Towards a Universal Evaluation Model for Careful and Competent Autonomous Driving

0

Sign in to get full access
Overview
- The paper proposes a universal evaluation model for assessing the safety and competence of autonomous driving systems.
- Key concepts include "careful" and "competent" driving, which refer to safe and skillful operation of autonomous vehicles.
- The model aims to provide a standardized framework for evaluating autonomous driving capabilities across different scenarios and environments.
Plain English Explanation
The researchers in this paper are trying to develop a universal way to test and evaluate how well autonomous driving systems perform. They want to create a standard set of criteria that can be used to assess the safety and skillfulness of self-driving cars in a variety of real-world driving situations.
The key ideas are "careful" driving, which means the car operates in a safe and responsible manner, and "competent" driving, which means the car can skillfully navigate different road conditions and scenarios. The goal is to have a consistent way to measure how well autonomous vehicles are able to drive carefully and competently, no matter the specific circumstances.
This would be useful for comparing the capabilities of different self-driving car technologies, as well as identifying areas where further improvements are needed to ensure these systems can drive as safely and effectively as human drivers. By having a universal evaluation model, the researchers hope to provide a reliable framework for assessing the readiness of autonomous driving for widespread deployment.
Technical Explanation
The paper proposes a Universal Evaluation Model for Careful and Competent Autonomous Driving. The model defines "careful" driving as the safe and responsible operation of autonomous vehicles, and "competent" driving as the skillful navigation of various road conditions and scenarios.
The researchers argue that a standardized framework is needed to consistently evaluate the capabilities of autonomous driving systems across different environments and use cases. To address this, they outline key elements of the evaluation model, including:
- Scenario-based testing to assess performance in a range of real-world driving situations.
- Data-driven virtual testing to supplement physical testing and expand the evaluation coverage.
- Hierarchical risk-aware planning to ensure autonomous vehicles can navigate safely and make appropriate decisions.
- Systematic data acquisition to build comprehensive datasets for model training and evaluation.
- Data selection and assessment methods to ensure the quality and representativeness of the data used.
By incorporating these elements, the proposed Universal Evaluation Model aims to provide a comprehensive and standardized approach for assessing the safety and competence of autonomous driving systems.
Critical Analysis
The paper presents a well-structured framework for evaluating autonomous driving capabilities, addressing key challenges such as scenario-based testing, data-driven simulation, and risk-aware planning. However, the authors acknowledge several limitations and areas for further research:
- The model may need to be further refined and validated using real-world data and extensive testing to ensure its effectiveness in diverse driving conditions.
- Incorporating human factors and interaction dynamics into the evaluation process could be an important area for improvement.
- Scalability and computational efficiency of the proposed methods may need to be considered for practical deployment.
Additionally, the paper does not discuss potential ethical considerations or societal implications of the universal evaluation model, such as the impact on public trust, liability, and the broader transition to autonomous mobility.
Conclusion
The proposed Universal Evaluation Model for Careful and Competent Autonomous Driving represents a significant step towards a standardized framework for assessing the safety and capabilities of self-driving car technologies. By addressing key aspects of scenario-based testing, data-driven simulation, and risk-aware planning, the model aims to provide a comprehensive and reliable approach for evaluating autonomous driving performance.
While the paper highlights important research directions, further work is needed to refine and validate the model, as well as to consider the broader societal implications of this technology. Nevertheless, the development of such a universal evaluation framework is a crucial milestone in the ongoing efforts to ensure the safe and widespread deployment of autonomous vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Towards a Universal Evaluation Model for Careful and Competent Autonomous Driving
Kethan Reddy, Elias Nassif, Panagiotis Angeloudis, Mohammed Quddus, Washington Ochieng
Virtual scenario-based testing methods to validate autonomous driving systems are predominantly centred around collision avoidance, and lack a comprehensive approach to evaluate optimal driving behaviour holistically. Furthermore, current validation approaches do not align with authorisation and monitoring requirements put forth by regulatory bodies. We address these validation gaps by outlining a universal evaluation framework that: incorporates the notion of careful and competent driving, unifies behavioural competencies and evaluation criteria, and is amenable at a scenario-specific and aggregate behaviour level. This framework can be leveraged to evaluate optimal driving in scenario-based testing, and for post-deployment monitoring to ensure continual compliance with regulation and safety standards.
