Evaluation and Optimization of Adaptive Cruise Control in Autonomous Vehicles using the CARLA Simulator: A Study on Performance under Wet and Dry Weather Conditions

0
🛠️
Sign in to get full access
Overview
- Adaptive Cruise Control (ACC) can automatically adjust the speed of a vehicle to maintain a safe distance from the vehicle in front of it.
- This research aims to use advanced computing methods to detect and track vehicles in real-time under various conditions to enable a safe ACC system.
- The paper explores extending ACC using depth cameras and radar sensors in Autonomous Vehicles (AVs) to respond to changing weather conditions, tested in the CARLA simulation platform.
Plain English Explanation
Adaptive Cruise Control (ACC) is a technology that can automatically control a vehicle's speed to maintain a safe following distance from the car in front of it. This research aims to improve ACC by using advanced computer vision and sensor fusion techniques to better detect and track the surrounding vehicles, even in changing weather conditions.
The researchers tested their approach in a driving simulation called CARLA, which allowed them to simulate different weather scenarios like rain. By using a depth camera and radar sensors, the ACC system could react more quickly to the lead vehicle's movements and adjust the ego vehicle's speed accordingly, helping to prevent rear-end collisions.
The key idea is to use a combination of different sensor inputs, rather than relying on a single camera or radar alone. This sensor fusion approach can provide a more robust and reliable understanding of the vehicle's surroundings, which is crucial for safely controlling the car's speed and distance from other vehicles, especially in challenging conditions like rain.
Technical Explanation
The researchers used a Proportional-Integral-Derivative (PID) control system to manage the acceleration and deceleration of the ego vehicle based on the speed and distance of the leading vehicle. By incorporating data from a depth camera and radar sensors, the system could respond in real-time to changes in the lead vehicle's speed and the weather conditions.
Simulation results showed that the PID control system was able to reduce the speed of both the lead vehicle and the ego vehicle when it rained, compared to dry conditions. Additionally, the researchers observed longer travel times for both vehicles in rainy conditions, indicating the system's ability to maintain a safe following distance and avoid collisions.
The use of multiple sensors, including depth cameras and radar, allows the ACC system to build a more comprehensive and reliable understanding of the vehicle's surroundings, which is crucial for safely controlling the car's speed and distance from other vehicles, especially in challenging conditions like rain.
Critical Analysis
The paper provides a promising approach to improving Adaptive Cruise Control systems, particularly in terms of their ability to respond to changing environmental conditions. However, the research is limited to simulation-based experiments, and further testing would be needed to validate the system's performance in real-world driving scenarios.
Additionally, the paper does not address potential issues related to human-machine interaction in automated vehicles and how the ACC system's behavior might be perceived and accepted by human drivers. This is an important consideration for the widespread adoption and trust in such technologies.
Overall, the research presents a valuable contribution to the field of autonomous vehicle control, but more work is needed to fully understand the practical implications and limitations of the proposed approach.
Conclusion
This research explores the use of advanced computing techniques, such as sensor fusion and PID control, to enhance the performance of Adaptive Cruise Control systems in Autonomous Vehicles. By incorporating data from depth cameras and radar sensors, the ACC system can respond more effectively to changing weather conditions, helping to maintain a safe following distance and prevent rear-end collisions.
The simulation results are promising, but further real-world testing and addressing potential human-machine interaction challenges will be crucial for the successful deployment and acceptance of such technologies. Nonetheless, this work represents an important step towards improving the safety and reliability of autonomous vehicle systems, which can have significant implications for the future of transportation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛠️
0
Evaluation and Optimization of Adaptive Cruise Control in Autonomous Vehicles using the CARLA Simulator: A Study on Performance under Wet and Dry Weather Conditions
Roza Al-Hindaw, Taqwa I. Alhadidi, Mohammad Adas
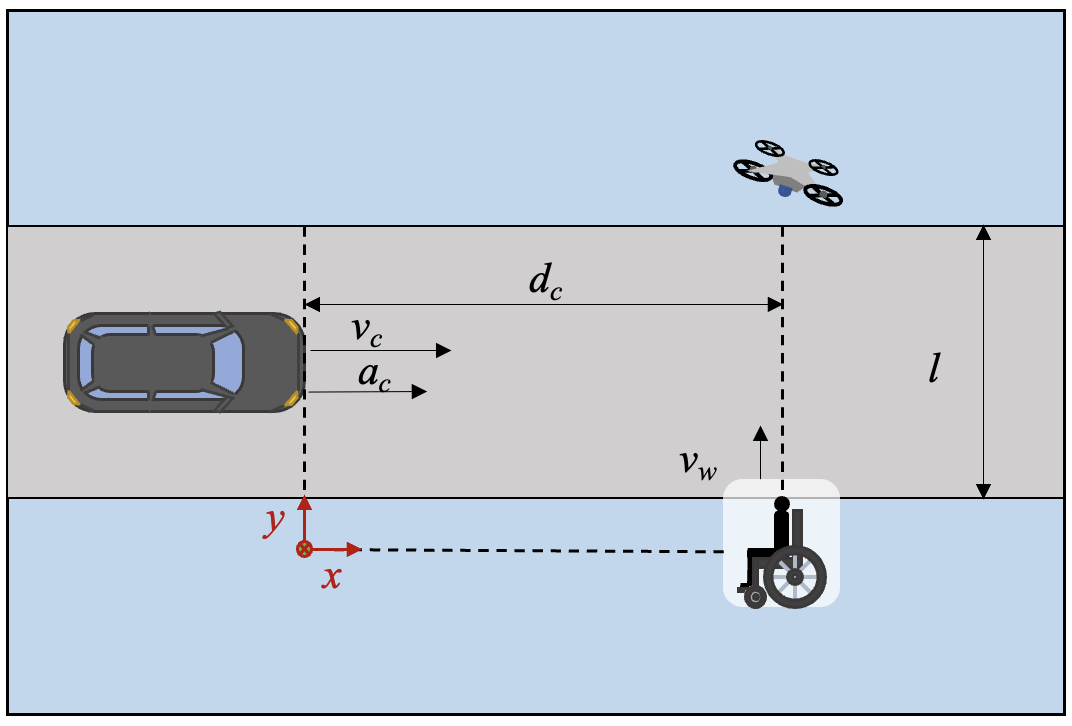
Adaptive Cruise Control ACC can change the speed of the ego vehicle to maintain a safe distance from the following vehicle automatically. The primary purpose of this research is to use cutting-edge computing approaches to locate and track vehicles in real time under various conditions to achieve a safe ACC. The paper examines the extension of ACC employing depth cameras and radar sensors within Autonomous Vehicles AVs to respond in real time by changing weather conditions using the Car Learning to Act CARLA simulation platform at noon. The ego vehicle controller's decision to accelerate or decelerate depends on the speed of the leading ahead vehicle and the safe distance from that vehicle. Simulation results show that a Proportional Integral Derivative PID control of autonomous vehicles using a depth camera and radar sensors reduces the speed of the leading vehicle and the ego vehicle when it rains. In addition, longer travel time was observed for both vehicles in rainy conditions than in dry conditions. Also, PID control prevents the leading vehicle from rear collisions
Read more5/3/2024

