How to Drive -- An Ability-based Description of Autonomous, Remote and Human Driving

0

Sign in to get full access
Overview
- This paper presents an ability-based description of autonomous, remote, and human driving.
- The researchers aim to establish a framework for understanding and comparing the capabilities of different driving systems, including self-driving cars, remotely operated vehicles, and human-driven cars.
- The paper explores the various abilities required for effective and safe driving, such as perception, prediction, planning, and control.
- By analyzing these abilities, the researchers hope to provide insights into the current state of autonomous driving technology and guide future development.
Plain English Explanation
The paper focuses on understanding the different abilities required for driving, whether it's done by a self-driving car, a remotely operated vehicle, or a human driver. The researchers want to establish a way to compare the capabilities of these different driving systems.
Driving is a complex task that involves several key abilities, such as perceiving the environment, predicting what will happen next, planning the best course of action, and controlling the vehicle. By analyzing these abilities, the researchers hope to gain insights into the current state of self-driving car technology and identify areas for further development.
The ultimate goal is to create a framework that can be used to objectively compare the capabilities of different driving systems, whether they are autonomous, remotely operated, or human-driven. This could help inform the development of safer and more capable self-driving cars in the future.
Technical Explanation
The paper proposes an ability-based framework for describing and comparing the driving capabilities of autonomous, remote, and human-driven systems. The researchers identify four key abilities required for effective driving: perception, prediction, planning, and control.
Perception involves the ability to sense and understand the environment, including the detection and recognition of relevant objects, obstacles, and traffic signals. Prediction refers to the ability to anticipate the future states of the environment, such as the movement of other vehicles and pedestrians. Planning is the process of determining the optimal sequence of actions to achieve a desired goal, such as reaching a destination safely. Control involves the execution of those planned actions to maneuver the vehicle.
The paper explores how these abilities are implemented and evaluated in different driving systems, including self-driving cars, remotely operated vehicles, and human drivers. The researchers analyze the strengths, weaknesses, and tradeoffs of each system's approach to these key driving abilities.
By establishing this ability-based framework, the paper aims to provide a systematic way to assess the current state of autonomous driving technology and guide future research and development efforts.
Critical Analysis
The paper provides a comprehensive and well-structured framework for understanding and comparing the driving capabilities of different systems. However, the researchers acknowledge that the framework does not fully capture the complexity of real-world driving situations, which can involve unpredictable human behavior, unexpected environmental conditions, and other factors that can challenge even the most advanced driving systems.
Additionally, the paper focuses primarily on the technical aspects of driving abilities, without delving deeply into the social and ethical implications of autonomous and remotely operated vehicles. As these systems become more prevalent, it will be crucial to consider the broader societal impact and address concerns related to safety, privacy, and accountability.
Further research is needed to explore the integration of human-driven and autonomous vehicles and the development of robust and adaptable planning and control algorithms that can handle the complexities of real-world driving scenarios.
Conclusion
This paper presents a comprehensive framework for understanding and comparing the driving abilities of autonomous, remote, and human-driven systems. By analyzing the key capabilities of perception, prediction, planning, and control, the researchers provide a systematic approach to evaluating the current state of autonomous driving technology and guiding future development.
The insights gained from this research could inform the design of safer and more capable self-driving cars, as well as the integration of these systems with human-driven vehicles. As autonomous and remotely operated driving technologies continue to evolve, it will be crucial to address the broader social and ethical implications to ensure the responsible and equitable deployment of these transformative technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
How to Drive -- An Ability-based Description of Autonomous, Remote and Human Driving
Florian Pfab, Nils Gehrke, Frank Diermeyer
The development of autonomous and remote-operated driving systems requires extensive stakeholder analyses, requirement engineering, and formalized system descriptions. This is necessary to guarantee the success of the final product after the expensive and time-consuming development phase. To integrate a formalized description of the required abilites of the system, ability graphs have been proposed in the literature. Up to this date, however, this ability graph has only been used to model less complicated driver assistance systems in the literature. This work aims to introduce the value of an ability graph-based description of complex driving systems. This is achieved by successfully demonstrating and discussing a method for constructing a holistic ability graph capable of describing the entirety of abilities required for any driving system.
