessing driver performance, which could have important implications for driver training, autonomous vehicle development, and traffic safety initiatives. By gaining a deeper understanding of the factors that influence driver-environment interactions, we may be able to design interventions that help improve driver skills and reduce accidents.
Technical Explanation
The proposed framework consists of four key stages: [1] Situation Perception, [2] Situation Comprehension, [3] Situation Projection, and [4] Situation Response.
In the <a href="https://aimodels.fyi/papers/arxiv/quantitative-evaluation-drivers-situation-awareness-virtual-driving">Situation Perception</a> stage, the driver gathers and processes information about the current driving environment, including the locations and movements of other vehicles, pedestrians, traffic signals, etc. This allows them to form an understanding of the current state of the scenario.
The <a href="https://aimodels.fyi/papers/arxiv/scene-extrapolation-generating-interactive-traffic-scenarios">Situation Comprehension</a> stage involves the driver interpreting the meaning and implications of the perceived information. This includes assessing the intentions and potential actions of other road users, as well as anticipating how the scenario may unfold.
In the <a href="https://aimodels.fyi/papers/arxiv/enhancing-social-decision-making-autonomous-vehicles-mixed">Situation Projection</a> stage, the driver uses their comprehension of the situation to predict future states and outcomes, allowing them to select an appropriate course of action.
Finally, the <a href="https://aimodels.fyi/papers/arxiv/towards-scenario-capability-driven-dataset-development-evaluation">Situation Response</a> stage involves the driver executing their chosen behavior, such as yielding, merging, or signaling, to navigate the social scenario.
The researchers validated their framework through a user study involving both human drivers and autonomous vehicles, demonstrating its ability to provide a more nuanced and insightful evaluation of driver-environment interactions compared to existing approaches.
Critical Analysis
The authors acknowledge several limitations of their framework, such as the challenges of accurately measuring and quantifying the cognitive processes involved in each stage. Additionally, the framework primarily focuses on interactions within a single scenario, while real-world driving often involves navigating a sequence of interconnected social situations.
Further research could explore ways to incorporate the dynamic and contextual nature of driving environments, as well as the influence of individual differences, driving experience, and situational factors on driver performance. Integrating the framework with emerging technologies, such as advanced driver assistance systems and autonomous vehicle development, could also yield valuable insights.
Overall, the proposed process-based framework represents a promising step towards a more comprehensive and systematic approach to evaluating driver interaction abilities. By shedding light on the cognitive and behavioral mechanisms underlying driver-environment interactions, this research could have important implications for improving traffic safety and supporting the development of more intelligent and socially-aware transportation systems.
Conclusion
This paper presents a novel framework for evaluating drivers' interaction abilities in social driving scenarios. By modeling the cognitive and behavioral processes involved in driver-environment interactions, the researchers aim to provide a more nuanced and comprehensive assessment compared to existing methods.
The framework's multi-stage structure, covering situation perception, comprehension, projection, and response, could have important applications in driver training, autonomous vehicle development, and traffic safety initiatives. By gaining a deeper understanding of the factors that influence driver performance in social scenarios, researchers and policymakers may be able to develop more effective interventions to improve driver skills and reduce accidents.
While the framework has some limitations, this research represents a significant step forward in the field of driver evaluation and interaction modeling. As autonomous and connected vehicle technologies continue to evolve, frameworks like this one will become increasingly crucial for ensuring the safe and seamless integration of these systems with human drivers and other road users.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Evaluation of Drivers' Interaction Ability at Social Scenarios: A Process-Based Framework
Jiaqi Liu, Peng Hang, Xiangwang Hu, Jian Sun
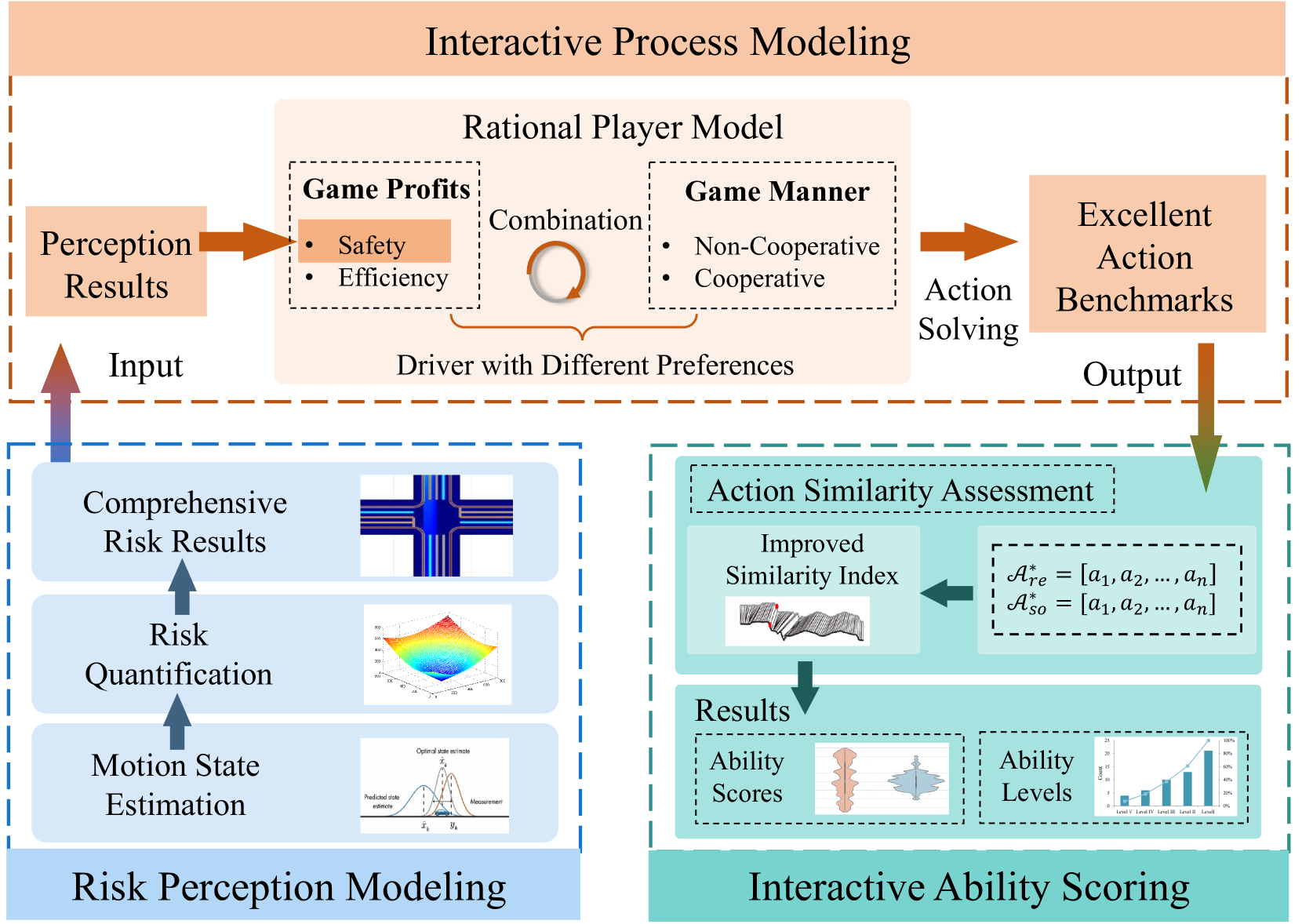
Assessing drivers' interaction capabilities is crucial for understanding human driving behavior and enhancing the interactive abilities of autonomous vehicles. In scenarios involving strong interaction, existing metrics focused on interaction outcomes struggle to capture the evolutionary process of drivers' interactive behaviors, making it challenging for autonomous vehicles to dynamically assess and respond to other agents during interactions. To address this issue, we propose a framework for assessing drivers' interaction capabilities, oriented towards the interactive process itself, which includes three components: Interaction Risk Perception, Interaction Process Modeling, and Interaction Ability Scoring. We quantify interaction risks through motion state estimation and risk field theory, followed by introducing a dynamic action assessment benchmark based on a game-theoretical rational agent model, and designing a capability scoring metric based on morphological similarity distance. By calculating real-time differences between a driver's actions and the assessment benchmark, the driver's interaction capabilities are scored dynamically. We validated our framework at unsignalized intersections as a typical scenario. Validation analysis on driver behavior datasets from China and the USA shows that our framework effectively distinguishes and evaluates conservative and aggressive driving states during interactions, demonstrating good adaptability and effectiveness in various regional settings.
Read more5/7/2024