Read more7/23/2024
0
An Approach to Systematic Data Acquisition and Data-Driven Simulation for the Safety Testing of Automated Driving Functions
Leon Eisemann, Mirjam Fehling-Kaschek, Henrik Gommel, David Hermann, Marvin Klemp, Martin Lauer, Benjamin Lickert, Florian Luettner, Robin Moss, Nicole Neis, Maria Pohle, Simon Romanski, Daniel Stadler, Alexander Stolz, Jens Ziehn, Jingxing Zhou
With growing complexity and criticality of automated driving functions in road traffic and their operational design domains (ODD), there is increasing demand for covering significant proportions of development, validation, and verification in virtual environments and through simulation models. If, however, simulations are meant not only to augment real-world experiments, but to replace them, quantitative approaches are required that measure to what degree and under which preconditions simulation models adequately represent reality, and thus, using their results accordingly. Especially in R&D areas related to the safety impact of the open world, there is a significant shortage of real-world data to parameterize and/or validate simulations - especially with respect to the behavior of human traffic participants, whom automated driving functions will meet in mixed traffic. We present an approach to systematically acquire data in public traffic by heterogeneous means, transform it into a unified representation, and use it to automatically parameterize traffic behavior models for use in data-driven virtual validation of automated driving functions.
Read more5/6/2024

0
Integrating Naturalistic Insights in Objective Multi-Vehicle Safety Framework
Enrico Del Re, Amirhesam Aghanouri, Cristina Olaverri-Monreal
As autonomous vehicle technology advances, the precise assessment of safety in complex traffic scenarios becomes crucial, especially in mixed-vehicle environments where human perception of safety must be taken into account. This paper presents a framework designed for assessing traffic safety in multi-vehicle situations, facilitating the simultaneous utilization of diverse objective safety metrics. Additionally, it allows the integration of subjective