Experimental Evaluation of ROS-Causal in Real-World Human-Robot Spatial Interaction Scenarios

0

Sign in to get full access
Overview
- This paper experimentally evaluates the use of ROS-Causal, a framework for incorporating causal reasoning into robotic systems, in real-world human-robot spatial interaction scenarios.
- The researchers investigate how ROS-Causal can improve the performance and safety of robots navigating and interacting with humans in complex, dynamic environments.
- Key aspects of the study include experiment design, system architecture, and insights gained from the evaluation.
Plain English Explanation
In this study, the researchers looked at how a framework called ROS-Causal could help robots better understand and interact with humans in real-world situations. ROS-Causal is a tool that allows robots to reason about cause and effect, which can be important for safely navigating and collaborating with people.
The researchers set up experiments where robots had to move around and interact with humans in different scenarios, like an office or a hallway. They wanted to see if using ROS-Causal would help the robots perform better and avoid accidents or conflicts with the people they were interacting with.
The key ideas were to design the experiments carefully, build the robots' systems using ROS-Causal, and then analyze the insights gained from the evaluation. This could help advance the field of human-robot interaction and make robots more effective and safe when working alongside people.
Technical Explanation
The researchers experimentally evaluated the use of ROS-Causal in real-world human-robot spatial interaction scenarios. ROS-Causal is a framework for incorporating causal reasoning into robotic systems, which can be important for safely navigating and collaborating with people in complex, dynamic environments.
The experiment design involved setting up various scenarios, such as an office or a hallway, where robots had to move around and interact with humans. The researchers built the robots' systems using the ROS-Causal framework and compared their performance to baseline approaches that did not use causal reasoning.
The key insights from the evaluation include:
- ROS-Causal helped the robots better understand the causal relationships between their actions and the resulting effects on the humans they were interacting with.
- This improved the robots' ability to navigate safely and avoid conflicts or accidents with people in the environment.
- The researchers also found that ROS-Causal enabled the robots to more effectively coordinate their movements and actions with the humans, leading to more natural and efficient collaboration.
Critical Analysis
The paper provides a thorough evaluation of ROS-Causal in real-world human-robot interaction scenarios, but it also acknowledges some limitations and areas for further research.
One potential caveat is that the experiments were conducted in relatively controlled environments, and the researchers note that more work is needed to assess the performance of ROS-Causal in more complex, unpredictable real-world settings. Additionally, the paper suggests that the causal reasoning capabilities of ROS-Causal could be further enhanced to improve the robots' understanding of the dynamic relationships between their actions and the humans' responses.
Another area for further research mentioned in the paper is the scalability of ROS-Causal, as the computational overhead of the causal reasoning process could become a challenge when dealing with larger numbers of robots and humans in a single environment.
Overall, the research presented in this paper is a valuable contribution to the field of human-robot interaction, and the insights gained from the evaluation of ROS-Causal can help inform the development of more intelligent and socially aware robotic systems.
Conclusion
This study experimentally evaluated the use of ROS-Causal, a framework for incorporating causal reasoning into robotic systems, in real-world human-robot spatial interaction scenarios. The researchers found that ROS-Causal helped the robots better understand the causal relationships between their actions and the resulting effects on the humans they were interacting with, leading to improved navigation, safety, and collaboration.