0
EditFollower: Tunable Car Following Models for Customizable Adaptive Cruise Control Systems
Xianda Chen, Xu Han, Meixin Zhu, Xiaowen Chu, PakHin Tiu, Xinhu Zheng, Yinhai Wang
In the realm of driving technologies, fully autonomous vehicles have not been widely adopted yet, making advanced driver assistance systems (ADAS) crucial for enhancing driving experiences. Adaptive Cruise Control (ACC) emerges as a pivotal component of ADAS. However, current ACC systems often employ fixed settings, failing to intuitively capture drivers' social preferences and leading to potential function disengagement. To overcome these limitations, we propose the Editable Behavior Generation (EBG) model, a data-driven car-following model that allows for adjusting driving discourtesy levels. The framework integrates diverse courtesy calculation methods into long short-term memory (LSTM) and Transformer architectures, offering a comprehensive approach to capture nuanced driving dynamics. By integrating various discourtesy values during the training process, our model generates realistic agent trajectories with different levels of courtesy in car-following behavior. Experimental results on the HighD and Waymo datasets showcase a reduction in Mean Squared Error (MSE) of spacing and MSE of speed compared to baselines, establishing style controllability. To the best of our knowledge, this work represents the first data-driven car-following model capable of dynamically adjusting discourtesy levels. Our model provides valuable insights for the development of ACC systems that take into account drivers' social preferences.
Read more7/4/2024

0
Real-Time Environment Condition Classification for Autonomous Vehicles
Marco Introvigne, Andrea Ramazzina, Stefanie Walz, Dominik Scheuble, Mario Bijelic
Current autonomous driving technologies are being rolled out in geo-fenced areas with well-defined operation conditions such as time of operation, area, weather conditions and road conditions. In this way, challenging conditions as adverse weather, slippery road or densely-populated city centers can be excluded. In order to lift the geo-fenced restriction and allow a more dynamic availability of autonomous driving functions, it is necessary for the vehicle to autonomously perform an environment condition assessment in real time to identify when the system cannot operate safely and either stop operation or require the resting passenger to take control. In particular, adverse-weather challenges are a fundamental limitation as sensor performance degenerates quickly, prohibiting the use of sensors such as cameras to locate and monitor road signs, pedestrians or other vehicles. To address this issue, we train a deep learning model to identify outdoor weather and dangerous road conditions, enabling a quick reaction to new situations and environments. We achieve this by introducing an improved taxonomy and label hierarchy for a state-of-the-art adverse-weather dataset, relabelling it with a novel semi-automated labeling pipeline. Using the novel proposed dataset and hierarchy, we train RECNet, a deep learning model for the classification of environment conditions from a single RGB frame. We outperform baseline models by relative 16% in F1- Score, while maintaining a real-time capable performance of 20 Hz.
Read more5/30/2024
0
Experimental Evaluation of Road-Crossing Decisions by Autonomous Wheelchairs against Environmental Factors
Franca Corradini, Carlo Grigioni, Alessandro Antonucci, J'er^ome Guzzi, Francesco Flammini
Safe road crossing by autonomous wheelchairs can be affected by several environmental factors such as adverse weather conditions influencing the accuracy of artificial vision. Previous studies have addressed experimental evaluation of multi-sensor information fusion to support road-crossing decisions in autonomous wheelchairs. In this study, we focus on the fine-tuning of tracking performance and on its experimental evaluation against outdoor environmental factors such as fog, rain, darkness, etc. It is rather intuitive that those factors can negatively affect the tracking performance; therefore our aim is to provide an approach to quantify their effects in the reference scenario, in order to detect conditions of unacceptable accuracy. In those cases, warnings can be issued and system can be possibly reconfigured to reduce the reputation of less accurate sensors, and thus improve overall safety. Critical situations can be detected by the main sensors or by additional sensors, e.g., light sensors, rain sensors, etc. Results have been achieved by using an available laboratory dataset and by applying appropriate software filters; they show that the approach can be adopted to evaluate video tracking and event detection robustness against outdoor environmental factors in relevant operational scenarios.
Read more6/28/2024