Real-Time Environment Condition Classification for Autonomous Vehicles

0

Sign in to get full access
Overview
- This research paper focuses on real-time environment condition classification for autonomous vehicles.
- It aims to develop a system that can accurately and quickly identify the current environmental conditions, such as weather, lighting, and road type, to enable autonomous vehicles to adapt their behavior accordingly.
- The researchers explore the use of multi-sensor fusion and deep learning techniques to achieve this goal.
Plain English Explanation
Autonomous vehicles, such as self-driving cars, need to be able to "understand" the environment they are operating in to make safe and effective decisions. This includes being able to quickly and accurately identify things like the current weather conditions, the time of day, and the type of road they are on.
The researchers in this paper have developed a system that uses a combination of different sensors (e.g., cameras, GPS, etc.) and advanced AI techniques to classify the current environment conditions in real-time. This information can then be used by the autonomous vehicle to adjust its driving behavior accordingly, such as slowing down in heavy rain or snow, or navigating differently on a dirt road versus a paved highway.
The key innovation here is the use of "multi-sensor fusion" - combining data from multiple sensors to get a more complete and reliable picture of the environment. This is combined with "deep learning" algorithms that can quickly analyze all this sensor data and classify the environment conditions.
Overall, this research aims to make autonomous vehicles more adaptable and capable of handling a wide range of real-world driving conditions, which is essential for their widespread adoption and safe operation.
Technical Explanation
The key elements of this research paper include:
-
Sensor Suite: The system utilizes a multi-modal sensor suite, including cameras, LiDAR, GPS, and other environmental sensors, to capture a comprehensive view of the driving environment.
-
Multi-Sensor Fusion: The researchers employ "context-based multi-sensor fusion" techniques to integrate the data from the various sensors and obtain a holistic understanding of the environment.
-
Deep Learning Architecture: A deep neural network is trained to classify the current environment conditions, such as weather (e.g., sunny, rainy, snowy), lighting (e.g., daytime, nighttime, twilight), and road type (e.g., highway, urban, rural), using the fused sensor data as input.
-
Evaluation: The proposed system is evaluated on a large-scale dataset of driving scenarios, and its performance is compared to other state-of-the-art approaches. The researchers demonstrate that their method achieves high accuracy in real-time environment condition classification.
-
Robustness: The system is tested under a variety of "challenging driving conditions", such as nighttime and inclement weather, to assess its robustness and reliability.
Critical Analysis
The researchers have addressed several important considerations in their work:
-
Limitations: The paper acknowledges that the system's performance may be influenced by the quality and coverage of the training data, and that further research is needed to improve its generalization to a wider range of environmental conditions.
-
Future Work: The authors suggest exploring the integration of this environment classification system with other autonomous vehicle subsystems, such as "adaptive cruise control" and "object detection", to enable more comprehensive and adaptive vehicle behavior.
-
Potential Issues: While the system demonstrates robust performance, there may be edge cases or unanticipated scenarios where its classification accuracy could be compromised, which would require further investigation and mitigation strategies.
Conclusion
This research paper presents a promising approach for real-time environment condition classification in autonomous vehicles. By leveraging multi-sensor fusion and deep learning techniques, the proposed system can accurately and quickly identify the current driving environment, enabling autonomous vehicles to adapt their behavior accordingly.
