Differentiable Rendering as a Way to Program Cable-Driven Soft Robots
2404.07590
0
0
Abstract
Soft robots have gained increased popularity in recent years due to their adaptability and compliance. In this paper, we use a digital twin model of cable-driven soft robots to learn control parameters in simulation. In doing so, we take advantage of differentiable rendering as a way to instruct robots to complete tasks such as point reach, gripping an object, and obstacle avoidance. This approach simplifies the mathematical description of such complicated tasks and removes the need for landmark points and their tracking. Our experiments demonstrate the applicability of our method.
Create account to get full access
Overview
- This paper describes a novel approach to programming cable-driven soft robots using differentiable rendering.
- The method allows for optimizing the robot's control parameters by backpropagating through a differentiable simulation of the robot's behavior.
- This enables efficient and precise control of soft robots without the need for complex manual programming.
Plain English Explanation
Soft robots are a type of robot that are designed to be flexible and adaptable, rather than rigid and fixed like traditional robots. They are often inspired by the movements of living creatures, like octopuses or snakes.
One way to control soft robots is by using cables that pull and tug on different parts of the robot's body. However, programming these cable-driven soft robots can be very challenging, as their behavior is complex and difficult to predict.
This paper introduces a new technique called "differentiable rendering" that makes it easier to program and control cable-driven soft robots. The key idea is to create a computer simulation of the robot that can accurately model how the cables influence the robot's movements. By running this simulation and then using a mathematical technique called backpropagation, the researchers can automatically figure out the best settings for the cables to make the robot move in a desired way.
This differentiable rendering approach has several advantages. It allows the robot's control parameters to be optimized efficiently, without the need for tedious manual programming. It also enables precise control of the soft robot's behavior, which is important for many real-world applications. Overall, this work represents an important advance in the field of soft robotics, making it easier to create and control these flexible, adaptable machines.
Technical Explanation
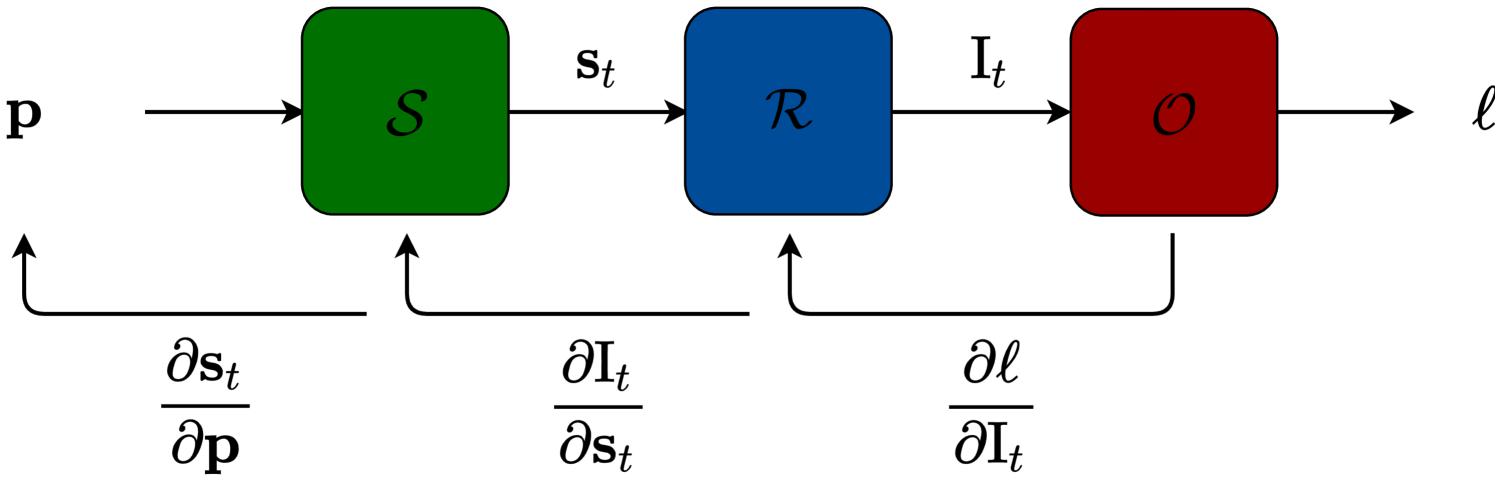
The key innovation in this paper is the use of differentiable rendering to program cable-driven soft robots. The authors develop a differentiable simulation of the robot's dynamics, which allows them to compute gradients of the robot's behavior with respect to its control parameters (such as cable tensions).