perception of safety by adjusting model parameters. The framework was applied to evaluate various model configurations in car-following scenarios on a highway, utilizing naturalistic driving datasets. The evaluation of the model showed an outstanding performance, particularly when integrating multiple objective safety measures. Furthermore, the performance was significantly enhanced when considering all surrounding vehicles.
Read more8/20/2024
0
Evaluation of Drivers' Interaction Ability at Social Scenarios: A Process-Based Framework
Jiaqi Liu, Peng Hang, Xiangwang Hu, Jian Sun
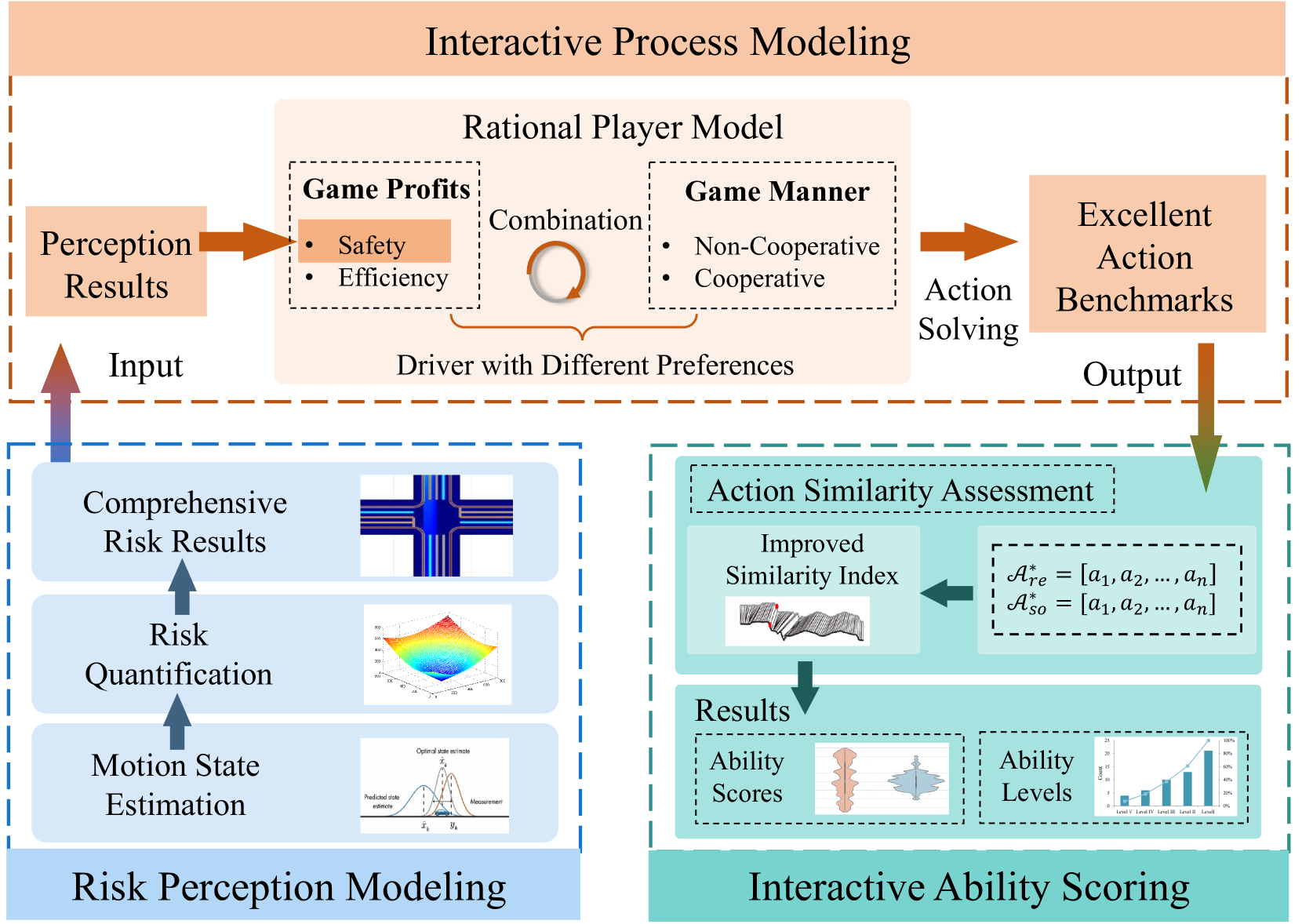
Assessing drivers' interaction capabilities is crucial for understanding human driving behavior and enhancing the interactive abilities of autonomous vehicles. In scenarios involving strong interaction, existing metrics focused on interaction outcomes struggle to capture the evolutionary process of drivers' interactive behaviors, making it challenging for autonomous vehicles to dynamically assess and respond to other agents during interactions. To address this issue, we propose a framework for assessing drivers' interaction capabilities, oriented towards the interactive process itself, which includes three components: Interaction Risk Perception, Interaction Process Modeling, and Interaction Ability Scoring. We quantify interaction risks through motion state estimation and risk field theory, followed by introducing a dynamic action assessment benchmark based on a game-theoretical rational agent model, and designing a capability scoring metric based on morphological similarity distance. By calculating real-time differences between a driver's actions and the assessment benchmark, the driver's interaction capabilities are scored dynamically. We validated our framework at unsignalized intersections as a typical scenario. Validation analysis on driver behavior datasets from China and the USA shows that our framework effectively distinguishes and evaluates conservative and aggressive driving states during interactions, demonstrating good adaptability and effectiveness in various regional settings.
Read more5/7/2024