Experimental Evaluation of Road-Crossing Decisions by Autonomous Wheelchairs against Environmental Factors

0
Sign in to get full access
Overview
- This paper presents an experimental evaluation of road-crossing decisions by autonomous wheelchairs in response to various environmental factors.
- The researchers investigate how autonomous wheelchairs navigate and make decisions when crossing roads, and how their behavior is influenced by different environmental conditions.
- The goal is to understand the performance and limitations of autonomous wheelchair systems in real-world settings, which has implications for improving the safety and reliability of these systems.
Plain English Explanation
Autonomous wheelchairs are wheelchairs that can navigate and operate on their own, without a human driver. In this research, the scientists wanted to see how these autonomous wheelchairs handle the task of crossing roads, and how their decision-making is affected by different environmental factors.
Crossing roads can be a challenging task for autonomous systems, as they need to detect and respond to various cues like traffic, pedestrians, and weather conditions. By studying how autonomous wheelchairs perform in these situations, the researchers can identify areas for improvement and help make these systems more reliable and safe for users.
The paper looks at factors like the speed of the wheelchair, the distance to oncoming vehicles, and the visibility conditions (e.g., sunny, rainy, foggy) to understand how the wheelchair's behavior changes in response to these environmental variables. This kind of experimental testing is important for developing autonomous systems that can navigate the real world effectively and keep their users safe.
Technical Explanation
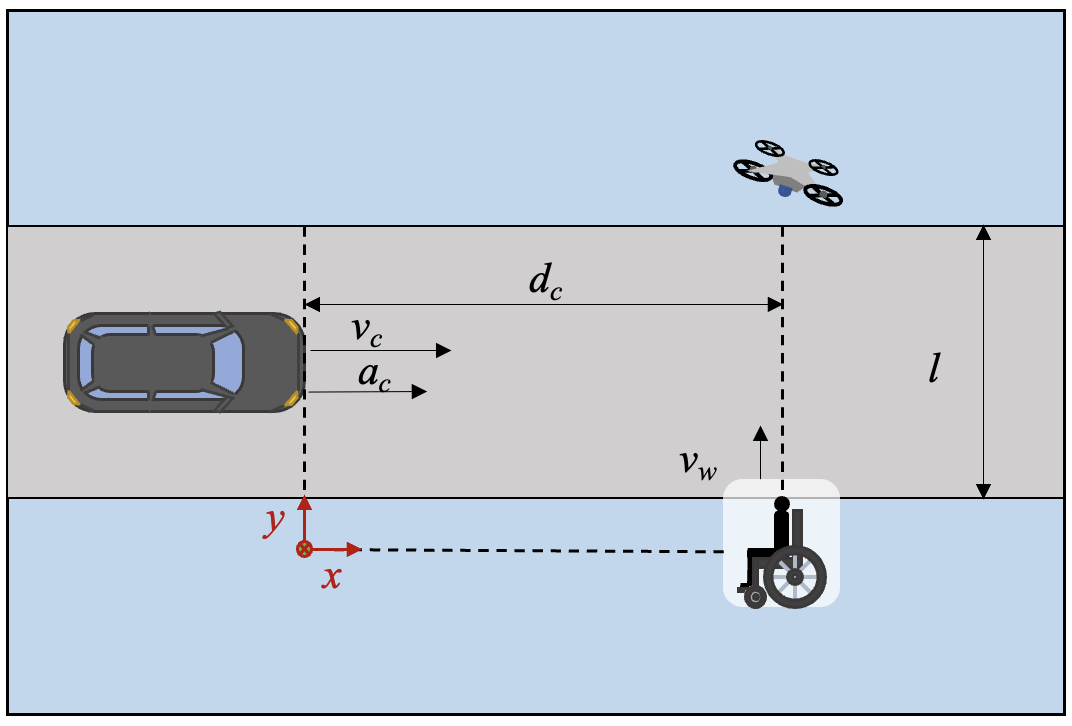
The researchers conducted a series of experiments to evaluate the road-crossing behavior of autonomous wheelchairs under different environmental conditions. They used a custom-built test track that simulated various road-crossing scenarios, with factors like vehicle speed, distance to the wheelchair, and visibility conditions being systematically varied.