0
Towards a Universal Evaluation Model for Careful and Competent Autonomous Driving
Kethan Reddy, Elias Nassif, Panagiotis Angeloudis, Mohammed Quddus, Washington Ochieng
Virtual scenario-based testing methods to validate autonomous driving systems are predominantly centred around collision avoidance, and lack a comprehensive approach to evaluate optimal driving behaviour holistically. Furthermore, current validation approaches do not align with authorisation and monitoring requirements put forth by regulatory bodies. We address these validation gaps by outlining a universal evaluation framework that: incorporates the notion of careful and competent driving, unifies behavioural competencies and evaluation criteria, and is amenable at a scenario-specific and aggregate behaviour level. This framework can be leveraged to evaluate optimal driving in scenario-based testing, and for post-deployment monitoring to ensure continual compliance with regulation and safety standards.
Read more7/23/2024

0
How to Drive -- An Ability-based Description of Autonomous, Remote and Human Driving
Florian Pfab, Nils Gehrke, Frank Diermeyer
The development of autonomous and remote-operated driving systems requires extensive stakeholder analyses, requirement engineering, and formalized system descriptions. This is necessary to guarantee the success of the final product after the expensive and time-consuming development phase. To integrate a formalized description of the required abilites of the system, ability graphs have been proposed in the literature. Up to this date, however, this ability graph has only been used to model less complicated driver assistance systems in the literature. This work aims to introduce the value of an ability graph-based description of complex driving systems. This is achieved by successfully demonstrating and discussing a method for constructing a holistic ability graph capable of describing the entirety of abilities required for any driving system.
Read more6/19/2024

0
Quantitative Evaluation of driver's situation awareness in virtual driving through Eye tracking analysis
Yunxiang Jiang, Qing Xu, Kai Zhen, Yu Chen
In driving tasks, the driver's situation awareness of the surrounding scenario is crucial for safety driving. However, current methods of measuring situation awareness mostly rely on subjective questionnaires, which interrupt tasks and lack non-intrusive quantification. To address this issue, our study utilizes objective gaze motion data to provide an interference-free quantification method for situation awareness. Three quantitative scores are proposed to represent three different levels of awareness: perception, comprehension, and projection, and an overall score of situation awareness is also proposed based on above three scores. To validate our findings, we conducted experiments where subjects performed driving tasks in a virtual reality simulated environment. All the four proposed situation awareness scores have clearly shown a significant correlation with driving performance. The proposed not only illuminates a new path for understanding and evaluating the situation awareness but also offers a satisfying proxy for driving performance.
Read more4/30/2024