The insights gained from this research contribute to the advancement of human-robot interaction, suggesting that causal reasoning can be a valuable tool for developing more intelligent and socially aware robotic systems. While the study was conducted in relatively controlled environments, the researchers have identified areas for further exploration, such as assessing ROS-Causal's performance in more complex, unpredictable real-world settings and exploring ways to enhance its causal reasoning capabilities.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Experimental Evaluation of ROS-Causal in Real-World Human-Robot Spatial Interaction Scenarios
Luca Castri, Gloria Beraldo, Sariah Mghames, Marc Hanheide, Nicola Bellotto
Deploying robots in human-shared environments requires a deep understanding of how nearby agents and objects interact. Employing causal inference to model cause-and-effect relationships facilitates the prediction of human behaviours and enables the anticipation of robot interventions. However, a significant challenge arises due to the absence of implementation of existing causal discovery methods within the ROS ecosystem, the standard de-facto framework in robotics, hindering effective utilisation on real robots. To bridge this gap, in our previous work we proposed ROS-Causal, a ROS-based framework designed for onboard data collection and causal discovery in human-robot spatial interactions. In this work, we present an experimental evaluation of ROS-Causal both in simulation and on a new dataset of human-robot spatial interactions in a lab scenario, to assess its performance and effectiveness. Our analysis demonstrates the efficacy of this approach, showcasing how causal models can be extracted directly onboard by robots during data collection. The online causal models generated from the simulation are consistent with those from lab experiments. These findings can help researchers to enhance the performance of robotic systems in shared environments, firstly by studying the causal relations between variables in simulation without real people, and then facilitating the actual robot deployment in real human environments. ROS-Causal: https://lcastri.github.io/roscausal
Read more6/10/2024

0
Causality-Aware Transformer Networks for Robotic Navigation
Ruoyu Wang, Yao Liu, Yuanjiang Cao, Lina Yao
Recent advances in machine learning algorithms have garnered growing interest in developing versatile Embodied AI systems. However, current research in this domain reveals opportunities for improvement. First, the direct adoption of RNNs and Transformers often overlooks the specific differences between Embodied AI and traditional sequential data modelling, potentially limiting its performance in Embodied AI tasks. Second, the reliance on task-specific configurations, such as pre-trained modules and dataset-specific logic, compromises the generalizability of these methods. We address these constraints by initially exploring the unique differences between Embodied AI tasks and other sequential data tasks through the lens of Causality, presenting a causal framework to elucidate the inadequacies of conventional sequential methods for Embodied AI. By leveraging this causal perspective, we propose Causality-Aware Transformer (CAT) Networks for Navigation, featuring a