By backpropagating these gradients, the researchers can efficiently optimize the robot's control parameters to achieve a desired behavior. This differentiable approach contrasts with traditional methods that rely on manual tuning or reinforcement learning, which can be time-consuming and lack precision.
The authors demonstrate their differentiable rendering technique on several cable-driven soft robot examples, including a gripper and a snake-like robot. They show that their method can accurately capture the complex nonlinear dynamics of these soft robots, and use the resulting gradients to optimize the robots' behaviors for tasks like grasping and locomotion.
Critical Analysis
The authors acknowledge several limitations of their approach. First, the differentiable simulation relies on a simplified model of the robot's dynamics, which may not fully capture all the complexities of real-world soft robots. There is also the challenge of ensuring the simulation accurately reflects the physical system, particularly for complex deformations and contact interactions.
Additionally, the authors note that their current implementation requires significant computational resources, which could limit its practicality for real-time control of soft robots. Further research may be needed to improve the efficiency and scalability of the differentiable rendering approach.
It would also be valuable to see the authors explore the application of their method to more diverse soft robot designs, beyond the gripper and snake-like robots presented in the paper. Demonstrating the generalizability of the approach would strengthen its impact.
Overall, this work represents an important step forward in the field of soft robotics, providing a novel and promising technique for programming and controlling these flexible, adaptable machines. Further research and development will be needed to fully realize the potential of differentiable rendering for soft robot control.
Conclusion
This paper introduces a new approach to programming cable-driven soft robots using differentiable rendering. By creating a differentiable simulation of the robot's dynamics, the authors can efficiently optimize the robot's control parameters to achieve desired behaviors through backpropagation.
The key advantage of this method is that it allows for precise and automated control of soft robots, without the need for complex manual programming. This could significantly simplify the development and deployment of cable-driven soft robots for a wide range of applications, from grasping and manipulation to locomotion and beyond.
While the authors acknowledge some limitations of their current implementation, this work represents an important step forward in the field of soft robotics. As the [technology for hysteresis compensation and simulation of soft robots continues to advance, differentiable rendering may become an increasingly valuable tool for programming and controlling these flexible, adaptable machines.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤖
Evolution and learning in differentiable robots
Luke Strgar, David Matthews, Tyler Hummer, Sam Kriegman
0
0
The automatic design of robots has existed for 30 years but has been constricted by serial non-differentiable design evaluations, premature convergence to simple bodies or clumsy behaviors, and a lack of sim2real transfer to physical machines. Thus, here we employ massively-parallel differentiable simulations to rapidly and simultaneously optimize individual neural control of behavior across a large population of candidate body plans and return a fitness score for each design based on the performance of its fully optimized behavior. Non-differentiable changes to the mechanical structure of each robot in the population -- mutations that rearrange, combine, add, or remove body parts -- were applied by a genetic algorithm in an outer loop of search, generating a continuous flow of novel morphologies with highly-coordinated and graceful behaviors honed by gradient descent. This enabled the exploration of several orders-of-magnitude more designs than all previous methods, despite the fact that robots here have the potential to be much more complex, in terms of number of independent motors, than those in prior studies. We found that evolution reliably produces ``increasingly differentiable'' robots: body plans that smooth the loss landscape in which learning operates and thereby provide better training paths toward performant behaviors. Finally, one of the highly differentiable morphologies discovered in simulation was realized as a physical robot and shown to retain its optimized behavior. This provides a cyberphysical platform to investigate the relationship between evolution and learning in biological systems and broadens our understanding of how a robot's physical structure can influence the ability to train policies for it. Videos and code at https://sites.google.com/view/eldir.