The autonomous wheelchairs were equipped with sensors, cameras, and decision-making algorithms to detect and respond to the environmental cues. The researchers measured the wheelchairs' crossing times, safety margins (distance to vehicles), and other performance metrics to assess how the systems performed.
The results showed that the autonomous wheelchairs were generally able to navigate the road-crossing tasks, but their behavior was significantly influenced by the environmental factors. For example, in low-visibility conditions like fog or rain, the wheelchairs tended to be more cautious and took longer to cross the road, resulting in larger safety margins. The researchers also observed that the wheelchair's speed and the distance to oncoming vehicles played a key role in the decision-making process.
By understanding how these environmental factors impact the performance of autonomous wheelchairs, the researchers can help design more robust and adaptable systems that can handle a variety of real-world situations. This knowledge can inform the development of safer and more reliable autonomous mobility solutions for people with disabilities.
Critical Analysis
The researchers acknowledge several limitations and areas for further research in their paper. For instance, the experiments were conducted on a controlled test track, and it would be valuable to evaluate the systems' performance in more complex, real-world road environments. Additionally, the study focused on a limited set of environmental factors, and there may be other variables (e.g., pedestrian behavior, road conditions) that could influence the autonomous wheelchairs' decision-making.
One potential concern is the generalizability of the findings, as the study was conducted with a specific type of autonomous wheelchair system. It would be important to validate the results with a broader range of autonomous mobility platforms to ensure the insights are applicable across different technologies and use cases.
Furthermore, the paper does not delve deeply into the ethical implications of autonomous wheelchair systems, such as the prioritization of safety versus other factors (e.g., efficiency, user experience) in the decision-making algorithms. As these systems become more prevalent, it will be crucial to address such ethical considerations to ensure they are designed and deployed in a responsible manner.
Conclusion
This paper presents a valuable experimental evaluation of how autonomous wheelchairs navigate and make decisions when crossing roads in response to various environmental factors. The findings provide valuable insights into the performance and limitations of these systems, which can inform the development of more robust and reliable autonomous mobility solutions for people with disabilities.
By understanding the impact of factors like visibility, vehicle speed, and distance on the decision-making of autonomous wheelchairs, researchers and engineers can work to improve the safety and adaptability of these systems. This research represents an important step towards realizing the full potential of autonomous wheelchair technology to enhance the independence and quality of life for users.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Experimental Evaluation of Road-Crossing Decisions by Autonomous Wheelchairs against Environmental Factors
Franca Corradini, Carlo Grigioni, Alessandro Antonucci, J'er^ome Guzzi, Francesco Flammini
Safe road crossing by autonomous wheelchairs can be affected by several environmental factors such as adverse weather conditions influencing the accuracy of artificial vision. Previous studies have addressed experimental evaluation of multi-sensor information fusion to support road-crossing decisions in autonomous wheelchairs. In this study, we focus on the fine-tuning of tracking performance and on its experimental evaluation against outdoor environmental factors such as fog, rain, darkness, etc. It is rather intuitive that those factors can negatively affect the tracking performance; therefore our aim is to provide an approach to quantify their effects in the reference scenario, in order to detect conditions of unacceptable accuracy. In those cases, warnings can be issued and system can be possibly reconfigured to reduce the reputation of less accurate sensors, and thus improve overall safety. Critical situations can be detected by the main sensors or by additional sensors, e.g., light sensors, rain sensors, etc. Results have been achieved by using an available laboratory dataset and by applying appropriate software filters; they show that the approach can be adopted to evaluate video tracking and event detection robustness against outdoor environmental factors in relevant operational scenarios.