Causal Understanding Module to enhance the models's Environmental Understanding capability. Meanwhile, our method is devoid of task-specific inductive biases and can be trained in an End-to-End manner, which enhances the method's generalizability across various contexts. Empirical evaluations demonstrate that our methodology consistently surpasses benchmark performances across a spectrum of settings, tasks and simulation environments. Extensive ablation studies reveal that the performance gains can be attributed to the Causal Understanding Module, which demonstrates effectiveness and efficiency in both Reinforcement Learning and Supervised Learning settings.
Read more9/5/2024
0
Structured Graph Network for Constrained Robot Crowd Navigation with Low Fidelity Simulation
Shuijing Liu, Kaiwen Hong, Neeloy Chakraborty, Katherine Driggs-Campbell
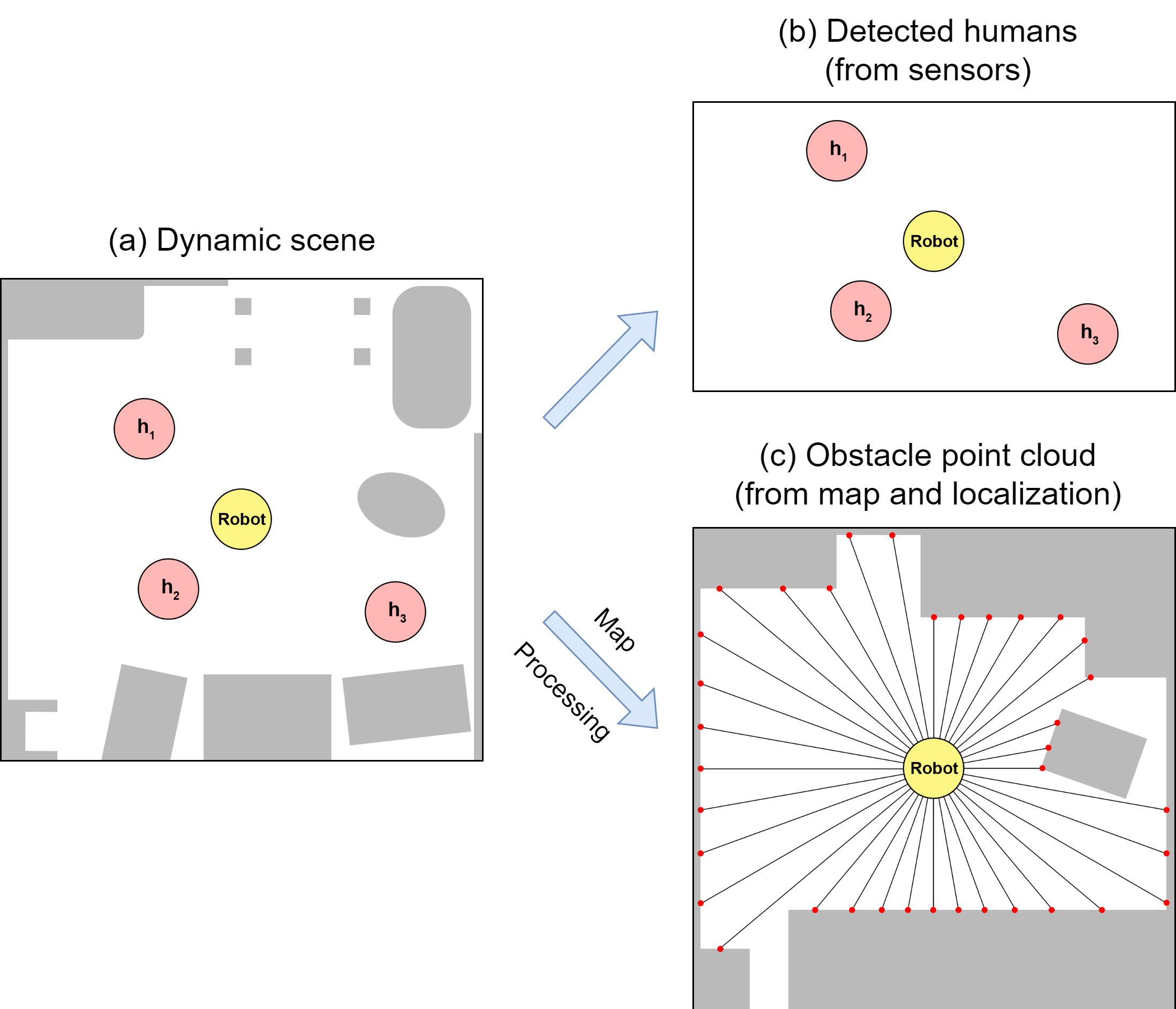
We investigate the feasibility of deploying reinforcement learning (RL) policies for constrained crowd navigation using a low-fidelity simulator. We introduce a representation of the dynamic environment, separating human and obstacle representations. Humans are represented through detected states, while obstacles are represented as computed point clouds based on maps and robot localization. This representation enables RL policies trained in a low-fidelity simulator to deploy in real world with a reduced sim2real gap. Additionally, we propose a spatio-temporal graph to model the interactions between agents and obstacles. Based on the graph, we use attention mechanisms to capture the robot-human, human-human, and human-obstacle interactions. Our method significantly improves navigation performance in both simulated and real-world environments. Video demonstrations can be found at https://sites.google.com/view/constrained-crowdnav/home.
Read more5/29/2024

0
The Causal Chambers: Real Physical Systems as a Testbed for AI Methodology
Juan L. Gamella, Jonas Peters, Peter Buhlmann
In some fields of AI, machine learning and statistics, the validation of new methods and algorithms is often hindered by the scarcity of suitable real-world datasets. Researchers must often turn to simulated data, which yields limited information about the applicability of the proposed methods to real problems. As a step forward, we have constructed two devices that allow us to quickly and inexpensively produce large datasets from non-trivial but well-understood physical systems. The devices, which we call causal chambers, are computer-controlled laboratories that allow us to manipulate and measure an array of variables from these physical systems, providing a rich testbed for algorithms from a variety of fields. We illustrate potential applications through a series of case studies in fields such as causal discovery, out-of-distribution generalization, change point detection, independent component analysis, and symbolic regression. For applications to causal inference, the chambers allow us to carefully perform interventions. We also provide and empirically validate a causal model of each chamber, which can be used as ground truth for different tasks. All hardware and software is made open source, and the datasets are publicly available at causalchamber.org or through the Python package causalchamber.
Read more8/27/2024