The implications of this work are significant, as it can contribute to the development of more reliable and adaptable autonomous driving systems that can operate safely in a wide range of real-world conditions. This is a critical step towards the widespread adoption and deployment of autonomous vehicles, which have the potential to improve transportation safety, efficiency, and accessibility.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Real-Time Environment Condition Classification for Autonomous Vehicles
Marco Introvigne, Andrea Ramazzina, Stefanie Walz, Dominik Scheuble, Mario Bijelic
Current autonomous driving technologies are being rolled out in geo-fenced areas with well-defined operation conditions such as time of operation, area, weather conditions and road conditions. In this way, challenging conditions as adverse weather, slippery road or densely-populated city centers can be excluded. In order to lift the geo-fenced restriction and allow a more dynamic availability of autonomous driving functions, it is necessary for the vehicle to autonomously perform an environment condition assessment in real time to identify when the system cannot operate safely and either stop operation or require the resting passenger to take control. In particular, adverse-weather challenges are a fundamental limitation as sensor performance degenerates quickly, prohibiting the use of sensors such as cameras to locate and monitor road signs, pedestrians or other vehicles. To address this issue, we train a deep learning model to identify outdoor weather and dangerous road conditions, enabling a quick reaction to new situations and environments. We achieve this by introducing an improved taxonomy and label hierarchy for a state-of-the-art adverse-weather dataset, relabelling it with a novel semi-automated labeling pipeline. Using the novel proposed dataset and hierarchy, we train RECNet, a deep learning model for the classification of environment conditions from a single RGB frame. We outperform baseline models by relative 16% in F1- Score, while maintaining a real-time capable performance of 20 Hz.
Read more5/30/2024

0
AllWeatherNet:Unified Image enhancement for autonomous driving under adverse weather and lowlight-conditions
Chenghao Qian, Mahdi Rezaei, Saeed Anwar, Wenjing Li, Tanveer Hussain, Mohsen Azarmi, Wei Wang
Adverse conditions like snow, rain, nighttime, and fog, pose challenges for autonomous driving perception systems. Existing methods have limited effectiveness in improving essential computer vision tasks, such as semantic segmentation, and often focus on only one specific condition, such as removing rain or translating nighttime images into daytime ones. To address these limitations, we propose a method to improve the visual quality and clarity degraded by such adverse conditions. Our method, AllWeather-Net, utilizes a novel hierarchical architecture to enhance images across all adverse conditions. This architecture incorporates information at three semantic levels: scene, object, and texture, by discriminating patches at each level. Furthermore, we introduce a Scaled Illumination-aware Attention Mechanism (SIAM) that guides the learning towards road elements critical for autonomous driving perception. SIAM exhibits robustness, remaining unaffected by changes in weather conditions or environmental scenes. AllWeather-Net effectively transforms images into normal weather and daytime scenes, demonstrating superior image enhancement results and subsequently enhancing the performance of semantic segmentation, with up to a 5.3% improvement in mIoU in the trained domain. We also show our model's generalization ability by applying it to unseen domains without re-training, achieving up to 3.9% mIoU improvement. Code can be accessed at: https://github.com/Jumponthemoon/AllWeatherNet.