5/28/2024
🛸
DiffGen: Robot Demonstration Generation via Differentiable Physics Simulation, Differentiable Rendering, and Vision-Language Model
Yang Jin, Jun Lv, Shuqiang Jiang, Cewu Lu
0
0
Generating robot demonstrations through simulation is widely recognized as an effective way to scale up robot data. Previous work often trained reinforcement learning agents to generate expert policies, but this approach lacks sample efficiency. Recently, a line of work has attempted to generate robot demonstrations via differentiable simulation, which is promising but heavily relies on reward design, a labor-intensive process. In this paper, we propose DiffGen, a novel framework that integrates differentiable physics simulation, differentiable rendering, and a vision-language model to enable automatic and efficient generation of robot demonstrations. Given a simulated robot manipulation scenario and a natural language instruction, DiffGen can generate realistic robot demonstrations by minimizing the distance between the embedding of the language instruction and the embedding of the simulated observation after manipulation. The embeddings are obtained from the vision-language model, and the optimization is achieved by calculating and descending gradients through the differentiable simulation, differentiable rendering, and vision-language model components, thereby accomplishing the specified task. Experiments demonstrate that with DiffGen, we could efficiently and effectively generate robot data with minimal human effort or training time.
5/14/2024

Design and Nonlinear Modeling of a Modular Cable Driven Soft Robotic Arm
Xinda Qi, Yu Mei, Dong Chen, Zhaojian Li, Xiaobo Tan
0
0
We propose a novel multi-section cable-driven soft robotic arm inspired by octopus tentacles along with a new modeling approach. Each section of the modular manipulator is made of a soft tubing backbone, a soft silicon arm body, and two rigid endcaps, which connect adjacent sections and decouple the actuation cables of different sections. The soft robotic arm is made with casting after the rigid endcaps are 3D-printed, achieving low-cost and convenient fabrication. To capture the nonlinear effect of cables pushing into the soft silicon arm body, which results from the absence of intermediate rigid cable guides for higher compliance, an analytical static model is developed to capture the relationship between the bending curvature and the cable lengths. The proposed model shows superior prediction performance in experiments over that of a baseline model, especially under large bending conditions. Based on the nonlinear static model, a kinematic model of a multi-section arm is further developed and used to derive a motion planning algorithm. Experiments show that the proposed soft arm has high flexibility and a large workspace, and the tracking errors under the algorithm based on the proposed modeling approach are up to 52$%$ smaller than those with the algorithm derived from the baseline model. The presented modeling approach is expected to be applicable to a broad range of soft cable-driven actuators and manipulators.
5/17/2024
🤖
Creation of Novel Soft Robot Designs using Generative AI
Wee Kiat Chan, PengWei Wang, Raye Chen-Hua Yeow
0
0
Soft robotics has emerged as a promising field with the potential to revolutionize industries such as healthcare and manufacturing. However, designing effective soft robots presents challenges, particularly in managing the complex interplay of material properties, structural design, and control strategies. Traditional design methods are often time-consuming and may not yield optimal designs. In this paper, we explore the use of generative AI to create 3D models of soft actuators. We create a dataset of over 70 text-shape pairings of soft pneumatic robot actuator designs, and adapt a latent diffusion model (SDFusion) to learn the data distribution and generate novel designs from it. By employing transfer learning and data augmentation techniques, we significantly improve the performance of the diffusion model. These findings highlight the potential of generative AI in designing complex soft robotic systems, paving the way for future advancements in the field.
5/6/2024