Read more6/19/2024
0
Evaluation of Drivers' Interaction Ability at Social Scenarios: A Process-Based Framework
Jiaqi Liu, Peng Hang, Xiangwang Hu, Jian Sun
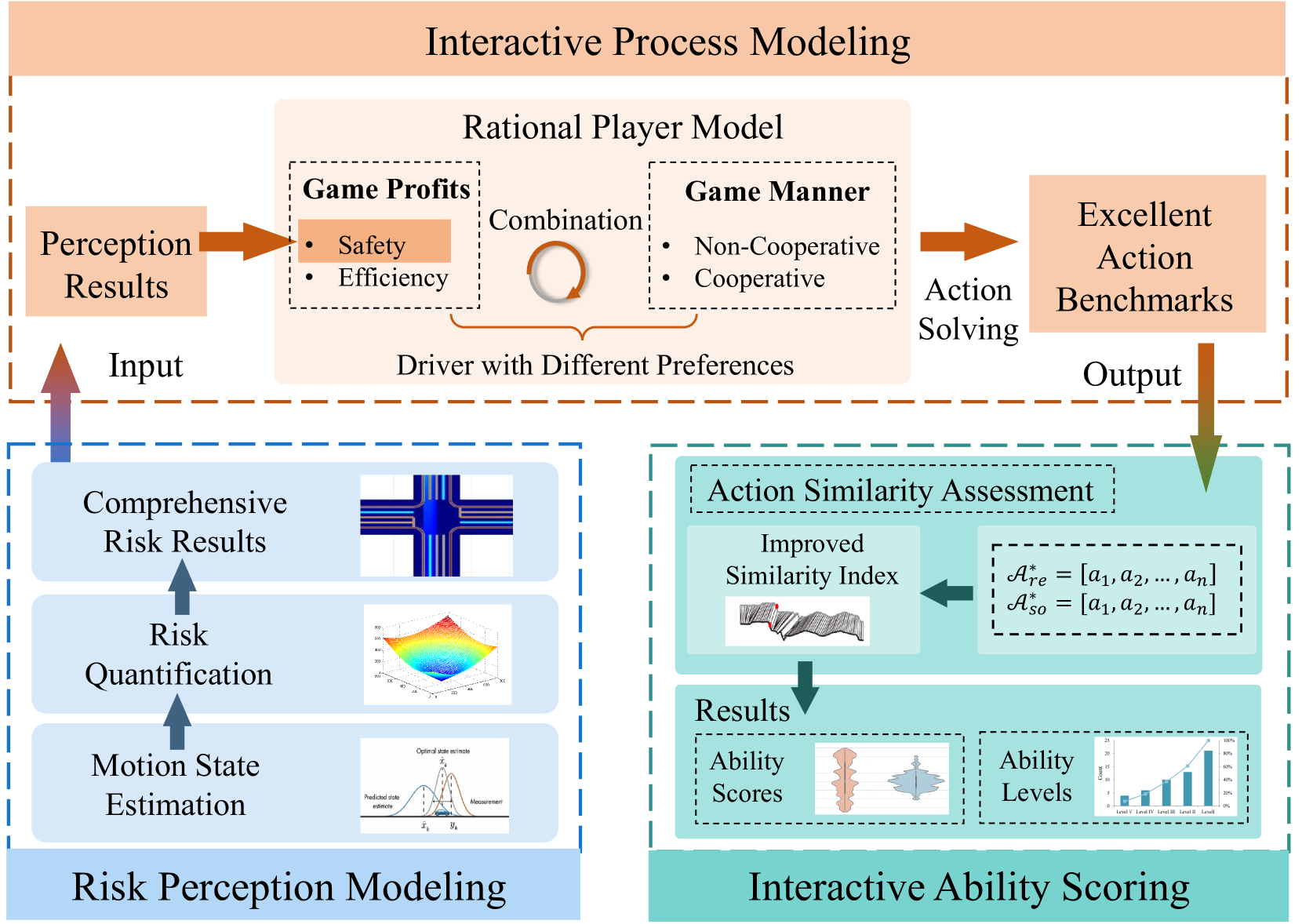
Assessing drivers' interaction capabilities is crucial for understanding human driving behavior and enhancing the interactive abilities of autonomous vehicles. In scenarios involving strong interaction, existing metrics focused on interaction outcomes struggle to capture the evolutionary process of drivers' interactive behaviors, making it challenging for autonomous vehicles to dynamically assess and respond to other agents during interactions. To address this issue, we propose a framework for assessing drivers' interaction capabilities, oriented towards the interactive process itself, which includes three components: Interaction Risk Perception, Interaction Process Modeling, and Interaction Ability Scoring. We quantify interaction risks through motion state estimation and risk field theory, followed by introducing a dynamic action assessment benchmark based on a game-theoretical rational agent model, and designing a capability scoring metric based on morphological similarity distance. By calculating real-time differences between a driver's actions and the assessment benchmark, the driver's interaction capabilities are scored dynamically. We validated our framework at unsignalized intersections as a typical scenario. Validation analysis on driver behavior datasets from China and the USA shows that our framework effectively distinguishes and evaluates conservative and aggressive driving states during interactions, demonstrating good adaptability and effectiveness in various regional settings.