Read more6/28/2024

0
Real-Time Environment Condition Classification for Autonomous Vehicles
Marco Introvigne, Andrea Ramazzina, Stefanie Walz, Dominik Scheuble, Mario Bijelic
Current autonomous driving technologies are being rolled out in geo-fenced areas with well-defined operation conditions such as time of operation, area, weather conditions and road conditions. In this way, challenging conditions as adverse weather, slippery road or densely-populated city centers can be excluded. In order to lift the geo-fenced restriction and allow a more dynamic availability of autonomous driving functions, it is necessary for the vehicle to autonomously perform an environment condition assessment in real time to identify when the system cannot operate safely and either stop operation or require the resting passenger to take control. In particular, adverse-weather challenges are a fundamental limitation as sensor performance degenerates quickly, prohibiting the use of sensors such as cameras to locate and monitor road signs, pedestrians or other vehicles. To address this issue, we train a deep learning model to identify outdoor weather and dangerous road conditions, enabling a quick reaction to new situations and environments. We achieve this by introducing an improved taxonomy and label hierarchy for a state-of-the-art adverse-weather dataset, relabelling it with a novel semi-automated labeling pipeline. Using the novel proposed dataset and hierarchy, we train RECNet, a deep learning model for the classification of environment conditions from a single RGB frame. We outperform baseline models by relative 16% in F1- Score, while maintaining a real-time capable performance of 20 Hz.
Read more5/30/2024

0
Fairness in Autonomous Driving: Towards Understanding Confounding Factors in Object Detection under Challenging Weather
Bimsara Pathiraja, Caleb Liu, Ransalu Senanayake
The deployment of autonomous vehicles (AVs) is rapidly expanding to numerous cities. At the heart of AVs, the object detection module assumes a paramount role, directly influencing all downstream decision-making tasks by considering the presence of nearby pedestrians, vehicles, and more. Despite high accuracy of pedestrians detected on held-out datasets, the potential presence of algorithmic bias in such object detectors, particularly in challenging weather conditions, remains unclear. This study provides a comprehensive empirical analysis of fairness in detecting pedestrians in a state-of-the-art transformer-based object detector. In addition to classical metrics, we introduce novel probability-based metrics to measure various intricate properties of object detection. Leveraging the state-of-the-art FACET dataset and the Carla high-fidelity vehicle simulator, our analysis explores the effect of protected attributes such as gender, skin tone, and body size on object detection performance in varying environmental conditions such as ambient darkness and fog. Our quantitative analysis reveals how the previously overlooked yet intuitive factors, such as the distribution of demographic groups in the scene, the severity of weather, the pedestrians' proximity to the AV, among others, affect object detection performance. Our code is available at https://github.com/bimsarapathiraja/fair-AV.
Read more6/4/2024
🛠️
0
Evaluation and Optimization of Adaptive Cruise Control in Autonomous Vehicles using the CARLA Simulator: A Study on Performance under Wet and Dry Weather Conditions
Roza Al-Hindaw, Taqwa I. Alhadidi, Mohammad Adas
Adaptive Cruise Control ACC can change the speed of the ego vehicle to maintain a safe distance from the following vehicle automatically. The primary purpose of this research is to use cutting-edge computing approaches to locate and track vehicles in real time under various conditions to achieve a safe ACC. The paper examines the extension of ACC employing depth cameras and radar sensors within Autonomous Vehicles AVs to respond in real time by changing weather conditions using the Car Learning to Act CARLA simulation platform at noon. The ego vehicle controller's decision to accelerate or decelerate depends on the speed of the leading ahead vehicle and the safe distance from that vehicle. Simulation results show that a Proportional Integral Derivative PID control of autonomous vehicles using a depth camera and radar sensors reduces the speed of the leading vehicle and the ego vehicle when it rains. In addition, longer travel time was observed for both vehicles in rainy conditions than in dry conditions. Also, PID control prevents the leading vehicle from rear collisions
Read more5/3/2024