Read more9/4/2024
0
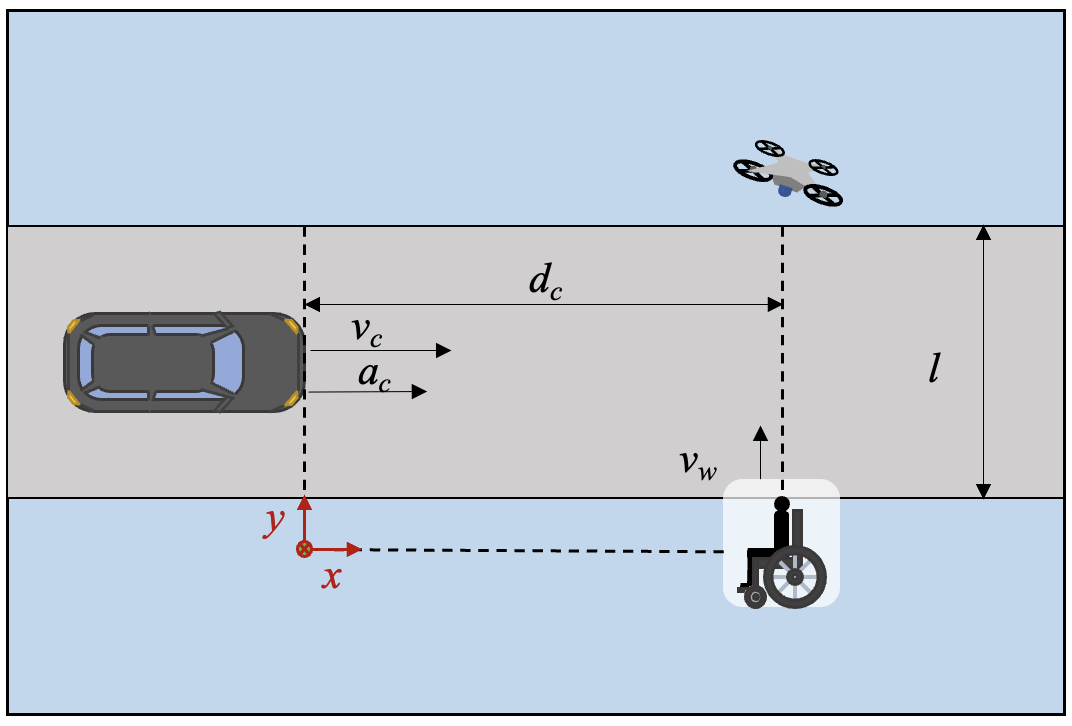
Experimental Evaluation of Road-Crossing Decisions by Autonomous Wheelchairs against Environmental Factors
Franca Corradini, Carlo Grigioni, Alessandro Antonucci, J'er^ome Guzzi, Francesco Flammini
Safe road crossing by autonomous wheelchairs can be affected by several environmental factors such as adverse weather conditions influencing the accuracy of artificial vision. Previous studies have addressed experimental evaluation of multi-sensor information fusion to support road-crossing decisions in autonomous wheelchairs. In this study, we focus on the fine-tuning of tracking performance and on its experimental evaluation against outdoor environmental factors such as fog, rain, darkness, etc. It is rather intuitive that those factors can negatively affect the tracking performance; therefore our aim is to provide an approach to quantify their effects in the reference scenario, in order to detect conditions of unacceptable accuracy. In those cases, warnings can be issued and system can be possibly reconfigured to reduce the reputation of less accurate sensors, and thus improve overall safety. Critical situations can be detected by the main sensors or by additional sensors, e.g., light sensors, rain sensors, etc. Results have been achieved by using an available laboratory dataset and by applying appropriate software filters; they show that the approach can be adopted to evaluate video tracking and event detection robustness against outdoor environmental factors in relevant operational scenarios.
Read more6/28/2024

0
Robust ADAS: Enhancing Robustness of Machine Learning-based Advanced Driver Assistance Systems for Adverse Weather
Muhammad Zaeem Shahzad, Muhammad Abdullah Hanif, Muhammad Shafique
In the realm of deploying Machine Learning-based Advanced Driver Assistance Systems (ML-ADAS) into real-world scenarios, adverse weather conditions pose a significant challenge. Conventional ML models trained on clear weather data falter when faced with scenarios like extreme fog or heavy rain, potentially leading to accidents and safety hazards. This paper addresses this issue by proposing a novel approach: employing a Denoising Deep Neural Network as a preprocessing step to transform adverse weather images into clear weather images, thereby enhancing the robustness of ML-ADAS systems. The proposed method eliminates the need for retraining all subsequent Depp Neural Networks (DNN) in the ML-ADAS pipeline, thus saving computational resources and time. Moreover, it improves driver visualization, which is critical for safe navigation in adverse weather conditions. By leveraging the UNet architecture trained on an augmented KITTI dataset with synthetic adverse weather images, we develop the Weather UNet (WUNet) DNN to remove weather artifacts. Our study demonstrates substantial performance improvements in object detection with WUNet preprocessing under adverse weather conditions. Notably, in scenarios involving extreme fog, our proposed solution improves the mean Average Precision (mAP) score of the YOLOv8n from 4% to 70%.
Read more7/4/2024