Read more5/7/2024
💬
0
A Language Agent for Autonomous Driving
Jiageng Mao, Junjie Ye, Yuxi Qian, Marco Pavone, Yue Wang
Human-level driving is an ultimate goal of autonomous driving. Conventional approaches formulate autonomous driving as a perception-prediction-planning framework, yet their systems do not capitalize on the inherent reasoning ability and experiential knowledge of humans. In this paper, we propose a fundamental paradigm shift from current pipelines, exploiting Large Language Models (LLMs) as a cognitive agent to integrate human-like intelligence into autonomous driving systems. Our approach, termed Agent-Driver, transforms the traditional autonomous driving pipeline by introducing a versatile tool library accessible via function calls, a cognitive memory of common sense and experiential knowledge for decision-making, and a reasoning engine capable of chain-of-thought reasoning, task planning, motion planning, and self-reflection. Powered by LLMs, our Agent-Driver is endowed with intuitive common sense and robust reasoning capabilities, thus enabling a more nuanced, human-like approach to autonomous driving. We evaluate our approach on the large-scale nuScenes benchmark, and extensive experiments substantiate that our Agent-Driver significantly outperforms the state-of-the-art driving methods by a large margin. Our approach also demonstrates superior interpretability and few-shot learning ability to these methods.
Read more7/30/2024

0
New!DRIVE: Dependable Robust Interpretable Visionary Ensemble Framework in Autonomous Driving
Songning Lai, Tianlang Xue, Hongru Xiao, Lijie Hu, Jiemin Wu, Ninghui Feng, Runwei Guan, Haicheng Liao, Zhenning Li, Yutao Yue
Recent advancements in autonomous driving have seen a paradigm shift towards end-to-end learning paradigms, which map sensory inputs directly to driving actions, thereby enhancing the robustness and adaptability of autonomous vehicles. However, these models often sacrifice interpretability, posing significant challenges to trust, safety, and regulatory compliance. To address these issues, we introduce DRIVE -- Dependable Robust Interpretable Visionary Ensemble Framework in Autonomous Driving, a comprehensive framework designed to improve the dependability and stability of explanations in end-to-end unsupervised autonomous driving models. Our work specifically targets the inherent instability problems observed in the Driving through the Concept Gridlock (DCG) model, which undermine the trustworthiness of its explanations and decision-making processes. We define four key attributes of DRIVE: consistent interpretability, stable interpretability, consistent output, and stable output. These attributes collectively ensure that explanations remain reliable and robust across different scenarios and perturbations. Through extensive empirical evaluations, we demonstrate the effectiveness of our framework in enhancing the stability and dependability of explanations, thereby addressing the limitations of current models. Our contributions include an in-depth analysis of the dependability issues within the DCG model, a rigorous definition of DRIVE with its fundamental properties, a framework to implement DRIVE, and novel metrics for evaluating the dependability of concept-based explainable autonomous driving models. These advancements lay the groundwork for the development of more reliable and trusted autonomous driving systems, paving the way for their broader acceptance and deployment in real-world applications.
Read more9/17/2024